1.浏览RYU官网学习RYU控制器的安装和RYU开发入门教程,提交你对于教程代码的理解,包括但不限于:
描述官方教程实现了一个什么样的交换机功能?
实现了一个将接收到的数据包发送到所有端口的交换机功能
控制器设定交换机支持什么版本的OpenFlow?
OpenFlow 1.0
控制器设定了交换机如何处理数据包?
from ryu.base import app_manager
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER
from ryu.controller.handler import set_ev_cls
from ryu.ofproto import ofproto_v1_0
class L2Switch(app_manager.RyuApp):
OFP_VERSIONS = [ofproto_v1_0.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(L2Switch, self).__init__(*args, **kwargs)
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)
def packet_in_handler(self, ev):
msg = ev.msg
dp = msg.datapath
ofp = dp.ofproto
ofp_parser = dp.ofproto_parser
actions = [ofp_parser.OFPActionOutput(ofp.OFPP_FLOOD)]
out = ofp_parser.OFPPacketOut(
datapath=dp, buffer_id=msg.buffer_id, in_port=msg.in_port,
actions=actions)
dp.send_msg(out)在L2Switch类中添加了“packet_in_handler”。当Ryu接收到消息中的OpenFlow的packet_in数据包时调用此函数。“set-ev-cls”这个decorator告诉Ryu何时应该调用修饰函数。
decorator的第一个参数指示应该调用此函数的事件类型。每次Ryu在消息中收到一个packet_时,都会调用此函数。
第二个参数指示开关的状态。您可能希望在Ryu和交换机之间的协商完成之前忽略消息中的packet_。使用“MAIN_DISPATCHER”作为第二个参数意味着仅在协商完成后才调用此函数。
“packet_in_handler”函数的前半部分。
msg是表示数据结构中的数据包的对象。
dp是表示数据路径(开关)的对象。
proto和proto廑解析器是表示Ryu和switch协商的OpenFlow协议的对象。
下半部分
OFPActionOutput类与数据包输出消息一起使用,以指定要从中发送数据包的交换机端口。此应用程序使用OFPP_FLOOD标志来指示应在所有端口上发送数据包。
OFPPacketOut类用于生成包输出消息。
如果使用OpenFlow消息类对象调用Datapath类的send_msg方法,Ryu将生成在线数据格式并将其发送到交换机。
2.根据官方教程和提供的示例代码(SimpleSwitch.py),将具有自学习功能的交换机代码(SelfLearning.py)补充完整
完整代码
from ryu.base import app_manager
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER
from ryu.controller.handler import set_ev_cls
from ryu.ofproto import ofproto_v1_0
from ryu.lib.mac import haddr_to_bin
from ryu.lib.packet import packet
from ryu.lib.packet import ethernet
from ryu.lib.packet import ether_types
class SimpleSwitch(app_manager.RyuApp):
# TODO define OpenFlow 1.0 version for the switch
OFP_VERSIONS = [ofproto_v1_0.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(SimpleSwitch, self).__init__(*args, **kwargs)
self.mac_to_port = {}
def add_flow(self, datapath, in_port, dst, src, actions):
ofproto = datapath.ofproto
match = datapath.ofproto_parser.OFPMatch(
in_port=in_port,
dl_dst=haddr_to_bin(dst), dl_src=haddr_to_bin(src))
mod = datapath.ofproto_parser.OFPFlowMod(
datapath=datapath, match=match, cookie=0,
command=ofproto.OFPFC_ADD, idle_timeout=0, hard_timeout=0,
priority=ofproto.OFP_DEFAULT_PRIORITY,
flags=ofproto.OFPFF_SEND_FLOW_REM, actions=actions)
# TODO send modified message out
datapath.send_msg(mod)
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)
def _packet_in_handler(self, ev):
msg = ev.msg
datapath = msg.datapath
ofproto = datapath.ofproto
pkt = packet.Packet(msg.data)
eth = pkt.get_protocol(ethernet.ethernet)
if eth.ethertype == ether_types.ETH_TYPE_LLDP:
# ignore lldp packet
return
if eth.ethertype == ether_types.ETH_TYPE_IPV6:
# ignore ipv6 packet
return
dst = eth.dst
src = eth.src
dpid = datapath.id
self.mac_to_port.setdefault(dpid, {})
self.logger.info("packet in DPID:%s MAC_SRC:%s MAC_DST:%s IN_PORT:%s", dpid, src, dst, msg.in_port)
# learn a mac address to avoid FLOOD next time.
self.mac_to_port[dpid][src] = msg.in_port
if dst in self.mac_to_port[dpid]:
out_port = self.mac_to_port[dpid][dst]
else:
out_port = ofproto.OFPP_FLOOD
# TODO define the action for output
actions = [datapath.ofproto_parser.OFPActionOutput(out_port)]
# install a flow to avoid packet_in next time
if out_port != ofproto.OFPP_FLOOD:
self.logger.info("add flow s:DPID:%s Match:[ MAC_SRC:%s MAC_DST:%s IN_PORT:%s ], Action:[OUT_PUT:%s] ",
dpid, src, dst, msg.in_port, out_port)
self.add_flow(datapath, msg.in_port, dst, src, actions)
data = None
if msg.buffer_id == ofproto.OFP_NO_BUFFER:
data = msg.data
# TODO define the OpenFlow Packet Out
out = datapath.ofproto_parser.OFPPacketOut(datapath=datapath, buffer_id=msg.buffer_id, in_port=msg.in_port,
actions=actions, data=data)
datapath.send_msg(out)
print("PACKET_OUT...")3.在mininet创建一个最简拓扑,并连接RYU控制器
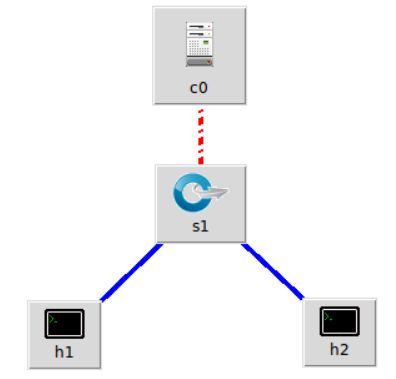
python拓扑代码
from mininet.topo import Topo
class MyTopo(Topo):
def __init__(self):
# initilaize topology
Topo.__init__(self)
# add hosts and switches
h1 = self.addHost('h1')
h2 = self.addHost('h2')
s1 = self.addSwitch('s1')
# add links
self.addLink(h1, s1, 1, 1)
self.addLink(h2, s1, 1, 2)
topos = {'mytopo': (lambda: MyTopo())}sudo mn --custom ./easy.py --topo mytopo --controller=remote,ip=127.0.0.1,port=6633 --switch ovsk,protocols=OpenFlow10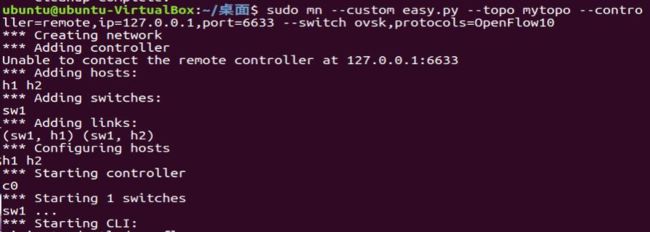
4.验证自学习交换机的功能,提交分析过程和验证结果
运行RYU控制器,指导交换机执行转发

输入h1 ping h2,测试主机之间的连通性

在mininet中查看s1的流表
