Ros Action消息规范
client端和server端进行通讯的规范,是依靠数据特定格式进行定义的。
client端和server端间可以不去区分编程语言,按照规范即可进行通讯,与语言无关。
我们通常用.action文件来去定义一个传输规范,这个定义出来的规范就是action消息。
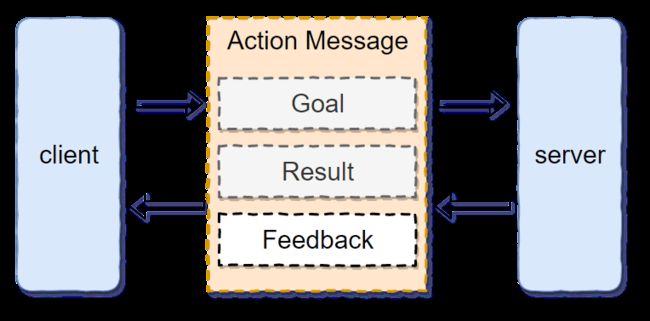
action消息包三个部分:
- Goal: client请求的消息规范
- Result:server端响应的结果规范
- Feedback:server端响应的进度反馈规范
对于每一个阶段的消息规范,都是遵循Msg消息定义的格式的。
#自定义Action消息
Action的消息规范主要是为了描述Client端和Server端交互的数据格式,具体来说,就是为了去描述Goal,Feedback,Result的数据格式。
通常我们会新建一个package来管理并且定义Action的消息格式。以当前案例为例,我们会去新建好一个叫做demo_action_msgs的package,新建过程中,我们添加必要的依赖roscpp,rospy,rosmsg, actionlib_msgs。然后删除不必要的文件夹src,include。
需要特别注意的是,我们在此处要添加一个额外的依赖actionlib_msgs,这个依赖是为我们添加action消息必要的依赖
#1. 新建action消息描述文件
在package下创建名称为action的文件夹,接着在Action文件夹中创建CountNumber.action文件,内容如下:
int64 max
float64 duration
---
int64 count
---
float64 percent
action消息描述文件,必须放到action目录下,后缀必须是.action,这个是编码规范。
action文件中,被---分隔为三个部分。
第一个部分:描述的是Goal
第二个部分:描述的是Result
第三个部分:描述的是Feedback
#2. 配置package.xml文件
在package.xml文件中添加运行时消息生成
message_generation
message_runtime
#3.配置CMakeLists.txt文件
配置find_package,添加message_generation,效果如下:
find_package(catkin REQUIRED COMPONENTS
actionlib_msgs
roscpp
rosmsg
rospy
message_generation
)
配置generation_message,添加actionlib_msgs,效果如下:
generate_messages(
DEPENDENCIES
actionlib_msgs
std_msgs
)
配置catkin_package,添加依赖,结果如下:
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo_actions
CATKIN_DEPENDS actionlib_msgs roscpp rosmsg rospy
# DEPENDS system_lib
)
配置add_action_files,添加action文件,效果如下:
add_action_files(
FILES
CountNumber.action
)
#4. 编译action消息
来到workspace下面,进行代码编译
catkin_make
编译完成后,会在devel/include/demo_action_msgs目录下产出多个头文件。格式如下:
action文件名Action.h,action文件名Goal.h,action文件名Result.h,action文件名Feedback.h,action文件名ActionGoal.h,action文件名ActionResult.h,action文件名ActionFeedback.h