深度学习和计算机视觉中的基础数学知识(一)
2.1 线性变换与非线性变换
2-1叫相加性,2-2叫齐性

2.1.2 旋转、缩放与矩阵乘法

旋转坐标
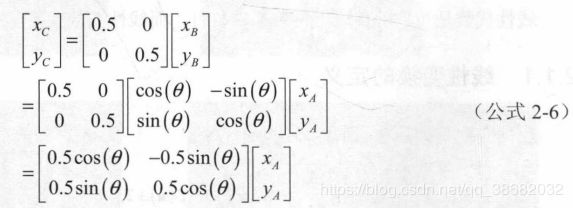
矩阵形式

缩放坐标的矩阵形式(B → \to →C)
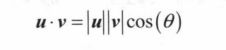
2.1.3 点积和投影
点积定义: 两个向量对应元素两两相乘,并求和
从矩阵角度看,相当于 u v T u v^T uvT, u 乘 v 的 转 置 u乘v的转置 u乘v的转置


(内积是点积的推广,点积是欧几里得空间的标准内积)
-
向量长度的运算


投影 :一个向量在另一个向量方向上的分量的长度
点积的几何意义:一个向量在另一个向量方向的投影的长度与另一个向量的长度相乘(比如图中, 2 × 3 = 6 2\times 3=6 2×3=6) -
投影长度的计算
具有交换性,(可以u投v ✖ v,也可以 v 投 u✖u,不影响结果) -
余弦相似度的推导



在机器学习中经常用到。
2.1.4 矩阵乘法的几何意义(1)
1.从投影的角度理解
矩阵 T ∈ R m × n \boldsymbol T \in \mathbb R^{m\times n} T∈Rm×n,乘以向量 ( x 1 , x 2 , . . . , x n ) (x_1,x_2,...,x_n) (x1,x2,...,xn)

分解为 矩阵的每一行向量 与 待乘向量 点积结果 形成新向量
等于 x x x 在 a i , ∗ a_{i,*} ai,∗上的投影
如果a看成一个坐标轴的单位向量,那么x在a上的投影就是,x在坐标轴上投影的长度
(因为a是单位向量(长度为1),所以投影长度乘1长度没有变。)
乘法的最终结果,是x在以每个a为坐标轴单位向量的新坐标系下的坐标。
-举前面的例子(旋转缩放中,)

变换后的坐标轴的单位向量。
![]()
图左: 向量在新坐标系(虚线)的投影。
图右:新坐标系取代老坐标系,得到新的坐标。

2.坐标映射角度理解
坐标系的轴不正交,甚至向量长度不为1,就难以想象矩阵乘法的结果。
(正交在本节的解释:任意坐标轴方向上的向量,在其他坐标轴方向上的投影长度都是0)
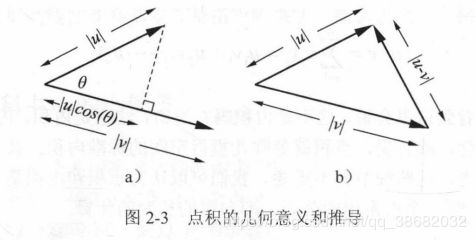
比如下面这个例子。


a)中(1,1)在两个行向量(1,4)和(2,-1)上的投影还能理解
b)第一眼看不出来什么东西 (至少博主没看出来),因为参考坐标系变换了,而平时人们想象的都是笛卡尔坐标系。
笛卡尔坐标系(Cartesian coordinates)就是直角坐标系和斜坐标系的统称。
相交于原点的两条数轴,构成了平面放射坐标系。如两条数轴上的度量单位相等,则称此放射坐标系为笛卡尔坐标系。两条数轴互相垂直的笛卡尔坐标系,称为笛卡尔直角坐标系,否则称为笛卡尔斜角坐标系。
我们先研究一下,坐标轴单位向量的变化(1,0),(0,1)与旋转矩阵相乘之后

结论:第i维度的单位向量,在矩阵乘法变换之后,就是第i列向量
原来的红色矩形被拉伸成蓝色的平行四边形了,也就得到了(1,1)变换后的结果(1,5)
重新看投影角度的例子。(蓝色,新的坐标轴单位向量,红色是老的坐标轴单位向量)

都是例子(在矩形里加了一个笑脸,更加直观)

矩阵相加,实现平移

上图如果是一个回归问题,矩阵乘法不能单独解决问题,必须加上一个矩阵,成为偏置(bias)
y = A x + b \boldsymbol{y=Ax+b} y=Ax+b,就叫做仿射变换,(就是一个线性变换加一个平移变换)
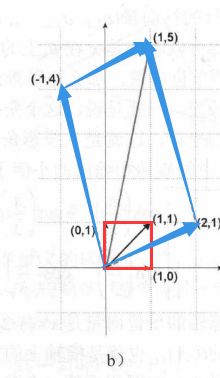
2.1.5 本征向量和本征值 (特征向量,特征值)

本征向量在变换后,方向没有改变。(或者相反, λ < 0 \lambda<0 λ<0)
- 例子
单位坐标轴的变换

上个例子是非对称矩阵,机器学习中常用的是对称矩阵,尤其是其中的正定矩阵。
正定矩阵定义:(x 为任意非0 向量, A 对称矩阵)
向量与正定矩阵相乘后的变换结果不会 到与自身垂直平面的另一侧(夹角不超过90度)。
对称矩阵:元素以主对角线为对称轴对应相等的矩阵。
![]()
两个特征向量相互垂直。
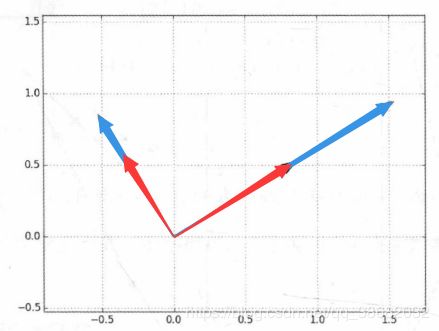
红色变换前,蓝色变换后。
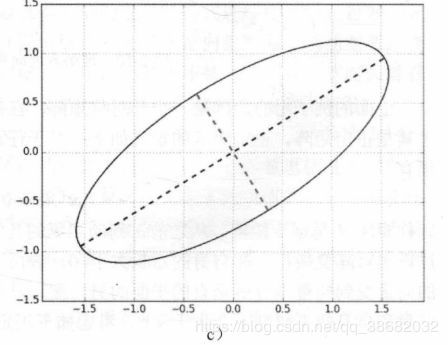
如果在原坐标系画单位长度为半径的圆,在变换后就变成了椭圆。

特征值和特征向量刚好是椭圆长短轴的一半长度和方向 (PCA的底层思想)
矩阵变化的前后可以在空间里找到一组正交的向量,在变换前后方向不变,空间只是在这组方向上进行伸缩。
2.1.6 矩阵乘法的几何意义(2)
- 从旋转和拉伸的角度理解
变换矩阵:

接下来把 变换分解为3个步骤
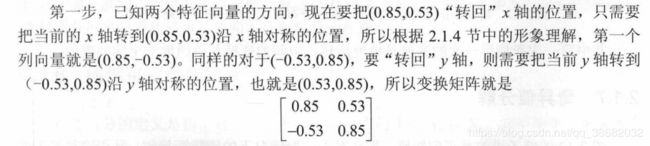
第一次变换,把两个特征向量作为的新的单位坐标轴向量。
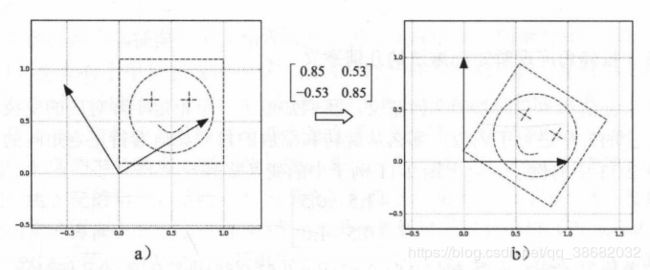
第二次变换,沿着轴进行缩放。
第三步,把坐标轴转回原来的位置(乘以一个转置)。

下图为三步整体图。

2.1.7 奇异值分解
(把上节正定矩阵分解的例子推广到一般情况)

∑ \sum ∑表示一个对角矩阵。 U , V U,V U,V为正交矩阵。
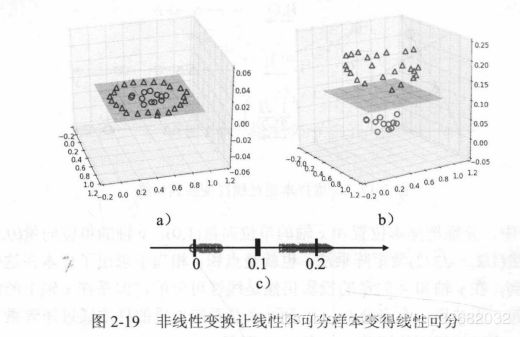
2.1.8 线性可分性和维度

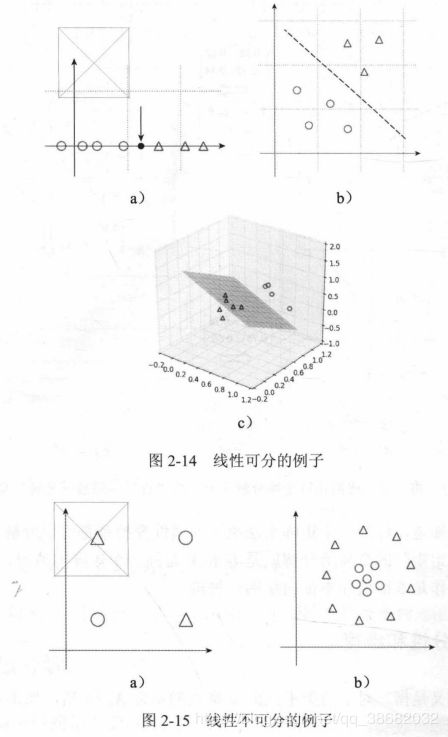
![]()
2.1.9 非线性变换