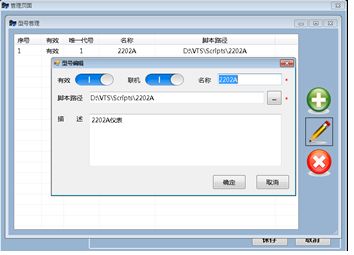
1.增加型号
在VTS管理界面下,进入到型号管理界面。
管理界面右侧有三个按钮:
从上往下分别是:添加新型号/修改型号信息/删除信号
点击添加新型号按钮
填写 型号名称/脚本路径(可以不用改变)/描述
VTS会为分配一个唯一代号
这个唯一代号随后要
填入到Execl配置文件中。
2.配置EXECL
1.修改产品型号信息
copy一个之前产品的配置文件,
在Typecode中填入之前VTS生成的唯一代号。
在TypeName中填入产品型号名称
ScriptsPath一栏可以不变动

2.LED测试配置
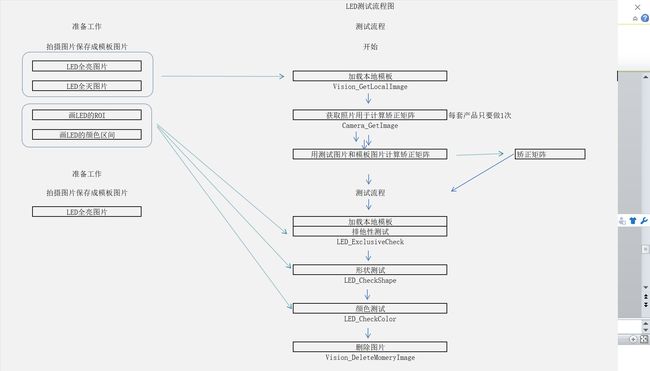
1.保存模板
手动控制产品,在LED全亮和全灭的状态下分别拍摄照片保存成模板图片。
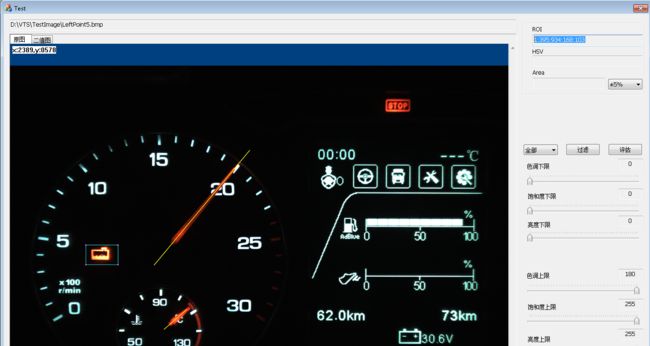
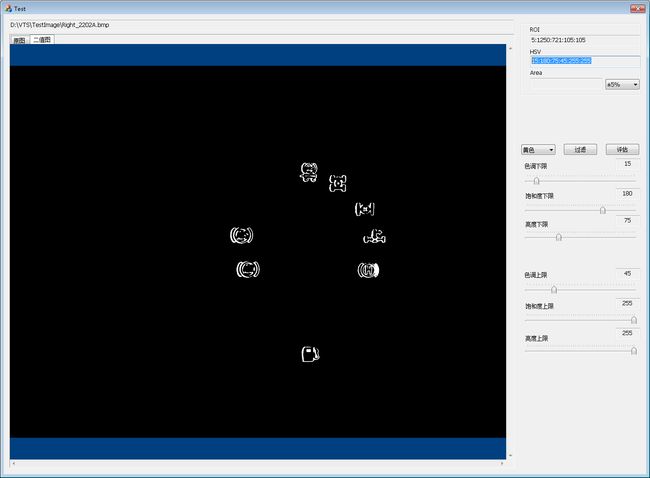
2.画LED的ROI
使用VTS自带的工具画出LED的测试区域
将图片拖进Test界面,电机鼠标右键弹出菜单,可以选择画矩形ROI或者圆形ROI。
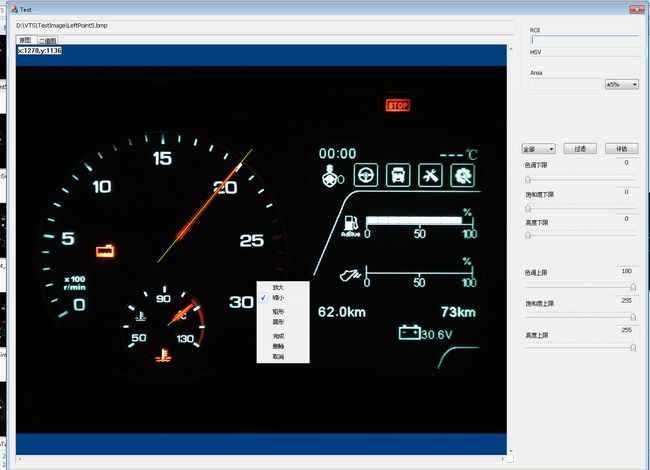
使用鼠标在图片画出ROI,ROI坐标信息出现在右侧ROI文本框内。
2.画LED的颜色区间
自VTS自带工具中下拉框选择LED的颜色,界面上会自动生成颜色的HSV区间,点击界面上的过滤按钮,可以查看颜色过滤的效果,并时情况拖动滑块修改颜色区间。在二值化界面可以看到颜色过滤的效果。
你还可以使用GIMP软件,

使用工具栏/工具/颜色拾取工具,按下Shift键,用鼠标点击要查看的区域,查看LED的HSV值,并以此参考修改颜色范围。
GIMP中HSV的区间为:H: 0— 360 S: 0— 100 V: 0— 100
VTS中HSV的区间为: H: 0— 180 S: 0— 255 V: 0— 255
GIMP的HSV值要按照以上区间变换下得到VTS中对应的HSV值

2.配置LED测试流程
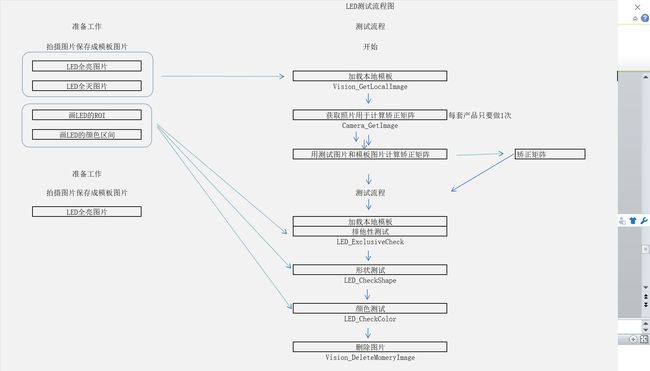
1.使用Camera_OpenCamera打开相机
参数 1:相机索引号 2:相机序列号
返回值 1:成功 0:失败
2.使用SetCameraBalanceRatio设置相机白平衡
参数 1:相机索引号 2:相机白平衡参数(3个数字,用逗号隔开)
返回值 1:成功 0:失败
3.使用SetCameraGain设置相机增益
参数 1:相机索引号 2:相机增益参数
返回值 1:成功 0:失败
4.使用PowerCtrl打开电源,使用SignalSource_WriteDO控制信号源给仪表上电
PowerCtrl
参数 1:电源输出通道 2:输出电压 3:输出电流 4:输出状态(0:OFF 1:ON)
返回值 1:成功 0:失败
SignalSource_WriteDO
参数 1:信号源ID,信号源电平输出通道,输出状态(0:断开 1:低电平:2:高电平)
返回值 1:成功 0:失败
5.使用CAN_AddPeriodMsg增加需要发送CAN信号节点
参数 1:USB CAN通道号 2:CAN节点ID 3:CAN节点初始数据 4:发送周期
返回值 1:成功 0:失败
6.使用Vision_GetLocalImage将保存在本地的模板图片加载到内存中
参数 1:模板图片文件名
返回值 1:模板图片内存地址(类型为bin)
7.使用SetCameraShutter调节相机的曝光
参数 1:相机索引号 2:曝光参数
返回值 1:成功 0:失败
8.使用Camera_GetImage抓取一张照片用于计算矫正矩阵
参数 1:相机索引号 2:矫正矩阵内存地址(可选)
返回值 1:成功 0:失败
9.使用Camera_SaveImage将抓取的照片保存至本地
参数 1:相机索引号 2:需要保存的图片内存地址 3:保存的路径,名称
返回值 1:成功 0:失败
10.使用Vision_CalcHomographyMatrix,利用模板图片和之前抓取的图片计算矫正矩阵
参数 1:相机索引号 2:模板图片 3:获取的图片
返回值 得到的矫正矩阵内存地址
11.使用CAN_SetPeriodData发送CAN信号点亮CAN信号灯,使用SignalSource_WriteDO控制信号电平输出点亮硬件信号灯
CAN_SetPeriodData
参数 1:USB CAN通道号 2:CAN节点ID 3:CAN节点数据
返回值 1:成功 0:失败
12.使用Camera_GetImage获取LED测试图片
13.使用LED_ExclusiveCheck进行LED排他检查
参数 1:相机索引号 2:测试图片 3:ROI 4:排他模板图片 5:不区域排他(可以填写多个,隔开)
返回值:排他区域内的最大亮点面积
14.使用LED_CheckShape进行LED形状检测
参数 1:相机索引号 2:测试图片 3:ROI 4:形状模板图片 5:结果图片保存位置
返回值:LED灯和模板的差异大小(像素点个数)
15.使用LED_CheckColor进行LED颜色检查检测
参数 1:相机索引号 2:测试图片 3:ROI 4:颜色区间 5:结果图片保存位置
返回值:LED颜色区间过滤后面积(像素点个数)
16.使用Vision_DeleteMomeryImage将LED测试图片从内存中删除
参数 1:相机索引号 2:待删除图片图
返回值:1:成功 0失败
2.配置指针测试流程
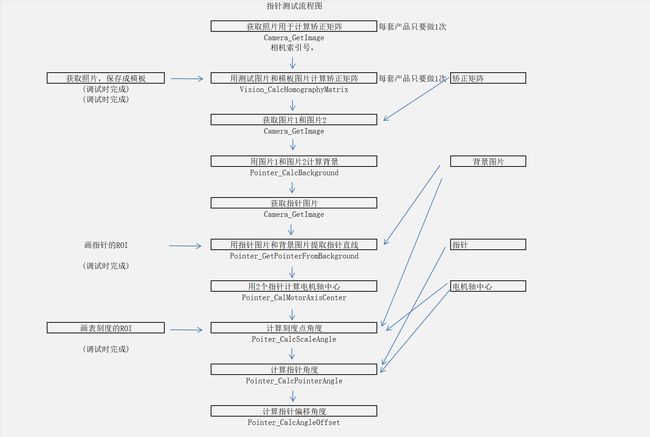
1.使用Camera_OpenCamera打开相机
2.使用SetCameraBalanceRatio设置相机白平衡
3.使用SetCameraGain设置相机增益
4.使用SignalSource_WriteDO控制信号源给仪表上电
5.使用CAN_AddPeriodMsg增加需要发送CAN信号节点
6.使用Vision_GetLocalImage将保存在本地的模板图片加载到内存中
7.使用SetCameraShutter调节相机的曝光
8.使用Camera_GetImage抓取一张照片用于计算矫正矩阵
9.使用Camera_SaveImage将抓取的照片保存至本地
10.使用Vision_CalcHomographyMatrix,利用模板图片和之前抓取的图片计算矫正矩阵
11.使用CAN_SetPeriodData发送CAN信号驱动CAN信号指针,使用SignalSource_SetResistor
控制信号源输出电阻驱动燃油指针
SignalSource_SetResistor
参数 1:信号源ID,信号源电阻输出通道,输出阻值
返回值 1:成功 0:失败
12.使用Camera_GetImage抓取背景图片1
13.使用Camera_GetImage抓取背景图片2(背景图片1和背景图片2的指针要在不同位置)
14.使用Pointer_CalcBackground将背景图片1和背景图片2合成成背景图片
参数 1:相机索引号 2:背景图片1 3:背景图片2
返回值:合成后的背景图片内存地址
15.使用Camera_GetImage抓取指针测试图片
16.使用Pointer_GetPointerFromBackground,结合指针测试图片和背景图片提取指针
参数 1:相机索引号 2:指针图片 3:背景图片 4:指针ROI 5:指针颜色区间 6:结果图片保存位置
返回值 提取的指针直线内存位置(bin)
17.使用Vision_DeleteMomeryImage将测试图片从内存中删除
18.使用Pointer_CalMotorAxisCenter计算电机中心点。函数需要传入的参数是之前取到的2个指针,返回2个指针的交点坐标
参数 1:相机索引号 2:指针1 3:指针2
返回值 指针中心坐标内存位置
19.使用Pointer_CalcPointerAngle计算指针角度。函数使用之前取到的指针和指针交点计算指针的角度
参数 1:相机索引号 2:指针 3:指针中心坐标
返回值 指针角度
20.使用Pointer_CalcScaleAngle计算刻度角度。函数使用该出的ROI获取刻度点坐标,用刻度点坐标和指针中心店坐标计算刻度角度。
参数 1:相机索引号 2:背景图片 3:指针中心坐标 4:刻度ROI
返回值 刻度角度
21.使用Pointer_CalcAngleOffset计算指针偏差角度。函数将之前得到的指针角度减去刻度点角度得到指针偏差角度。
参数 1:相机索引号 2:指针角度 3:刻度角度
返回值 指针偏差角度
3.进度条测试
使用LCD_CheckBar 测试进度条数量。
参数 1:相机索引号 2:测试图片 3:测试区域ROI 4:方块的长宽范围(最小宽度:最大宽度:最小高度:最大高度)
返回值 进度条个数
4.字符识别
使用OCR_GetText 识别文本
参数 1:相机索引号 2:测试图片 3:测试区域ROI 4:字体名称
返回值:识别的字符串
4.声音测试
使用Sound_StartRecord开始录音
参数 1:录音时长(单位:秒) 2:录音文件保存位置及名称
返回值 1:成功 0:失败
使用Sound_CheckInRange检查声音大小
参数 1:录音文件保存位置及名称
返回值 声音强度
5.按键测试
使用LCD_CheckKey 检测按键
参数 1:相机索引号 2:测试图片 3:测试区域ROI
返回值 按键图标白色像素点比例