旋转变换的指数形式
用单位向量$\hat{\omega}$代表旋转轴,以及$\theta$代表绕该轴的旋转角度。则可以用三维向量$\hat{\omega}\theta\in\mathbb{R}^3$以指数形式来描述旋转。如果将$\hat{\omega}$和$\theta$分开描述,即为Axis-Angle形式。用$\hat{\omega}\theta$来描述旋转矩阵R可以有下面几种理解方法:
- 某坐标系初始与参考坐标系{s}重合,绕轴$\hat{\omega}$旋转$\theta$角度后当到达当前姿态,其相对于{s}的旋转矩阵为R。这种描述方法为 Axis–angle representation
- 角速度矢量$\hat{\omega}\theta$ 在参考坐标系{s}中描述,某坐标系初始与参考坐标系{s}重合,以角速度$\hat{\omega}\theta$转动,经过单位时间到达当前姿态(可由矩阵R表示)。
- 角速度矢量$\hat{\omega}$在参考坐标系{s}中描述,某坐标系初始与参考坐标系{s}重合,以角速度$\hat{\omega}$转动,经过$\theta$时间到达当前姿态(可由矩阵R表示)。
- Essential Results from Linear Differential Equations Theory
考虑下面的一阶线性微分方程:$$\dot{x}(t)=Ax(t)$$
其中,$x(t)\in\mathbb{R}^n$,$A\in\mathbb{R}^{n\times n}$是一个常量矩阵。若给出初始条件$x(0)=x_0$,则可得到微分方程的解为:$$x(t)=x_0e^{At}$$
矩阵指数$e^{At}$可以根据泰勒展开式来计算:$$e^{At}=I+At+\frac{(At)^2}{2!}+\frac{(At)^3}{3!}+...$$
如果矩阵$A$可以表达成$A=PDP^{-1}$,$P$为可逆矩阵,则有:
$$\begin{align*} e^{At}&=I+At+\frac{(At)^2}{2!}+\frac{(At)^3}{3!}+...\\
&=I+(PDP^{-1})t+(PDP^{-1})(PDP^{-1})\frac{t^2}{2!}+...\\
&=P(I+Dt+\frac{(Dt)^2}{2!}+...)P^{-1}\\
&=Pe^{Dt}P^{-1}
\end{align*}$$
更进一步,如果$A$可以对角化,即$D$是对角矩阵:$D=diag\{d_1,d_2,...,d_n\}$,则$e^{Dt}$可以很方便的计算:
$$e^{Dt}=\begin{bmatrix}
e^{d_1t} & 0 & \cdots & 0 \\
0 & e^{d_2t} & \cdots & 0 \\
\vdots & \vdots & \ddots &\vdots \\
0 & 0 & \cdots & e^{d_nt}
\end{bmatrix}$$
- Exponential Coordinates of Rotations
参考下图中的描述,假设三维向量$p(0)$绕着转轴$\hat{\omega}$旋转$\theta$度后到达$p(\theta)$。用$p(t)$代表$t$时刻向量$p$的位置,则该过程也可以描述为:$p(0)$以角速度$\hat{\omega}$旋转($\hat{\omega}$为单位角速度),从$t=0$运动到$t=\theta$。
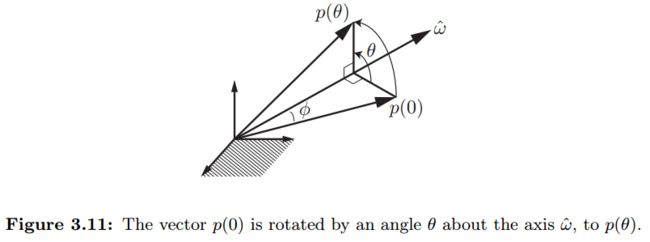
旋转时的速度可用$\dot{p}$来描述,且有:$$\dot{p}=\hat{\omega}\times p$$
用斜对称矩阵$[\hat{\omega}]$可以将向量叉乘变为矩阵与向量乘法,因此上面的微分方程可写为:$$\dot{p}=[\hat{\omega}]p$$
若$\hat{\omega}=[\omega_x,\omega_y,\omega_z]^T$,定义斜对称矩阵$[\hat{\omega}]$:
$$[\hat{\omega}]=\begin{bmatrix}
0 & -\omega_z & \omega_y \\
\omega_z & 0 & -\omega_x\\
-\omega_y & \omega_x & 0
\end{bmatrix}$$
已知初始条件$p(0)$,该方程形式如前面研究过的$\dot{x}=Ax$,因此其解为:$p(t)=e^{[\hat{\omega}]t}p(0)$
由于变量$t$和$\theta$可互换,则上面方程可写为:$$p(\theta)=e^{[\hat{\omega}]\theta}p(0)$$
下面将$e^{[\hat{\omega}]t}$进行泰勒展开,计算斜对称矩阵$[\hat{\omega}]$的幂可得关系式:$[\hat{\omega}]^3=-[\hat{\omega}]$,利用这一关系我们可以将$[\hat{\omega}]^3$替换为$-[\hat{\omega}]$,$[\hat{\omega}]^4$替换为$-[\hat{\omega}]^2$,$[\hat{\omega}]^5$替换为$-[\hat{\omega}]^3$...于是可以得到:
$$\begin{align*} e^{[\hat{\omega}]\theta}&=I+[\hat{\omega}]\theta+[\hat{\omega}]^2\frac{\theta^2}{2!}+[\hat{\omega}]^3\frac{\theta^3}{3!}+...\\ &=I+(\theta-\frac{\theta^3}{3!}+\frac{\theta^5}{5!}-...)[\hat{\omega}]+(\frac{\theta^2}{2!}-\frac{\theta^4}{4!}-\frac{\theta^6}{6!}-...)[\hat{\omega}]^2\end{align*}$$
根据正弦和余弦函数的泰勒展开式:
$$\begin{align*} \sin\theta&= \theta-\frac{\theta^3}{3!}+\frac{\theta^5}{5!}-...\\
\cos\theta&=1-\frac{\theta^2}{2!}+\frac{\theta^4}{4!}-...\end{align*}$$
可以将上面公式进行简化。给定$\hat{\omega}\theta\in\mathbb{R}^3$,其中$\theta$为任意标量,$\hat{\omega}\in\mathbb{R}^3$且为单位向量。则根据$[\hat{\omega}]$、$\theta$进行旋转的旋转矩阵为:$$\boxed{Rot(\hat{\omega},\theta)=e^{[\hat{\omega}]\theta}=I+\sin\theta[\hat{\omega}]+(1-\cos\theta)[\hat{\omega}]^2}$$
该公式也称为Rodrigues’ formula(罗德里格斯公式) 。
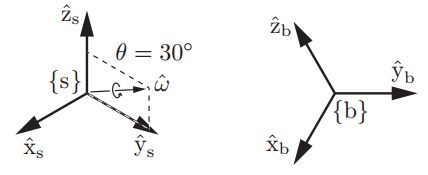
举个例子,下图中坐标系{b}相对于固定参考坐标系{s}的姿态可以描述为:初始时刻两坐标系一致,{b}绕单位向量$\hat{\omega_1}=(0,0.866,0.5)$旋转$\theta_1=30^°=0.524rad$后到达当前姿态。
则{b}相对于{s}的旋转矩阵可以计算为:
$$\begin{align*}
R&=e^{[\hat{\omega_1}]\theta_1}=I+\sin\theta_1[\hat{\omega_1}]+(1-\cos\theta_1)[\hat{\omega_1}]^2 \\
&=I+0.5\begin{bmatrix}0&-0.5&0.866\\0.5&0&0\\-0.866&0&0\end{bmatrix}+0.134\begin{bmatrix}0&-0.5&0.866\\0.5&0&0\\-0.866&0&0\end{bmatrix}^2\\
&=\begin{bmatrix}0.866&-0.250&0.433\\0.250&0.967&0.058\\-0.433&0.058&0.899\end{bmatrix}
\end{align*}$$
坐标系{b}的姿态可由矩阵$R$描述,或者由单位向量$\hat{\omega_1}=(0,0.866,0.5)$以及转角$\theta_1=0.524rad$来描述,即旋转矩阵R的指数坐标为$\hat{\omega_1}\theta_1=(0,0.453,0.262)$
在Mathematica中RotationMatrix函数可以根据转轴和转角计算旋转矩阵:

- Matrix Logarithm of Rotations
如果向量$\hat{\omega}\theta\in\mathbb{R}^3$表达了旋转矩阵R的指数坐标,则斜对称矩阵$[\hat{\omega}\theta]=[\hat{\omega}]\theta$是旋转矩阵R的对数。矩阵的对数是矩阵指数的逆:

当转角$\theta$不为$\pi$的整数倍时,可以根据旋转矩阵R计算出转轴:$$\begin{align*} \hat{\omega_x}=\frac{1}{2\sin\theta}(r_{32}-r_{23})\\\hat{\omega_y}=\frac{1}{2\sin\theta}(r_{13}-r_{31})\\\hat{\omega_z}=\frac{1}{2\sin\theta}(r_{21}-r_{12})\end{align*}$$
或表述为斜对称矩阵形式:$$[\hat{\omega}]=\begin{bmatrix}0&-\hat{\omega_z}&\hat{\omega_y}\\ \hat{\omega_z}&0&-\hat{\omega_x}\\-\hat{\omega_y}&\hat{\omega_x}&0 \end{bmatrix}=\frac{1}{2\sin\theta}(R-R^T)$$
具体推导和细节可参考:Modern Robotics: Mechanics, Planning, and Control 3.2.3.3 Matrix Logarithm of Rotations
参考:
物理引擎中的刚体转动2
四元数指数映射旋转参数化的实际应用
视觉SLAM中的数学基础 第二篇 四元数
视觉SLAM中的数学基础 第三篇 李群与李代数
李群与李代数 - part 2 指数与对数映射、李代数求导与扰动模型
Axis–angle representation
Rodrigues' rotation formula
Lie Groups for 2D and 3D Transformations
Modern Robotics: Mechanics, Planning, and Control 3.2.3 Exponential Coordinate Representation of Rotation
Lie groups, Lie algebras, projective geometry and optimization for 3D Geometry, Engineering and Computer Vision