文章主要参考Opencv Sift和Surf特征实现图像无缝拼接生成全景图像,我做了一小点点的修改,同时在iOS上能正常使用。
问题说明
在
Xcode9中,如果直接将图片等文件拖拽进项目中,可能会识别不到。这时候,我们通过Add Files to xxx的方式来进行添加。
项目目录文件结构
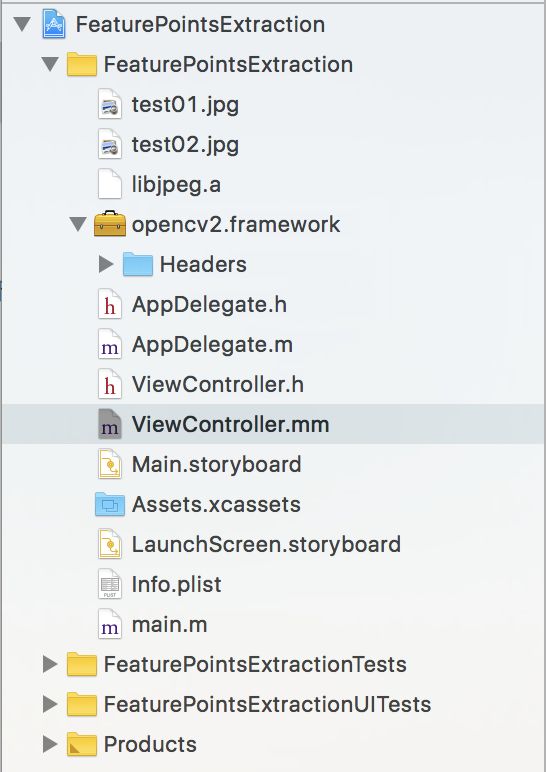
屏幕快照 2017-10-23 下午5.29.10.png
主要代码
一、合成代码
#include "opencv2.framework/Headers/opencv.hpp"
#include "opencv2.framework/Headers/legacy/legacy.hpp"
#include "opencv2.framework/Headers/nonfree/nonfree.hpp"
#include
#include
using namespace std;
using namespace cv;
//计算原始图像点位在经过矩阵变换后在目标图像上对应位置
Point2f getTransformPoint(const Point2f originalPoint,const Mat &transformMaxtri){
Mat originelP,targetP;
originelP=(Mat_(3,1)<(0,0)/targetP.at(2,0);
float y=targetP.at(1,0)/targetP.at(2,0);
return Point2f(x,y);
}
- (UIImage *)composeImage{
NSString *path01 = [[NSBundle mainBundle] pathForResource:@"test01" ofType:@"jpg"];
NSString *path02 = [[NSBundle mainBundle] pathForResource:@"test02" ofType:@"jpg"];
Mat img01;
Mat img02;
if (path01 == nil && path02 == nil) {
return [UIImage new];
}
else{
img01 = imread([path01 UTF8String]);
img02 = imread([path02 UTF8String]);
//如果没有读取到image
if (!img01.data && !img02.data) {
return [UIImage new];
}
//灰度图转换
Mat img_h_01 ,img_h_02;
cvtColor(img01, img_h_01, CV_RGB2GRAY);
cvtColor(img02, img_h_02, CV_RGB2GRAY);
//提取特征点
SiftFeatureDetector siftDetector(800);
vector keyPoint1,KeyPoint2;
siftDetector.detect(img_h_01, keyPoint1);
siftDetector.detect(img_h_02, KeyPoint2);
//特征点描述,为下面的特征点匹配做准备
SiftDescriptorExtractor siftDescriptor;
Mat img_description_01,img_description_02;
siftDescriptor.compute(img_h_01, keyPoint1, img_description_01);
siftDescriptor.compute(img_h_02, KeyPoint2, img_description_02);
//获得匹配特征点,并提取最优配对
FlannBasedMatcher matcher;
vector matchePoints;
matcher.match(img_description_01,img_description_02,matchePoints,Mat());
sort(matchePoints.begin(), matchePoints.end());//特征点排序
//获取排在前N个的最优配对
vector imagePoints1,imagePoints2;
for (int i = 0; i < 10; i++) {
imagePoints1.push_back(keyPoint1[matchePoints[i].queryIdx].pt);
imagePoints2.push_back(KeyPoint2[matchePoints[i].trainIdx].pt);
}
//获取img1到img2的投影映射矩阵,尺寸为3*3
Mat homo = findHomography(imagePoints1, imagePoints2, CV_RANSAC);
Mat adjustMat = (Mat_(3,3)<<1.0,0,img01.cols,0,1.0,0,0,0,1.0);
Mat adjustHomo = adjustMat * homo;
//获得最强配对点在原始图像和矩阵变换后图像上的对应位置,用于图像拼接点的定位
Point2f originalLinkPoint,targetLintPoint,basedImagePoint;
originalLinkPoint = keyPoint1[matchePoints[0].queryIdx].pt;
targetLintPoint = getTransformPoint(originalLinkPoint, adjustHomo);
basedImagePoint = KeyPoint2[matchePoints[0].trainIdx].pt;
//图像配准
Mat imageTransform1;
warpPerspective(img01, imageTransform1, adjustHomo, cv::Size(img02.cols+img01.cols+110,img02.rows));
//在最强配准点左侧的重叠区域进行累加,使衔接稳定过度,消除突变
Mat image01OverLap,image02OverLap;
image01OverLap = imageTransform1(cv::Rect(cv::Point(targetLintPoint.x - basedImagePoint.x,0),cv::Point(targetLintPoint.x,img02.rows)));
image02OverLap = img02(cv::Rect(0,0,image01OverLap.cols,image01OverLap.rows));
//复制img01的重叠部分
Mat image01ROICOPY = image01OverLap.clone();
for (int i = 0; i < image01OverLap.rows; i++) {
for (int j = 0; j < image01OverLap.cols;j++) {
double weight;
//随距离改变而改变的叠加体系
weight = (double)j/image01OverLap.cols;
image01OverLap.at(i,j)[0] = (1 - weight)*image01ROICOPY.at(i,j)[0]+weight*image02OverLap.at(i,j)[0];
image01OverLap.at(i,j)[1] = (1 - weight)*image01ROICOPY.at(i,j)[1]+weight*image02OverLap.at(i,j)[1];
image01OverLap.at(i,j)[2] = (1 - weight)*image01ROICOPY.at(i,j)[2]+weight*image02OverLap.at(i,j)[2];
}
}
Mat ROIMat = img02(cv::Rect(cv::Point(image01OverLap.cols,0),cv::Point(img02.cols,img02.rows)));
ROIMat.copyTo(Mat(imageTransform1,cv::Rect(targetLintPoint.x,0,ROIMat.cols,img02.rows)));
return [self imageWithCVMat:imageTransform1];
}
}
二、CVMat转UIImage
- (UIImage *)imageWithCVMat:(const cv::Mat&)cvMat
{
NSData *data = [NSData dataWithBytes:cvMat.data length:cvMat.elemSize() * cvMat.total()];
CGColorSpaceRef colorSpace;
if (cvMat.elemSize() == 1) {
colorSpace = CGColorSpaceCreateDeviceGray();
} else {
colorSpace = CGColorSpaceCreateDeviceRGB();
}
CGDataProviderRef provider = CGDataProviderCreateWithCFData((__bridge CFDataRef)data);
// Creating CGImage from cv::Mat
CGImageRef imageRef = CGImageCreate(cvMat.cols, //width
cvMat.rows, //height
8, //bits per component
8 * cvMat.elemSize(), //bits per pixel
cvMat.step[0], //bytesPerRow
colorSpace, //colorspace
kCGImageAlphaNone|kCGBitmapByteOrderDefault,// bitmap info
provider, //CGDataProviderRef
NULL, //decode
false, //should interpolate
kCGRenderingIntentDefault //intent
);
UIImage *cvImage = [[UIImage alloc]initWithCGImage:imageRef];
CGImageRelease(imageRef);
CGDataProviderRelease(provider);
CGColorSpaceRelease(colorSpace);
return cvImage;
}
三、显示合成的图片
- (void)viewDidLoad {
[super viewDidLoad];
double start = [[NSDate date] timeIntervalSince1970]*1000;
NSLog(@"start time= %f ", (start));
UIImageView *img = [[UIImageView alloc]initWithFrame:self.view.bounds];
img.contentMode = UIViewContentModeScaleAspectFit;
img.image = [self composeImage];
[self.view addSubview:img];
double end = [[NSDate date] timeIntervalSince1970]*1000;
NSLog(@"end time= %f ", (end));
NSLog(@"use time =%f millisecond ", (end-start));
}