摘要:随着对地观测技术、地理信息技术和计算机技术的快速发展,地理空间数据呈现出多源化、实时化和海量化等趋势,球面离散网格系统作为一种新的数字地球参考模型,它为多尺度、多源异构的地理空间数据集成提供了统一的框架。主要研究了球面离散网格系统为地理空间数据集成所提供的统一框架,并分别讨论了多尺度、多种格式和投影的地理空间数据的集成方法。通过特征归一化处理和构建地名索引服务,试图解决数据尺度不同所带来的挑战,实现海量地理空间数据的动态管理。
关键词:球面离散六角网格系统; 地理空间数据集成多尺度; 动态管理
引言
随着空间技术和信息技术的飞速发展,人类获取有关地理空间数据及各种资源环境数据的能力大大增强,这些数据呈现出多源化、异构化、动态化和海量化等趋势。在对全球海量数据进行表达和管理过程中,传统的平面数据模型存在投影种类多样、算法复杂等局限性,并且缺乏对全球多尺度空间数据的管理,难以满足对局部数据的快速更新。如何实现对多源异构的地理空间数据的高效集成与融合,并为地理空间数据挖掘、知识发现、地理空间分析、可视化及建模与仿真提供有效支撑,成为国内外地学专家普遍关注的热点问题。全球离散网格系统( Discrete Global Grid System,DGGs) 正是在这样的背景下提出的。
全球离散网格系统基本原理是将球面按一定规则递归剖分成形状、面积近似相等的格元,采用格元对应的唯一地址码代替地理坐标在球面上进行各种操作。其本质就是将地球表面进行规则划分,并构建地球表面的“电子表格”。相对于三角形、正方形和菱形来说,六边形具有空间覆盖率高、邻接关系一致等特点,因此,六边形网格更适合于地理空间数据的组织和管理。针对基于六边形的全球离散网格系统的基础理论,国内外相关学者都做了深入的研究,并取得了许多成果。本文主要针对基于全球离散六角网格系统的多尺度、多源、多种格式和投影的地理空间数据的集成方法进行讨论。
1、网格剖分及格元编码规则
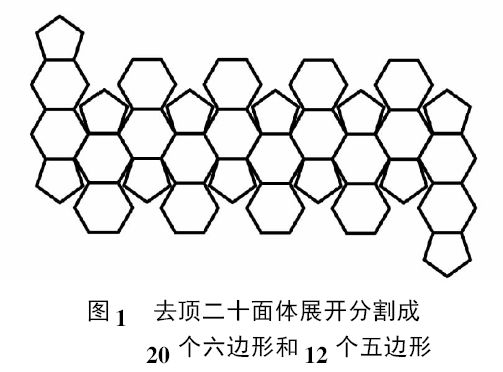
ISEA3H 是指孔径为3 的、基于施耐德等积二十面体投影的全球离散六角网格系统,Kevin Sahr 等指出ISEA3H 是一个相对优化的基于多面体的全球离散网格系统[2]。PYXIS 是由PYXIS Innovation 公司开发的基于ISEA3H 的全球离散网格系统,选择去顶二十面体作为理想多面体,球体首先被分割成20 个六边形和12 个五边形,然后将球体展开成平面,如图1 所示。
设h 是第n 层网格中心为x 的任意六角格,则在第n+ 1 层存在一个格点中心同样为x 的六角格h’,称h’为h的中心子单元。在第n + 2 层存在6 个六边形h1,h2,…,h6,格元中心位于h’的6 个顶点上,称这些六边形为顶点子单元。依此递归定义,就在PYXIS 格元中形成了一个树状数据结构。
在PYXIS 编码空间中,所有的格元都对应唯一一个地址码,这个地址码是由集合{ 0,1,2,3,4,5,6} 中的数字构成的字符串。A. Vince 给出了网格Pn 中格元a 的地址码的标准格式:

图2 描述了PYXIS 瓦片中P1,P2,P3 的格元地址码。结合去顶二十面体中基础面片的编码,可以得到球面空间中格元的地址码,具体形式如下:
AN - NNNNNNNNNN
其中,AN 是字母数字,既可以表示字母也可以表示数字,表示标准的PYXIS 编码。使用A - T 共20 个字母标识20 个六边形,01 - 12 共12 个数字标识12 个五边形。例如,3- 02001040401040 表示由五边形剖分得到的第14层格元地址码,而E - 20406050105040403020305010 表示由六边形剖分得到的第26 层格元地址码。
2、参考系与投影变换
地图作为地球空间信息的载体已经有数千年的历史,计算机的出现促使人们采用“数字化”的方法管理地图数据,于是出现了用离散且具有拓扑关系的点串描述的各种空间要素、用规则的矩形网格描述的影像信息( 李德仁等, 2003) 。但这只是存储介质的改变,地理空间信息的数据模型并未改变,通过地图投影把球面数据变换到平面处理的模式一直沿用至今。
正是参考系与投影方式的不同,为多源的地理空间数据集成带来了巨大挑战。因此,在进行地理空间数据集成时,首先需要进行参考系和投影的变换。全球离散网格系统由于是面向全球进行地理空间数据集成,因此,只在局部区域与真实地球较为接近的参心坐标系不能够满足需求,必须采用地心坐标系。由于基于多面体的全球离散网格系统是球面网格,而非椭球面网格,可以采用固定半径的地心球体,目前普遍应用的是WGS84 参考椭球,设定其地球半径为6 371. 008 771 4 km。
对于许多实际应用来说,等面积的网格或是对地球表面的等面积划分具有重要的意义。John Snyder 提出的投影方法能够满足这一基本要求———使用面积相等的格元覆盖整个地球表面。因此,在构建ISEA3H 全球离散网格系统过程中选择了Snyder 二十面体等积投影。
3、多格式地理空间数据集成
全球离散网格系统具有离散性、多分辨率、等积性和固定性等特征,这为基于位置的地理空间数据集成提供了统一的框架。目前,常用的地理空间数据结构主要有矢量、栅格和DEM 等,因此在对多种格式的地理空间数据集成时,本文着重考虑了这三种格式的数据集成。
通过数据网格化处理,可以将这三种格式的数据处理到统一的参考模型中,这也就使得地理空间数据具有了聚合解聚的特性。为了保留源数据的原始信息,可以采用密集采样的方法对源数据进行网格化处理,这就确保了全球离散网格系统中格元编码与传统地理坐标系的双向无误差转换,实现历史数据的延续使用。
3.1 矢量数据网格化
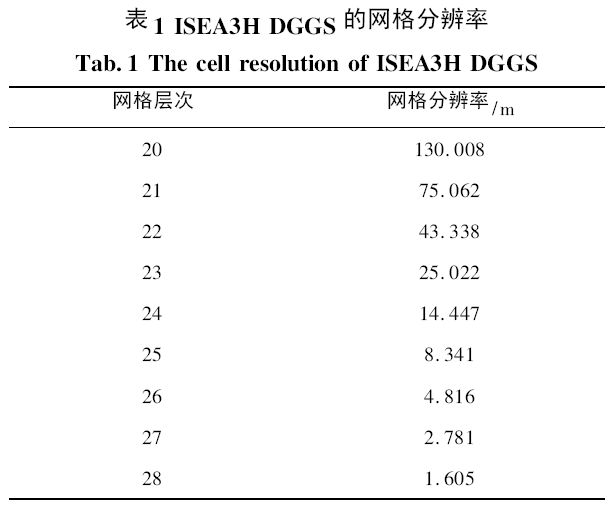
矢量数据的网格化需要根据矢量数据的精度选择不同的网格分辨率,这样才能够保留源数据的精度。基于ISEA3H 的全球离散网格系统的网格分辨率见表1。以我国系列比例尺地形图为例,1∶ 1 000 000 的地图精度为100 m,而ISEA3H 全球离散网格系统中第20 层网格分辨率为130 m、第21 层分辨率为75 m,因此,选择第21 层的网格进行矢量数据网格化。
在进行矢量数据网格化过程中,需要使用高效的网格地址码与经纬度坐标的相互转换算法。对于矢量数据中的点状、线状和面状实体,需要分别使用全球离散网格系统中的实体表达模型进行描述。
点状要素可以直接使用定位点所在格元的地址码进行描述。
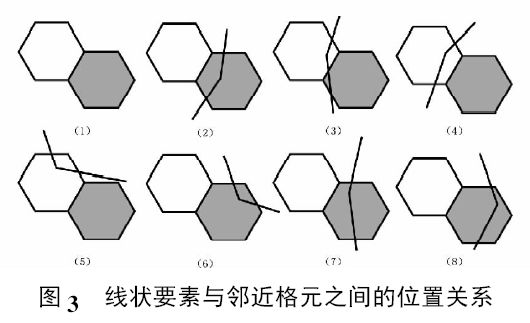
线状要素则需要使用一组有序的格元地址码集合进行描述。线状要素的网格化可以分为以下八种情况,如图3 所示。
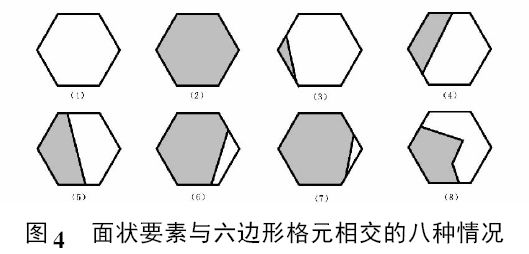
面状要素的描述与传统的基于经纬度坐标的表达方式类似,同样分为边界与内部两个部分。边界的表达模型与线状要素相同,要素内部的表达模型则直接记录所有内部格元的地址码。面状要素的网格化可以分为以下八种情况,如图4 所示。
在完成矢量数据网格化之后,还需要对网格化的精度进行评估,以提高网格化数据的可用性。
3.2 栅格数据网格化
栅格数据本质上就是网格化的数据,遥感影像作为重要的数据源,在地理空间数据中占有重要的地位。目前大多数的遥感影像都是基于矩形格元的像素集合,而欧洲对地观测委员会( The Committee on Earth ObservationSystem,CEOS) 于2009 年发射了一颗SMOS 卫星,其传感器是六边形矩阵,获取的影像可以直接定位在ISEA3H 全球离散网格上。
根据Nyquist - Shannon 采样定理,可以将基于矩形网格的遥感影像原始数据通过密集采样归一化到ISEA3H全球离散网格中。为了保留原始的影像信息,需要选择最优的网格分辨率和采样方法。有两种方法可以保留原始信息: 保留格元总数、保留格元数值。
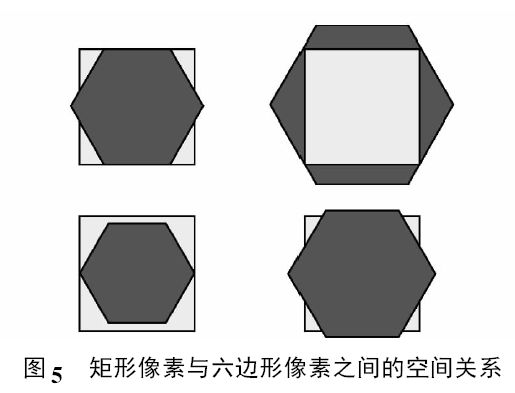
矩形像素与六边形像素之间是不同类型的像素之间的空间关系,所以仅仅通过格点之间的关系进行描述是不充分的,还需要描述格元之间的空间关系。当不同类型的像素中心点相匹配并且格元的尺寸比较接近时,像素之间的关系可能存在四种不同情况,如图5 所示。
为了使采样变形最小化并尽可能多地保留原始影像信息,可以使用等积采样方法,并结合恰当的采样滤波分析技术,在两种类型的像素之间进行转换。
滤波技术对于保持两类不同类型的坐标系统之间转换的质量十分必要。不同的滤波技术应用于不同的目的。目前,存在三类基础的常见的滤波算法: 最邻近方法( nearest neighbour) 、双线性方法( bilinear) 和双三次( bi -cubic) 方法。当矩形网格空间系统转换到六角网格系统时,两个系统中各个格元的中心点并不能精确地匹配。如何确定输出数值对于转换质量十分重要。
3.3 DEM 数据网格化
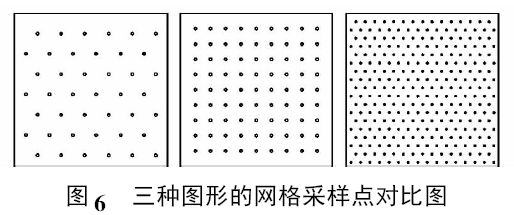
DEM 数据是描述地形起伏的一种有效方法,也是目前各种地形分析的基础。DEM 数据本质上也属于栅格数据,但其网格化只需要对DEM 数据点进行采样处理。能够组成平面的三种基本图形: 三角形、四边形和六边形,当网格分辨率相同时,六边形网格的采样点数目最多,采样精度最高。当网格单元的分辨率相同时,即网格单元面积相等,正三角形、正四边形和正六边形网格在同一区域内的采样点如图6 所示。
为了保留DEM 数据的原始精度,同样需要选择合适的网格分辨率。通过格点内插算法,获得六边形格元六个格点及中心点的高程值。插值的效率与精度对于DEM数据网格化来说同样重要。
4、多尺度地理空间数据集成
在地理空间数据集成中,多尺度数据带来了重大的挑战。在全球离散网格系统的统一参考框架下,不同尺度的地理空间数据对应着不同分辨率层次的网格,而全球离散网格系统具有的多分辨率特性能够很好地支持对多尺度的地理空间数据集成,这使得全球离散网格系统能够支持对地球表面任意位置地理空间信息从源数据精度层次进行网格化编码,从而与已经网格化的数据保持一致。
ISEA3H 全球离散网格系统的构建是通过对去顶二十面体进行次等积递归剖分得到的,因此,可以通过聚合的方式由高分辨率的底层数据得到低分辨率的顶层数据。根据参与聚合的子节点的层次和个数,可以将聚合分为以下三种方法,即7 格元法、13 格元法和31 格元法,聚合示意图如图7 所示。

每一种聚合方法聚合的效率和精度都有所不同,需要对聚合效率和精度进行进一步的研究。
5、结束语
ISEA3H 全球离散网格系统是具有离散性、多分辨率性、等积性和固定性等特征的地球网格,它为基于位置的地理空间数据集成和融合提供了统一的参考框架。全球离散网格系统的瓦片结构和索引机制为多源地理空间数据挖掘、知识发现、高保真可视化、地理空间分析、图像处理、仿真和建模等提供了高效的数据分发、处理、重用和管理方法。
地理空间数据网格化是进行数据集成的基础,网格化的精度和效率是网格化过程中需要着重考虑的问题。全球离散网格系统的多分辨率层次结构为多尺度的地理空间数据集成提供了有利支撑。