1. 信号与系统
1.1 序言
实话说,我之前对信号系统一窍不通,但因为工作需要不得不学习它的基础知识。快餐式的学习又不是我的性格,于是就上手了奥本海姆的两本大部头经典,经过一番死磕,总算是把基本内容梳理完了。由于完全没有实战经验,我对信号系统的理解还很浅薄,加上所需数学知识还没有准备完善,学习过程中总是心里没底。但整理过程中,我仍然试图去了解问题的本质,即便有很多猜测和自以为的成分,却已是尽量做到逻辑完整、自洽。
信号学的内容比较多,以它为基础的延伸学科已然在各领域开枝散叶,比如语音信号处理和图形信号处理,都是如今AI某些分支的理论基础。万丈高楼平地起,本系列博客只打算学习经典信号学的基本概念和结论,更高阶的信号处理方法将放到《现代信号处理》专题里讨论。鉴于本人理论先行的习惯,打算还是先对连续信号建立较完整的理论,后面再集中讨论离散信号的不同、以及具体的处理策略,与奥本海姆的并行策略不同。
信号系统虽是一门应用学科,但就其理论体系而言,却是独立于具体的技术场景之外的。所以这里我也将不拿具体场景为例,而是把它当成一门纯粹的应用数学和算法设计课程来看待,注意力仍然集中在对讨论对象的定义、性质方法的推导、直至计算机的算法实现。教材虽厚,但大部分都是例题和习题,其实真正的理论部分内容有限。建议先粗略了解梗概,再细致推演细节,有数学基础的朋友甚至可以尝试自己“顺水推舟”,可能比直接看书更快、更深刻。
1.2 信号
课程名称就已经把它研究的对象概况清楚了:“信号”和“系统”。但我们肯定没法讨论任意的信号和系统,而只能针对某些广泛存在的、具有明确特征的信号与系统。具体而言,这里讨论的信号都可以抽象为一个实数域上的函数\(x(t)\)。由于大部分信号都体现出时序性,故这里的自变量也就用代表时间的\(t\)表示,但在讨论时还是仅作为一般的实(复)函数看待。
既然是一般实数域函数,那些我们已经熟知的函数性质和变换,这里就不赘述了。只是在信号系统中,它们有着更应景的名称,比如式(1)中的信号分别称为对信号\(x(t)\)的时移、时间反转、时间尺度变换。而更一般地,信号\(x(\alpha t+\beta)\)是对原信号时间轴的线性变换,想必你已经清楚它跟原信号之间的关系。
\[x(t-t_0);\;\;x(-t);\;\;x(kt)\tag{1}\]
还有类似偶信号、奇信号、周期信号的定义也都是简单直观的,其中周期信号满足\(x(t)=x(t+T)\),它时移\(T\)后能与原信号重合。不难看出\(kT\)(\(k\)为整数)都是它的周期,而函数最小的周期被称为基波周期。但要注意,并不是所有的函数都有最小周期,比如常数函数、比如狄利克雷函数(有理数值为1、无理数处值为0)。教材里说除了常数函数都有基波周期,个人认为有误。
1.3 系统
“系统”被视为一个过程,它以一些信号作为输入,并以一定特征输出另一些信号。这样的描述和函数的定义并无本质差别,所以一个信号系统其实是一个广义的函数,只不过它的自变量和因变量都是实变量函数。相当一部分系统其实只有一个输入输出,故今后提到的系统都是指单输入输出系统\(x(t)\to y(t)\)。另外,简单的小系统可以通过综合运算,组合成更大的系统,这样的分拆思想是研究复杂系统的关键方法。
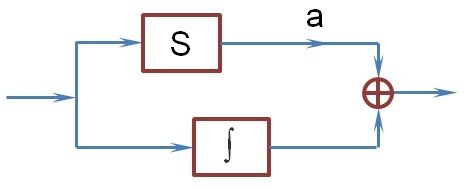
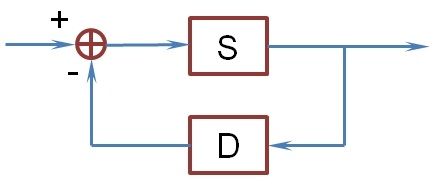
方框图可以为复杂系统提供直观的表示,图中的子系统一般用方框表示,像常用的积分、微分一般直接用\(\int,D\)表示。更简单的乘常数系统,可以直接在箭头上标出系数\(a\)。加法器\(\bigoplus\)是方框图中的常用部件,它一般用作多个系统的并联。相应地,复合系统\(S2(S1(x(t)))\)称为系统的串联或级联。右图中由两个子系统和一个加法器组成的系统也很常见(D系统的输出一般为负因子),它被称为反馈互联。
确定系统特性,是分析或设计系统之前必须做的事情。而且针对普遍特性的研究,才更容易有理论结果和实用价值,这里先介绍几个常见的系统特性。首先对一般的有界函数\(x(t)\),总希望系统的输出\(y(t)\)也是有界的,这样的系统称为稳定的。以时间为自变量的系统中,往往\(y(t_0)\)的值与\(x(t)\)的\(t_0\)时刻之后的值无关,这样的系统叫因果系统。如果\(y(t_0)\)仅仅与\(x(t_0)\)有关,它也叫无记忆系统。以上几个系统性质比较符合经验特性,但一定程度上限制了系统的处理范围,对更广义的系统不一定成立,故今后不作为默认性质。真正对系统分析有用的,其实是下面要介绍的两个性质。
对输入信号最简单的变换,无非就是时移和叠加,很多重要系统对这些变换仍然有“不变”的输出。首先我们希望系统的输出不受输入信号时移的影响,即如果\(x(t)\to y(t)\),那么\(x(t-t_0)\to y(t-t_0)\)。输出函数随输入函数一起时移,这样的系统称为时不变的。线性组合是信号的最简单复合,如果系统还能满足式(2),它就被称为线性系统。线性时不变系统普遍存在,而且它还有着非常完善的理论成果,因此本系列把线性时不变系统(LIT)作为默认系统,并透彻讨论它的特性。但要注意:在对陌生系统做分析时,一定要先确认它是LIT系统。
\[x_1(t)\to y_1(t);\;x_2(t)\to y_2(t)\;\;\Rightarrow\;\;ax_1(t)+bx_2(t)\to ay_1(t)+by_2(t)\tag{2}\]
2. LIT系统
2.1 单位冲激函数
为了得到LIT系统的一般表征,还是要结合“时不变”和“线性”两大特性,对任意输入\(x(t)\)作一个线性拆解。设\(\Delta(t-t_0)\)是仅在\(t_0\)处有非零值\(1\)的函数,则\(x(t)\)就是所有函数\(x(t_0)\Delta(t-t_0)\)的叠加(\(t_0\)取遍所有实数)。进而如果\(\Delta(t)\)的响应函数为\(Y(t)\),那么\(x(t)\)的响应函数\(y(t)\)便是所有函数\(x(t_0)Y(t-t_0)\)的叠加。
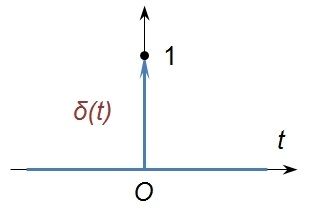
由于\(t_0\)取遍所有实数,“累加”的确切意义便是积分,以下先把\(t_0\)视为连续变量并重新记为\(\tau\)。现在需要构造一个等价于\(\Delta(t-\tau)\)的微分\(\delta(t-\tau)\,\text{d}\tau\),也就是说微分仅在\(\tau=t\)处有非零值\(1\),那就要求\(\delta(t-\tau)\)在\(t\)处有无穷大值且积分(面积)为\(1\)。为此需要定义一个满足式(3)的特殊的函数\(\delta(t)\),它被称为单位冲激函数,坐标系中往往以一个单位长度的向上向量表示(左图)。在此定义下,\(x(t)\)便有了如式(4)积分表达式。
\[\delta(t)=\left\{\begin{matrix}\infty,&(t=0)\\0,&(t\ne 0)\end{matrix}\right.,\;\;\int_{-\infty}^{\infty}\delta(t)\,\text{d}t=1\tag{3}\]
\[x(t)=\int_{-\infty}^{\infty}x(\tau)\delta(t-\tau)\,\text{d}\tau\tag{4}\]
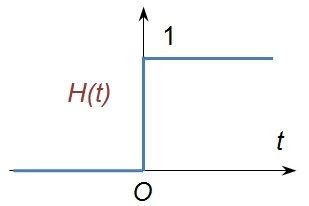
教材上一般会用函数列的极限来解释\(\delta\)函数,但我们心里明白,式(3)的定义有严重的逻辑缺陷,一个值为无穷大的函数根本不能算作函数。这样的问题在工科教材上是无法解释清楚的,因为透彻地理解\(\delta(t)\)还需要《实变函数》和《泛函分析》的知识。在那里它叫狄拉克\(\delta\)函数,它是一个线性泛函,具体说是满足\(\delta(\text{d}t)=\text{d}H(t)\)的一个测度,其中\(H(t)\)是右图的Heviside阶梯函数。
\(\delta(t)\)的严格定义是满足式(4)的泛函,注意这里的函数已经不是一般意义的函数,甚至积分(勒贝格积分)也不是一般意义的积分(黎曼积分)。另外,还可以把\(\delta(t)\)看成一个广义的分布函数,这其实是对本课程非常适合的角度。相比一般函数,它们被称为奇异函数,数学上已经严格证明,奇异函数和常规函数之间可以正常进行四则运算以及微积分,而且计算的结果与直观的理解是一致的,以后可以放心使用。
2.2 LIT的分解
有了式(4)对输入信号\(x(t)\)分解,就可以继续讨论系统的输出。在微分意义下,把响应\(Y(t-\tau)\)写作\(h(t-\tau)\,\text{d}\tau\),那么响应函数\(y(t)\)就是式(5),它就是LIT系统的表征函数。虽然一般把\(h(t)\)称为单位冲激响应,但形式\(h(t-\tau)\,\text{d}\tau\)才是真正意义上的响应函数。就好比把\(\delta(t-\tau)\,\text{d}\tau\)视为真正的输入信号,而\(\delta(t-\tau),\,h(t-\tau)\)只是响应系数而已。理清这个关系,在今后的推导中才不会困惑。
\[x(t)\,\to\, y(t)=\int_{-\infty}^{\infty}x(\tau)h(t-\tau)\text{d}\tau\tag{5}\]
刚才一直是把式(5)看成函数的叠加,如果在某个固定的时间点\(t=t_0\)观察这个式子,\(h(t_0-\tau)\)显然表示时间点\(\tau\)的单位冲激在\(t_0\)时刻的响应系数,而\(y(t_0)\)就是所有时间的响应叠加。在这样的理解下,我们就比较容易讨论因果性系统的输出函数。因果系统每个时刻的信号只能对之后的输出造成影响,在函数上的表现就是:当\(\tau>t_0\)时\(h(t_0-\tau)=0\)(也可以说,当\(t_0<0\)时\(h(t_0)=0\))。使用换元法整理式(5),便得到因果LIT系统的表征函数如式(6)所示。特别地,无记忆系统的单位冲激响应可以计作\(h(t)=k\delta(t)\),系统表征函数简化为\(y(t)=kx(t)\),这就是我们直觉上认为“应该是”的那个线性系统。
\[x(t)\,\to\, y(t)=\int_0^{\infty}x(t-\tau)h(\tau)\text{d}\tau\tag{6}\]
对于一个稳定系统,要求\(x(t)\)有限时\(y(t)\)也有限,用反证法可知\(h(t)\)是绝对可积的(式(7))。反之如果式(7)成立,也不难证明\(y(t)\)有界(取\(|x(t)|\)的上限),从而我们知道:单位冲激响应绝对可积是系统稳定的充要条件。稳定系统的\(h(t)\)一般表现为渐进趋于\(0\),如果它在有限时间后只有\(0\)值,这样的响应也叫有限冲激响应(FIR),这种系统也比较常见。另外,\(h(t)\)收敛于0的速度,一定程度上体现了系统响应的快慢。
\[\int_{-\infty}^{+\infty}|h(\tau)|\,\text{d}\tau<\infty\tag{7}\]
2.3 卷积
LIT的表征函数(5)由两个函数生成另一个函数,这样函数间的“运算”在实变函数里叫算子,而式(5)这样的算子被称为卷积。卷积就好像是把其中一个函数反转,然后移动着和另一个函数积分,明白式(5)的物理意义后,也能类推这种算子的作用了。一般把函数的卷积计作\(x(t)*y(t)\),由式(5)中\(x(t),h(t)\)角色的对称性,不难得知卷积满足交换律(式(8))。
\[x(t)*y(t)=y(t)*x(t)\tag{8}\]
另外也不难证明(实变函数课程中有详细证明,也并不难),卷积还满足式(9)(10)的分配率和结合律(结合律本质上跟矩阵乘法的结合律相同)。既然LIT的表征函数是一个卷积\(x(t)*h(t)\),再根据卷积的运算律,就能得到LIT系统的一些主要性质。比如系统\(h_1(t),h_2(t)\)并联后的系统满足:单位冲激响应为\(h_1(t)+h_2(t)\);而串联(级联)后的系统满足:单位冲激响应为\(h_1(t)*h_2(t)\),且串联的子系统可以任意调换顺序。反之如果系统的单位冲激响应可拆解为多个简单的响应,则可以方便地将系统拆解为子系统。
\[x(t)*[y(t)+z(t)]=x(t)*y(t)+x(t)*z(t)\tag{9}\]
\[x(t)*[y(t)*z(t)]=[x(t)*y(t)]*z(t)\tag{10}\]
不难验证,微分、积分本身就是LIT系统,根据卷积的结合律便有式(11)(12)成立,它们是卷积和微积分运算的互换法则。为了显式表示微积分的单位冲激响应,先考察恒定变换\(x(t)\to x(t)\),根据式(4)可知它的单位冲激响应就是\(\delta(t)\)。利用结合律可知,微、积分系统的单位冲激响应就是\(\delta(t)\)的微、积分。把\(\delta(t)\)计作\(u_0(t)\),它的(高阶)微积分计作\(u_n(t)\)(式(13),\(n\leqslant 0\)时都是奇异函数)。其中\(u_{-1}(t)\)就是上面提到的Heviside阶梯函数,它也被称为阶跃响应函数,简计作\(u(t)\)。再一次使用结合律,容易有式(14)的性质。
\[\dfrac{\text{d}}{\text{d}t}[x(t)*y(t)]=x(t)*\dfrac{\text{d}y(t)}{\text{d}t}\tag{11}\]
\[\int_{-\infty}^tx(\tau)*y(\tau)\,\text{d}\tau=x(t)*\int_{-\infty}^ty(\tau)\,\text{d}\tau\tag{12}\]
\[u_{n}(t)=\dfrac{\text{d}^n\delta(t)}{\text{d}t^n};\;\;u_{-n}(t)=\int_{-\infty}^t\dots\int_{-\infty}^\tau\delta(\tau)\,\text{d}\tau\tag{13}\]
\[u_m(t)*u_n(t)=u_{m+n}(t),\;\;(m,n\in\Bbb{Z})\tag{14}\]
本系列目录
01 - 线性时不变系统
02 - 傅里叶变换
03 - 系统函数的性质
04 - 离散时间信号
05 - 滤波、采样和通信
06 - 有理系统
博客总目录在这里
【前序学科】微积分、傅里叶分析、常微分方程
【参考资料】
[1] 《信号与系统(2nd)》,奥本海姆,2013
本课程的主要参考书,内容详实,有丰富的例题、习题、以及现实中具体的问题。数学部分适合起点低的同学,但个人感觉缺少对本质的分析。过于周全的缺点便是,难以突显核心的结论,以及不能将关键信息立体地串联起来。