数据结构与算法(二)——向量
iwehdio的博客园:https://www.cnblogs.com/iwehdio/
1、接口与实现
向量(Vector)是最基本的线性结构,与列表一同成为线性序列。
抽象数据类型(abstract data type) = 数据模型 + 定义在该模型上的一组操作。
数据结构(data structure) = 基于某种特定语言,实现抽象数据类型的一整套算法。
抽象数据类型只关心使用的功能不关心实现即使用者,数据结构关系算法实现即开发者。
向量是数组的抽象与泛化,由一组元素按线性次序封装而成。
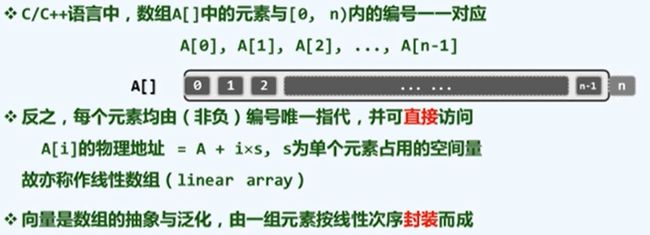
各元素与
[0,n)内的秩一一对应。元素类型不限于基本类型。
向量 ADT 接口:
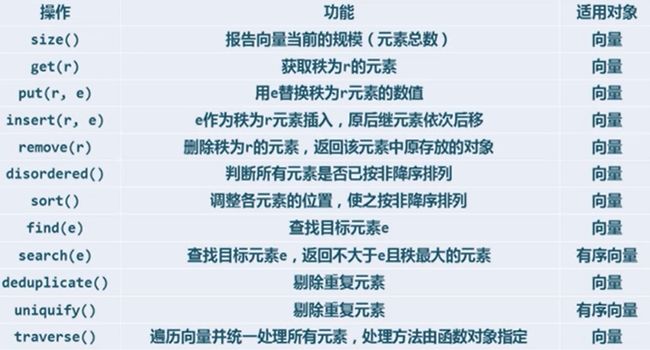
Vector模板类
构造:
Vector (int c = DEFAULT_CAPACITY){ _elem = new T[_capacity = c]; //默认 _size = 0; }其他重载方法:
析构:
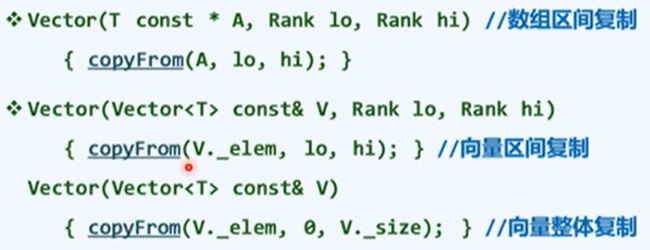
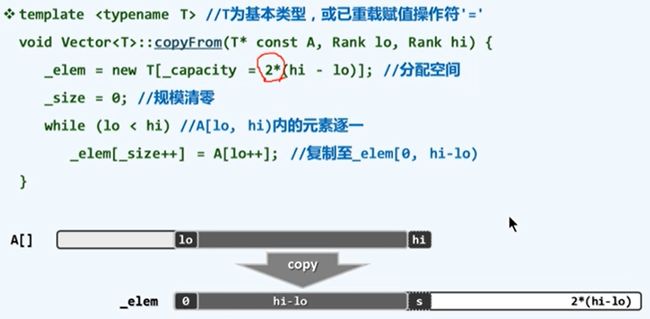
~Vector(){ delete [] _elem; //释放内部空间 }基于复制的构造(copyFrom):
2、可扩容向量
根据实际需求动态调整容量的原因:
- 最初的向量采用静态空间管理,并不具有可扩容性。而且可能出现上溢或下溢(装填因子 = 规模 / 容量 << 50%)。
- 一般的应用环境难以准确预测空间的需求量。
动态空间管理:
即将上溢时,适当扩大内部数组的容量。
即将上溢 > 申请新的更大的内存空间 > 将原来的向量内容复制入新的内存空间 > 释放原有的向量的内存空间。
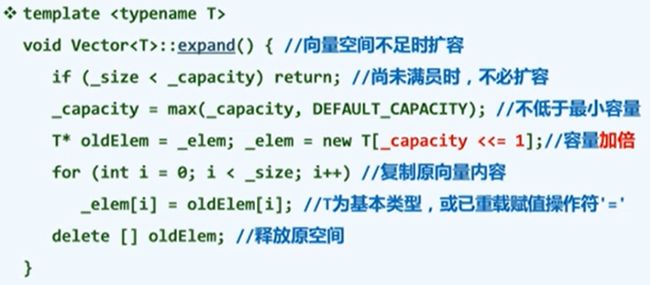
加倍扩容算法实现:
容量递增策略:每次扩容增加固定大小的容量。
- 最坏情况:在初始容量为0的空向量中,连续插入
n = m*I >> 2个元素。 - 总体耗时
O(n^2),每次扩容的分摊成本为O(n)。效率较低。
- 最坏情况:在初始容量为0的空向量中,连续插入
容量加倍策略:每次扩容容量翻倍。
- 最坏情况:在初始容量为1的满向量中,连续插入
n = 2^m >> 2个元素。 - 总体耗时
O(n),每次扩容的分摊成本为O(1)。损失了一部分空间效率。
- 最坏情况:在初始容量为1的满向量中,连续插入
分摊复杂度:(如果对单次扩容进行分析,上述两种最坏情况都是
O(n))。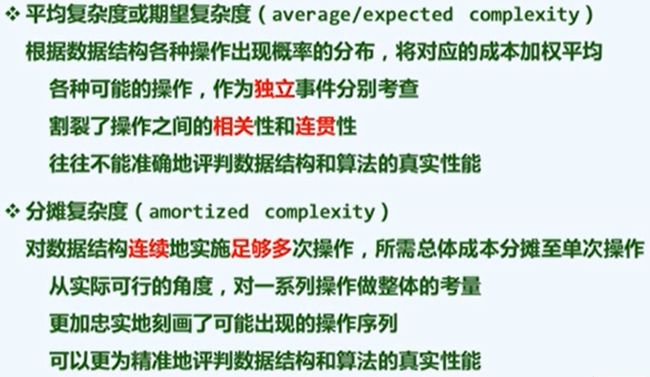
3、有序向量和无序向量
无序向量:没有排序,或无法排序的向量。
无序向量的操作:
元素访问,下标运算符 [ ] 重载。
template// 0 <= r < _size T &Vector ::operator[](Rank r) const { return _elem[r]; } // 返回值为引用,因此 V[r]可同时用于右值的访问和左值的修改。 插入操作:先判断是否需要扩容。然后从后往前,后继元素顺次后移一个单元。最后插入新元素,返回容量和秩。
template// 0 <= r < _size Rank Vector ::insert(Rank r, T const &e){ expand(); for(int i=_size; i>r; i++){ _elem[i] = _elem[i-1]; } _elem[r] = e; _size ++; return r; } 区间删除:如果要删除区间 [lo, hi) 中的元素,将 [hi, _size) 中的元素顺次前移 hi - lo 位。最后更新规模,必要时缩容。
template// 0 <= lo < hi < _size int Vector ::remove(Rank lo, Rank hi){ if(lo == hi) return 0; while(hi <_size){ _elem[lo++] = _elem[hi++]; } _size = lo; return hi -lo; } 查找:对于无序相邻,泛型 T 必须为可判等的基本类型,或已重载操作符 == 或 != 。查找 区间 [lo, hi) 中的元素。
template// 0 <= lo < hi < _size Rank Vector ::find(T const &e, Rank lo, Rank hi) const { //有多个值匹配时返回秩最大的 while((lo < hi--) && e!=_elem[hi]); //逆向查找 return hi; //如果找到,返回匹配的秩 } 输入敏感:复杂度最好 O(1),最差 O(n)。
单元素删除:就是删除区间 [ r, r+1 ) ,即区间删除的特例。
template// 0 <= r < _size T Vector ::remove(Rank r){ T e = _elem[r]; //备份 remove(r, r+1); return e; //返回被删除的元素 } 无序向量的唯一化:去重操作。
- 繁琐版:从头部开始遍历,查找第 i 个元素在其前缀中是否有重复的。如果有重复的则删除这个元素,如果没有则 i++ 。当前元素的后缀长度单调下降并且最终到0。由于 find() 和 remove() 操作每次累加的复杂度为线性,最坏的情况为 O(n^2) 。
遍历操作:对向量中的每个元素分别实施 visit 操作。
局部性修改,函数指针:
templatevoid Vector ::traverse(void (*visit)(T&)){ for(int i=0; i<_size; i++) visit(_elem[i]); } 全局性修改,函数对象:
templatetemplate void Vector ::traverse(VST& visit){ for(int i=0; i<_size; i++) visit(_elem[i]); } 将向量中的所有元素加一,例:
templatestruct Increase{ // 函数对象:重载运算符 () virtual void operator()(T &e){ e++; } } template void increase(Vector &V){ V.taverse(Increae ()); }
有序向量:相比无序相邻,还需要有比较操作,比较是否有大有小。而且其中的元素顺序要按序排列。
向量逆序程度的度量:向量逆序对的数目。
有序向量的去重操作:
在有序向量中,重复的元素必然相互紧邻构成一个区间。
低效算法:从头部开始,从前往后,逐一比对各对相邻的元素。如果雷同则删除后者,否则转至后一个元素。复杂度为 O(n^2) 。
高效算法:
低效的根源:同一个元素可作为被删除元素的后继多次前移。则可考虑成批的删除和移动。
从头部开始向后扫描,发现雷同者时,一直跳过,直到发现不同元素。然后将不同的元素前移至紧邻于前者右侧。
templateint Vector ::uniquify(){ Rank i=0, j=0; while(++j < _size){ // 边界 // 没有显式的删除操作,而是直接把不同的元素进行移动。如果调用 remove 方法,仍然不能达到高效率 if(_elem[i] != _elem[j]) { _elem[++i] = _elem[j]; } } _size = ++i; // 按向量规模删除元素 return j - i; //返回被删除的元素数量 } 通过 j 可知共进行 n - 1 次迭代,每次常数时间,时间复杂度为 O(n)。改进策略是一步到位,从全局考虑。
4、有序向量的查找算法
有序向量的查找功能:
统一接口:
templateRank Vector ::search(T const &e, Rank lo, Rank hi) const { return // 具体的二分查找或Fibonacci插值的结果 } 语义约定:
- 便于有序向量自身的维护(有序插入):
V.insert(1 + V.search(e), e)。即使失败或有重复,也给出插入位置。 - 约定返回值为不大于 e 的最有一个元素的秩。
- 若 e 小于最小的 lo 上的元素,则返回 lo - 1 (左侧哨兵)。若 e 大于最大的 hi 上的元素,则返回 hi - 1 (右侧哨兵左邻)。
- 如果有多个重复元素,则插入到重复元素结束后的下一个位置。
- 便于有序向量自身的维护(有序插入):
有序向量的二分查找功能:版本A——原理:
减而治之:以某一元素
x=S[mi]为界,都可将查找区间分为,该元素的左侧、本身和右侧三部分。将目标元素 e 与 x 做比较,即可进行进一步处理:
- 若 e < x,则 e 若存在在 x 左侧 S[ lo, mi );
- 若 e > x,则 e 若存在在 x 右侧 S( mi, hi );
- 若 e = x,则命中返回。前两种情况递归深入。
二分策略:mi 总是取为中点,每经过至多两次比较,或者命中,或者将问题规模缩减一半。
实现:
// 版本A templatestatic Rank binsearch(T *A, Tconst &e, Rank lo, Rank hi){ while(lo < hi){ Rank mi = (lo + hi) >> 1; //向下取整 if(e < A[mi]) hi = mi; //多用 < 表示从左到右的顺序意义 else if(A[mi] < e) lo = mi + 1; //lo移动到mi的右侧 else return mi; } return -1; } 时间复杂度:
O(log n):- 线性递归:
T(n)=T(n/2)+O(1)=O(log n)。 - 递归跟踪:轴点取中的,递归深度
O(log n),各个实例均耗时O(1)。
- 线性递归:
查找长度:考查关键码的比较次数( if语句)。
- 对于版本A,查找成功或失败的平均查找长度大致为
O(1.5log n)。
- 对于版本A,查找成功或失败的平均查找长度大致为
改进思路:
- 转向左、右分支前的关键码比较次数不等,但递归深度却相同。可据此进行优化。
- 通过递归深度的不均衡,对转向成本的不均衡进行补偿。
有序向量的 Fibonacci 查找功能:
原理:如果向量长度为斐波那契数减一,即 n = fib(k) - 1,则可取 mi = fib(k - 1) - 1。这样前、后子向量的长度分别为 fib(k - 1) - 1、fib(k - 2) - 1。
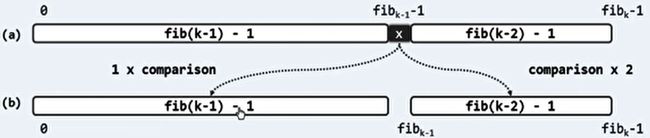
这样 Fibonacci 查找的查找长度,在常系数意义上优于二分查找。
实现:
// Fibonacci 查找 templatestatic Rank fibsearch(T *A, Tconst &e, Rank lo, Rank hi){ Fib fib(hi - lo); //创建Fib数列 while(hi - lo < fib.get()){ fib.prev(); //获取当前项的前一项 Rank mi = lo + fib.get() - 1; //黄金比例切分 if(e < A[mi]) hi = mi; else if(A[mi] < e) lo = mi + 1; else return mi; } return -1; } fib 查找的最优性:
通用策略,选取的轴点 A[ λn ] 不同,二分查找对应 λ=0.5,fib查找对应 λ=0.6180339...。
平均查找长度实际上是 λ 的函数 α ( λ ) 。
可以构造函数 α ( λ )的递推式,用 λ 表示进入左侧区间的概率:
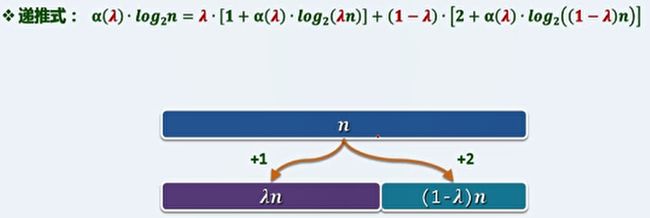
可以由求极值的方法证明,λ 为黄金分割数时, α ( λ )即平均查找长度最小。
有序向量的二分查找功能:版本B——改进:
改进思路:如果每个分支只有两个方向,则每次只做一次关键码比较即可。
将轴点归入右侧区间:
- e < x 时进入左侧;
- e >= x 时进入右侧;
- 当 hi - lo = 1时,才判断与目标元素是否相等。
实现:
// 版本B templatestatic Rank binsearch(T *A, Tconst &e, Rank lo, Rank hi){ while(1 < hi - lo){ //有效长度为1时退出 Rank mi = (lo + hi) >> 1; (e < A[mi])? hi = mi : lo = mi; } return (e == A[lo])? lo : -1; } 相比版本A,最好的情况下更坏,最坏的情况下更好,相对比较稳定。
有序向量的二分查找功能:版本C——语义约定实现:
实现:
// 版本C templatestatic Rank binsearch(T *A, Tconst &e, Rank lo, Rank hi){ while(lo < hi){ Rank mi = (lo + hi) >> 1; (e < A[mi])? hi = mi : lo = mi + 1; //左侧区间[lo, mi),区间右侧(mi, hi) } return --lo; } 与版本B的差异:
- 查找区间缩短至 1 而并非 0 时,算法才结束。
- 转入右侧区间时,左边界取 mi + 1 而非 mi 。
- 实现了约定的返回的秩的语义约定。
正确性:
- 不变性:总有 A[ 0, lo ) <= e < A[ hi, n ) ,也就是说左边界 lo 的左侧总有 <= e,包括右边界的右侧总有 > e。在查找区间 [ lo, hi ) 之外,lo - 1总是小于 e 的最大者,hi 总是大于 e 的最小者。
- 单调性:问题的规模递归的成半减小,最后缩减到 1。
- 最终,lo = hi 将整个区间分为左右两侧,[ 0, lo ) 中的元素总有 <= e,[ lo, n )中的元素总有 > e,则取返回值为[ 0, lo ) 中的最后一个元素 lo - 1。
5、排序算法
排序器统一接口:
templatevoid Vector ::sort(Rank lo, Rank hi){ switch(rand()%5){ // 冒泡排序(第二章) case 1:bubbleSort(lo, hi);break; // 选择排序(第二章习题) case 2:selectSort(lo, hi);break; // 归并排序(第二章) case 3:mergeSort(lo, hi);break; // 堆排序(第十章) case 4:heapSort(lo, hi);break; // 快速排序(第十二章) case 5:quickSort(lo, hi);break; } } 冒泡排序的原始思路:
- 每两个相邻的元素比较大小,并按比较结果决定是否交换位置。对向量进行扫描,这样每次比如会将最大的元素交换至向量末尾。
改进思路1:
- 长度等于扫描次数的向量的末尾部分一定是有序的,但是向量的前缀部分未必是无序的。
- 可以通过记录向量的前缀部分是否有序(即上一次扫描时是否经过了交换)来改进。
- 设置一个标志位,记录在上次扫描中是否发生了交换,没有发生交换时表示排序已完成,退出递归。
- 时间复杂度与改进前相比,是梯形与三角形的关系。
改进思路1的缺陷:
- 举一个例子,如果一个向量的前缀部分是完全乱序的,而末尾部分是完全顺序的,则浪费了一些操作。
- 如果取前缀长度是总长度的平方根即 r = √n,则对于改进后的算法需要 O(n*r) = O(n^1.5) 的时间,而对完全乱序的长度为 r 的向量排序所需的最小时间为 O(√n^2) = O(n) 。说明还有改进空间。
改进思路2:
多消耗的时间,是对末尾部分中已经排好序的部分进行了多次无用的扫描。
设置一个标志位 f ,记录在上次扫描中最后一次发生交换的位置,初值为 lo ,记录了最右一对逆序对的位置。然后将 hi 置为 f ,因为 f 的右侧已经是有序的。
实现:
templatevoid Vector ::bubbleSort(Rank lo, Rank hi){ // 直到返回的逆序对为初值 lo 时跳出 while(lo < (hi = bubble(lo, hi))); } template Rank Vector ::bubble()(Rank lo, Rank hi){ Rank last = lo; //记录最右侧的逆序对位置 while(++lo < hi){ //从左往右扫描 if(_elem[lo-1] > _elem[lo]){ last = lo; swap(_elem[lo-1],_elem[lo]); } } return last; } 时间复杂度是多个小梯形的面积和,但总面积一定小于等于改进1中的梯形面积。
综合评价:
- 各个改进算法的效率,对于最好情况下为 O(n) ,最坏情况下为 O(n^2) ,与改进前相同。
- 算法稳定性:输入重复元素时,输出序列的相对次序能否保持不变。
- 冒泡排序是稳定的,因为只有逆序时即严格大于时才会交换位置。
- 排序算法的效率上界为 O(n^2) ,下界为 O(nlog n) 。
归并排序原理:
运用了分治策略。先将向量一分为二(O(1)),将子序列递归的排序(2*T(n/2)),最后合并子序列(O(n))。
线性递归:
T(n)=2*T(n/2)+O(n)。则时间复杂度为O(nlog n)。例:
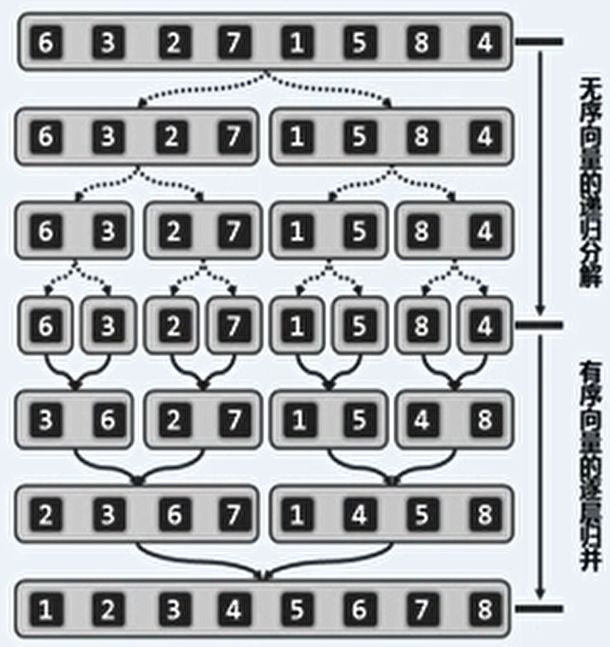
二路归并思路:
只关注向量中最小的第一个元素,取出其中更小的一个(如果相等则任取一个),然后取出元素的后继顶替成为第一个元素。
二路归并的基本实现:
templatevoid Vector ::merge(Rank lo, Rank mi, Rank hi){ T* A = _elem + lo; //合并后的向量A[0, hi-lo) = _elem[lo, hi) int lb = mi - lo; //前子向量B的长度 T* B = new T[lb]; //创建新的内存空间存储B for(Rank i = 0; i < lb; B[i] = A[i++]); int lc = hi - mi; //后子向量C的长度 T* C = _elem + mi; //不创建新的内存空间,C存储在原本A的后半部分 /* i 是所要存入A的索引,j是前子向量B的索引,k是后子向量C的索引。 当索引j和k均到达末尾时才退出*/ for(Rank i=0, j=0, k=0; (j 该循环实现紧凑,但效率不如拆分处理。
算法的正确性,运行中不会出现C中的有用信息被覆盖。
归并算法实现:
templatevoid Vector ::mergeSort(Rank lo, Rank hi){ if(hi - lo < 2) return; //区间只有一个元素,自然有序,递归基 int mi = (lo + hi) >> 1; //中点为界 mergeSort(lo, mi); //对前半段和后半段排序 mergeSort(mi, hi); merge(lo, mi, hi); //归并 性能分析:
- 初始 j = k = 0。最终 j = lb, k = lc 。
- 每经过一次迭代,j 和 k 中至少有一个会加一,(j + k至少加一)。
- 推知函数 merge() 中总体迭代不过 O(n) 次,消耗线性时间。
- 与之前对应,有线性递归方程
T(n)=2*T(n/2)+O(n)。则时间复杂度为O(nlog n)。
参考:数据结构与算法(清华大学C++描述):https://www.bilibili.com/video/av49361421
iwehdio的博客园:https://www.cnblogs.com/iwehdio/