项目要用A算法做运算所以边学边练。
http://edu.manew.com/course/44/task/432/show# 视屏
启发式搜索:在状态空间中搜索对每一个搜索位置进行评估,得到最好位置,再从这个位置进行搜索直到目标。省略大量无谓搜索路径,提高效率。
在启发式搜索中对位置评估十分重要。
估价函数:从当前节点移动到目标节点的预估费用。寻路常用曼哈顿估价函数。
A算法特点:理论上时间最优,缺点:空间增长指数级别。(优化:二叉堆)(不会)
储存列表
开启列表:待检查方格集合列表,寻找周围可达到的点,加入列表,并保存中心点为父节点。
关闭列表:列表中保存不需要再次检查的方格。
路径评分
G-与起始点的距离
H-与目标点的距离
F值=G+H;
F,G和H的评分被写在每个方格里
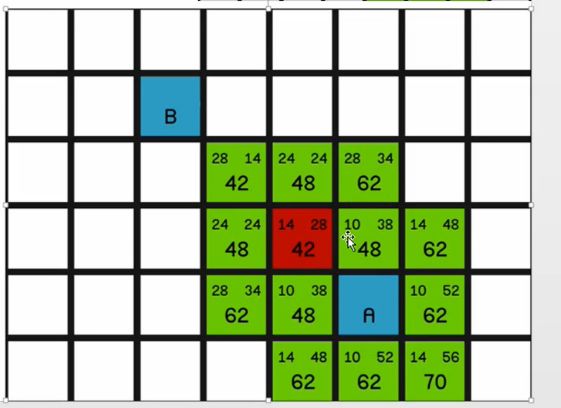
红色的是下一步的走法 F越低越近
开始搜索
1 把起始格添加到开启列表
2 寻找起点周围所有可到达或者可通过的方格,把他们加入开启列表
3 从开启列表中删除点A,把它加到一个“关闭列表”,列表中保存所有不需要再次检查的方格。
4 把当前格子从开启列表删除,然后添加到关闭列表。
5 检查所有相邻格子。跳过那些已在关闭列表的或者不可通过的,把他们添加进开启列表,把选中的方格作为新的方格的父节点。
6 如果某个相邻格已在开启列表里了,检查现在的这条路径G值是否更低,如果新G值更低,那就把相邻方格的父节点改为目前选中的方格,重新计算F.G值。
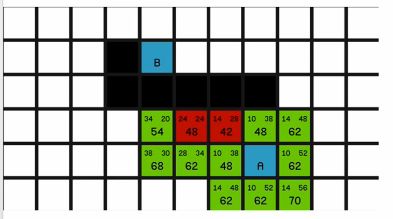

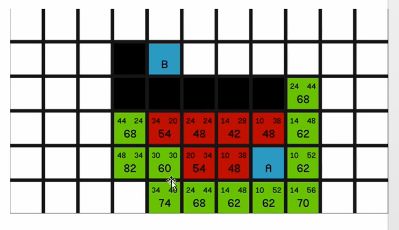

红色是选择过作为父节点的格子
总结
1 把起始格加入开启列表
2 重复如下
a 寻找开启列表中F值最低的格子。称当前格
b 把它切换到关闭列表
c 对相邻格中的每一个→
如果不可通过或已在关闭列表,略过。
反之
如果他不在开启列表,把他添加进去。把当前格作为父节点。记录这一格F.G.H值
如果他已经在开启列表,用G值参考检查新路径是否更好。更低的G值=更好的路径。如果这样,把这一格设为父节点,重新计算这一格G.F值。
d停止,当你
没把目标添加进关闭列表,这时候路径已经被找到
没找到目标格,开启列表空了。这时候路径不存在。
3 保存路径。从目标格开始,沿着每一格的父节点移动直到回到起始格。
伪代码实现
List开启
List关闭
把开始点加入开启集合
循环:
当前点=开启集合中最小F_Cost的点
把当前点移出开启集合
将当前点添加到关闭集合
如果当前是目标点,结束查询
遍历当前点的每个相邻点
如果相邻点不能访问或者相邻点在关闭集合中,跳过相邻点
如果新路径到相邻点距离更短,或者相邻点不在开启集合中
重新设置F_Cost
重新设置当前点为父节点
如果相邻点不在开启集合中
添加相邻点到开启集合中
以下是可以运行的源码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Node{
///
/// 是否可以通过此路径
///
public bool _canWalk;
///
/// 保存节点位置
///
public Vector3 _worldPos;
///
/// 整个网格的索引
///
public int _gridX, _gridY;
public int gCost;
public int hCost;
public int fCost
{
get { return gCost + hCost; }
}
public Node parent;
public Node(bool _canWalk, Vector3 _worldPos, int _gridX, int _gridY)
{
this._canWalk = _canWalk;
this._worldPos = _worldPos;
this._gridX = _gridX;
this._gridY = _gridY;
}
}
using System;
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Grid : MonoBehaviour
{
Node[,] grid;
///
/// 保存网格大小
///
public Vector2 gridSize;
///
/// 节点半径
///
public float nodeRadius;
///
/// 节点直径
///
float nodeDiameter;
///
/// 射线图层
///
public LayerMask WhatLayer;
public Transform player;
///
/// 每个方向网格数的个数
///
public int gridCntX, gridCntY;
///
/// 保存路径列表
///
public List path = new List();
// Use this for initialization
void Start()
{
nodeDiameter = nodeRadius * 2;
gridCntX = Mathf.RoundToInt(gridSize.x / nodeDiameter);
gridCntY = Mathf.RoundToInt(gridSize.y / nodeDiameter);
grid = new Node[gridCntX, gridCntY];
CreateGrid();
}
private void CreateGrid()
{
Vector3 startPoint = transform.position - gridSize.x * 0.5f * Vector3.right
- gridSize.y * 0.5f * Vector3.forward;
for (int i = 0; i < gridCntX; i++)
{
for (int j = 0; j < gridCntY; j++)
{
Vector3 worldPoint = startPoint + Vector3.right * (i * nodeDiameter + nodeRadius)
+ Vector3.forward * (j * nodeDiameter + nodeRadius);
//此节点是否可走
bool walkable = !Physics.CheckSphere(worldPoint, nodeRadius, WhatLayer);
//i,j是二维数组的索引
grid[i, j] = new Node(walkable, worldPoint, i, j);
}
}
}
public Node GetFromPos(Vector3 pos)
{
float percentX = (pos.x + gridSize.x * 0.5f) / gridSize.x;
float percentY = (pos.z + gridSize.y * 0.5f) / gridSize.y;
percentX = Mathf.Clamp01(percentX);
percentY = Mathf.Clamp01(percentY);
int x = Mathf.RoundToInt((gridCntX - 1) * percentX);
int y = Mathf.RoundToInt((gridCntY - 1) * percentY);
return grid[x, y];
}
void OnDrawGizmos()
{
//画出网格边缘
Gizmos.DrawWireCube(transform.position, new Vector3(gridSize.x, 1, gridSize.y));
//画不可走网格
if (grid == null)
return;
Node playerNode = GetFromPos(player.position);
foreach (var item in grid)
{
Gizmos.color = item._canWalk ? Color.white : Color.red;
Gizmos.DrawCube(item._worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
//画路径
if (path!=null)
{
foreach (var item in path)
{
Gizmos.color = Color.black;
Gizmos.DrawCube(item._worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
//画玩家
if (playerNode != null && playerNode._canWalk)
{
Gizmos.color = Color.cyan;
Gizmos.DrawCube(playerNode._worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
public List GetNeibourhood(Node node)
{
List neibourhood = new List();
//相邻上下左右格子
for (int i = -1; i <= 1; i++)
{
for (int j = -1; j <= 1; j++)
{
if (i == 0 && j == 0)
{
continue;
}
int tempX = node._gridX + i;
int tempY = node._gridY + j;
if (tempX < gridCntX && tempX > 0 && tempY > 0 && tempY < gridCntY)
{
neibourhood.Add(grid[tempX, tempY]);
}
}
}
return neibourhood;
}
}
using System;
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class FindPath : MonoBehaviour
{
public Transform player, EndPoint;
Grid grid;
// Use this for initialization
void Start()
{
grid = GetComponent();
}
// Update is called once per frame
void Update()
{
FindingPath(player.position, EndPoint.position);
}
void FindingPath(Vector3 StarPos, Vector3 EndPos)
{
Node startNode = grid.GetFromPos(StarPos);
Node endNode = grid.GetFromPos(EndPos);
List openSet = new List();
HashSet closeSet = new HashSet();
openSet.Add(startNode);
while (openSet.Count > 0)
{
Node currentNode = openSet[0];
for (int i = 0; i < openSet.Count; i++)
{
if (openSet[i].fCost < currentNode.fCost || openSet[i].fCost == currentNode.fCost && openSet[i].hCost < currentNode.hCost)
{
currentNode = openSet[i];
}
}
openSet.Remove(currentNode);
closeSet.Add(currentNode);
if (currentNode == endNode)
{
GeneratePath(startNode,endNode);
return;
}
//判断周围最优节点
foreach (var item in grid.GetNeibourhood(currentNode))
{
if (!item._canWalk || closeSet.Contains(item))
continue;
int newCost = currentNode.gCost + GetDistanceNodes(currentNode, item);
if (newCost path = new List();
Node temp = endNode;
while (temp!=startNode)
{
path.Add(temp);
temp = temp.parent;
}
//列表反转
path.Reverse();
grid.path = path;
}
int GetDistanceNodes(Node a, Node b)
{
int cntX = Mathf.Abs(a._gridX - b._gridY);
int cntY = Mathf.Abs(a._gridY - b._gridX);
if (cntX > cntY)
{
return 14 * cntY + 10 * (cntX - cntY);
}
else
{
return 14 * cntX + 10 * (cntY - cntX);
}
}
}
运行效果
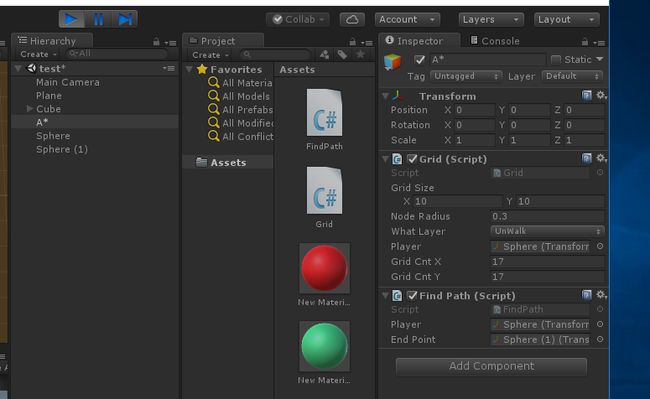
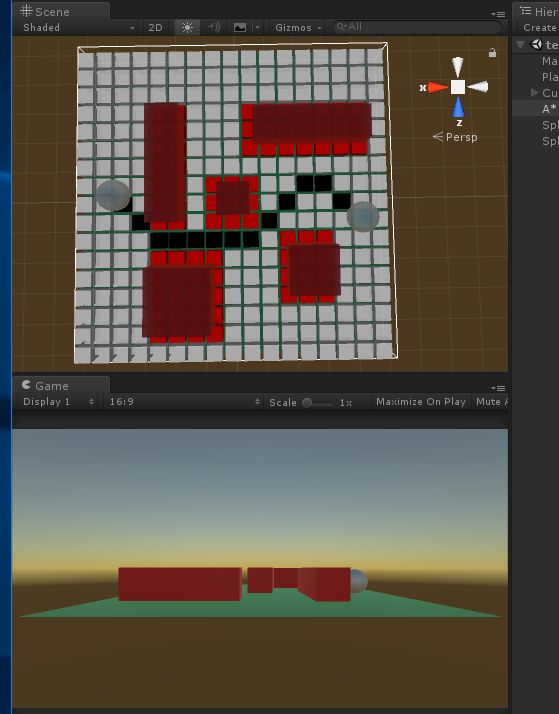
这个算是个基本实现 图中可看出明明可以直线走却走斜线 同时4格两点之间直线最短
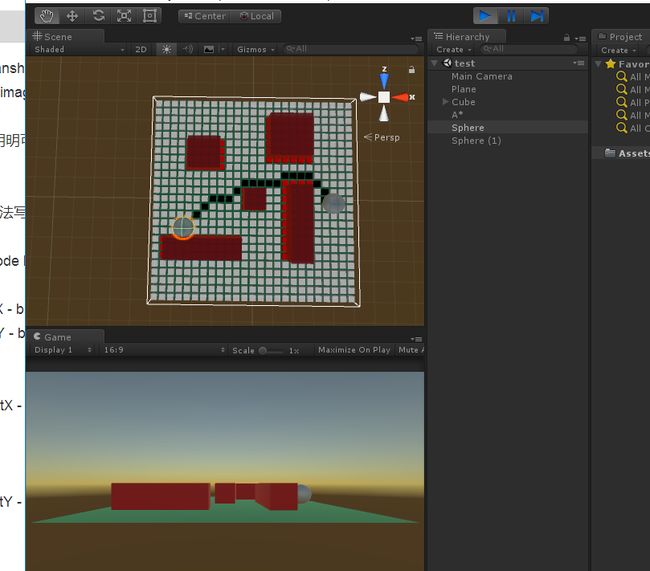
之后改良 发现是最后的对角线算法写反了
int GetDistanceNodes(Node a, Node b)
{
//估算权值,对角线算法 看在X轴还是Y轴格子数多 可计算斜移动
int cntX = Mathf.Abs(a._gridX - b._gridX);
int cntY = Mathf.Abs(a._gridY - b._gridY);
if (cntX > cntY)
{
return 14 * cntY + 10 * (cntX - cntY);
}
else
{
return 14 * cntX + 10 * (cntY - cntX);
}
//曼哈顿算法
//return Mathf.Abs(a._gridX - b._gridX) * 10 + Mathf.Abs(a._gridY - b._gridY) * 10;
}
https://blog.csdn.net/denghecsdn/article/details/78778769
这个全面讲解A*