最近在做双目视差估计算法,在OpenCV里有一些算法,其中半全局块匹配(Semi-Global Block Matching,SGBM)算法具有视差效果好速度快的特点,因此常常被广泛应用。本文主要讨论的就是SGBM算法。OpenCV的SGBM算法主要参考了《Stereo Processing by Semiglobal Matching and Mutual Information》这篇论文。
1. 计算每个像素点的代价
原论文使用的方法是利用互信息熵,而OpenCV使用的是Birchfield和Tomasi的方法(参照《Depth Discontinuities by Pixel-to-Pixel Stereo》)。这里我们分别介绍一下。
1.1 利用互信息熵
所谓的熵,是用来表示随机变量的不确定性,熵的值越大,信息的不确定性也越大。熵H和互信息MI的定义分别如下:
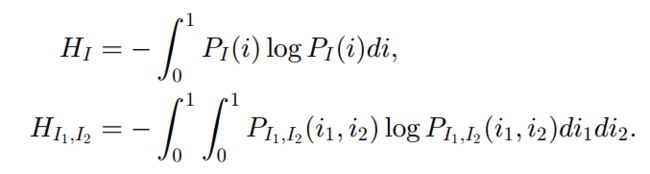

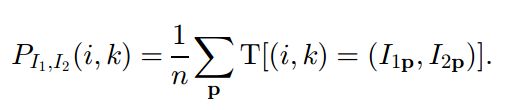
其中,PI代表某个点i的概率分布,也就是灰度直方图为i的点出现的概率;对应地,PI1,I2就是两个图对应点i1和i2的联合概率分布,也就是:

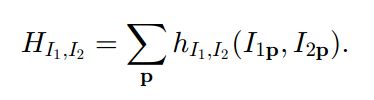
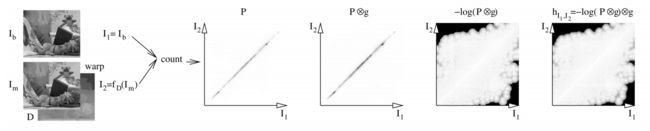
Kim等人将上式做了一个改进:利用泰勒展开把HI1,I2的计算转化为求和问题(参见论文《Visual Correspondence Using Energy Minimization and Mutual Information》)。

其中圈中带叉表示卷积运算,g(i,k)为高斯卷积核。
相应地,边缘熵以及边缘概率的计算如下:

这样的话,互信息的定义为:

MI匹配代价CMI为:

其中q是点p在视差为d的情况下的对应校正点。
原作者使用分层互信息(HMI)进行计算,每一层尺寸减少一半。单次计算的时间复杂度是O(WHD),即width×height×disparity range,所以上次迭代将会是当前迭代速度的1/8。
这里1/163要乘3的原因是小尺寸的随机视差图不靠谱,需要迭代3次。我们可以看到,相比于后文的BT方法仅仅慢了14%
1.2 Birchfield和Tomasi的方法(简称BT方法)
对于一个匹配序列M,其代价函数γ(M)表示匹配结果不准确的程度,其值越小越好。


其中,κocc表示未匹配的惩罚项(constant occlusion penalty),κr表示匹配的奖励项,Nocc和Nr分别表示未匹配和匹配的点数。
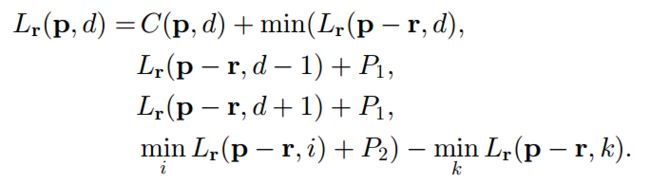
2. 损失聚合
我们为视差设置一个能量函数E(D)
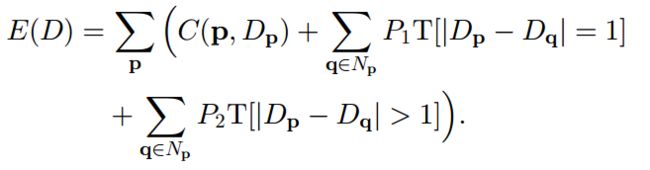
其中P1和P2分别表示视差差值为1和视差差值大于1的惩罚系数,一般P1
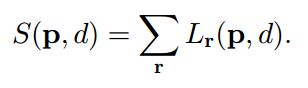
选取使代价聚合最小的视差值mindS[emb(q,d),d]即可。
3. OpenCV相关函数的使用
我们看一下stereoSGBM类的参数。
static Ptr cv::StereoSGBM::create (int minDisparity = 0,
int numDisparities = 16,
int blockSize = 3,
int P1 = 0,
int P2 = 0,
int disp12MaxDiff = 0,
int preFilterCap = 0,
int uniquenessRatio = 0,
int speckleWindowSize = 0,
int speckleRange = 0,
int mode = StereoSGBM::MODE_SGBM
)
- minDisparity:最小的视差值。
- numDisparity:视差范围,即最大视差值和最小视差值之差,必须是16的倍数。
- blockSize:匹配块大小(SADWindowSize),必须是大于等于1的奇数,一般为3~11 。
- P1,P2:惩罚系数,一般:P1=8*通道数*SADWindowSize*SADWindowSize,P2=4*P1
- disp12MaxDiff :左右视差图的最大容许差异(超过将被清零),默认为 -1,即不执行左右视差检查。
- preFilterCap:预滤波图像像素的截断值。该算法首先计算每个像素的x导数,并通过[-preFilterCap,preFilterCap]间隔剪切其值。结果值被传递给Birchfield-Tomasi像素成本函数。
- uniquenessRatio:视差唯一性百分比, 视差窗口范围内最低代价是次低代价的(1 + uniquenessRatio/100)倍时,最低代价对应的视差值才是该像素点的视差,否则该像素点的视差为 0,通常为5~15.
- speckleRange:视差变化阈值。
- mode:模式
简单地试了一下:
#include "stdafx.h"
#include
#include
#include
#include
#include
using namespace cv;
int main(int argc, char** argv) {
//读入图像。
Mat left = cv::imread("left.png");
Mat right = cv::imread("right.png");
if (left.empty() || right.empty()) {
std::cout << "could not load image...\n";
return -1;
}
//图像转灰度
cv::cvtColor(left, left, CV_BGR2GRAY);
cv::cvtColor(right, right, CV_BGR2GRAY);
//设置参数
int numberOfDisparities = 48, SADWindowSize = 11;
int uniquenessRatio = 15, speckleWindowSize = 50, speckleRange = 32;
cv::Ptr sgbm = cv::StereoSGBM::create(0, numberOfDisparities, SADWindowSize);
int cn = left.channels();
sgbm->setP1(8 * cn * SADWindowSize * SADWindowSize);
sgbm->setP2(32 * cn * SADWindowSize * SADWindowSize);
sgbm->setPreFilterCap(63);
sgbm->setUniquenessRatio(uniquenessRatio);
sgbm->setSpeckleWindowSize(speckleWindowSize);
sgbm->setSpeckleRange(speckleRange);
sgbm->setDisp12MaxDiff(1);
//计算并显示视差
Mat disp;
sgbm->compute(left, right, disp);
disp.convertTo(disp, CV_8U, 255 / (numberOfDisparities*16.)); //将16位符号整形的视差矩阵转换为8位无符号整形矩阵
cv::imshow("disparity", disp);
cv::waitKey();
return 0;
}

参考资料
- Heiko Hirschmuller “Stereo Processing by Semiglobal
Matching and Mutual Information ”[M].IEEE,2005 - S. Birchfield and C. Tomasi, “Depth Discontinuities by Pixel-toPixel Stereo,” Proc. Sixth IEEE Int’l Conf. Computer Vision, pp. 1073-
1080, Jan. 1998. - cv::StereoSGBM Class Reference
- OpenCV学习笔记(18)双目测距与三维重建的OpenCV(三)立体匹配与视差计算
- Stereo Matching文献笔记之(九):经典算法Semi-Global Matching(SGM)之神奇的HMI代价计算~
- Stereo Matching文献笔记之(十):经典算法Semi-Global Matching(SGM)之碉堡的动态规划~
- Semi-Global Matching(SGM)算法原文理解