发现一篇挺好的哈蛤
https://blog.csdn.net/qq_38410730/article/details/80066542
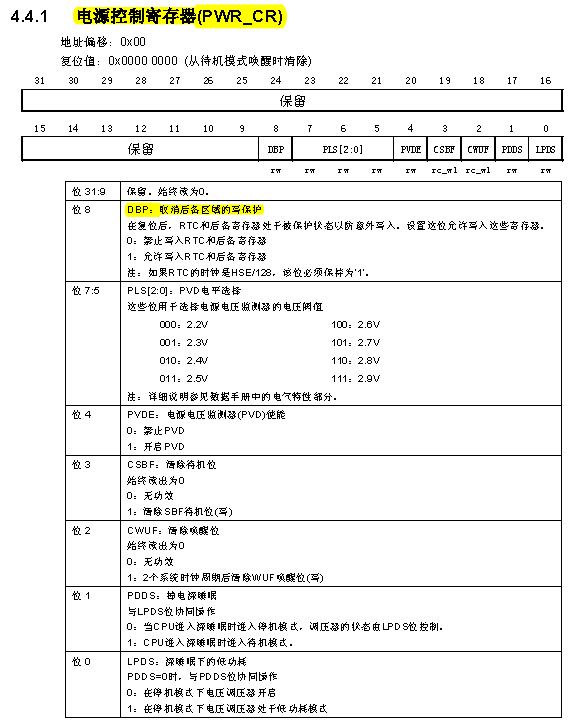
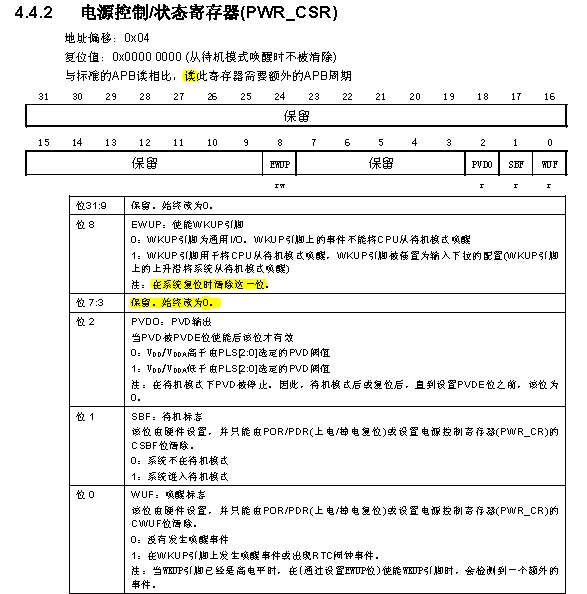
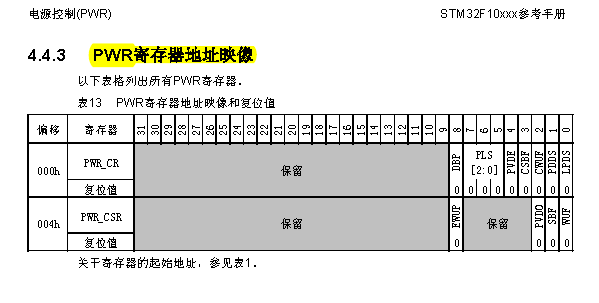
寄存器
库函数:
1、初始化:

2、使能和失能



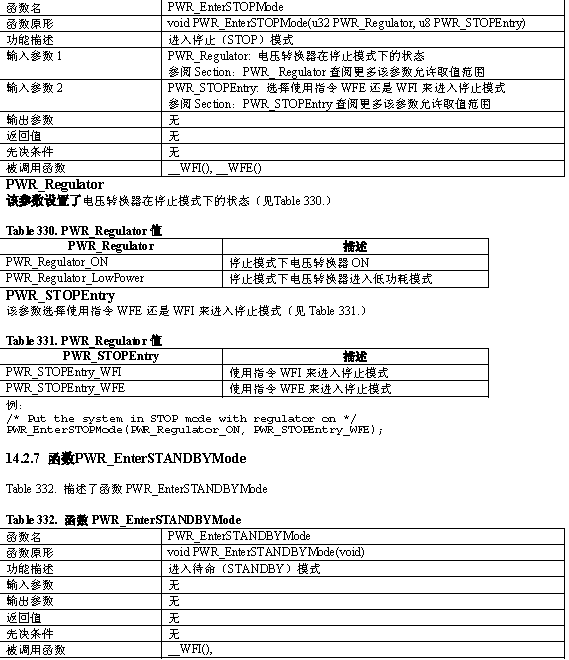
3、进入函数
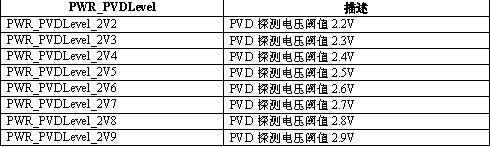
4、配置函数

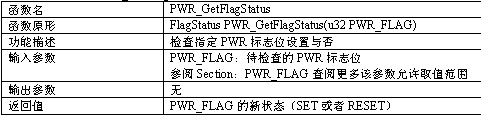
5、标志函数


示例:待机模式
#define WKUP_KD PAin(0) //PA0 检测是否外部WK_UP按键按下
void Sys_Standby(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE); //使能PWR外设时钟
PWR_WakeUpPinCmd(ENABLE); //使能唤醒管脚功能
PWR_EnterSTANDBYMode(); //进入待命(STANDBY)模式
}
//系统进入待机模式
void Sys_Enter_Standby(void)
{
RCC_APB2PeriphResetCmd(0X01FC,DISABLE); //复位所有IO口
Sys_Standby();
}
//检测WKUP脚的信号
//返回值1:连续按下3s以上
// 0:错误的触发
u8 Check_WKUP(void)
{
u8 t=0; //记录按下的时间
LED0=0; //亮灯DS0
while(1)
{
if(WKUP_KD)
{
t++; //已经按下了
delay_ms(30);
if(t>=100) //按下超过3秒钟
{
LED0=0; //点亮DS0
return 1; //按下3s以上了
}
}else
{
LED0=1;
return 0; //按下不足3秒
}
}
}
//中断,检测到PA0脚的一个上升沿.
//中断线0线上的中断检测
void EXTI0_IRQHandler(void)
{
EXTI_ClearITPendingBit(EXTI_Line0); // 清除LINE10上的中断标志位
if(Check_WKUP())//关机?
{
Sys_Enter_Standby();
}
}
//PA0 WKUP唤醒初始化
void WKUP_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);//使能GPIOA和复用功能时钟
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_0; //PA.0
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IPD;//上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
//使用外部中断方式
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); //中断线0连接GPIOA.0
EXTI_InitStructure.EXTI_Line = EXTI_Line0; //设置按键所有的外部线路
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //设外外部中断模式:EXTI线路为中断请求
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //上升沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); // 初始化外部中断
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //使能按键所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //从优先级2级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
if(Check_WKUP()==0) Sys_Standby(); //不是开机,进入待机模式
}
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
WKUP_Init(); //待机唤醒初始化
LCD_Init(); //LCD初始化
POINT_COLOR=RED;
LCD_ShowString(30,50,200,16,16,"Warship STM32");
LCD_ShowString(30,70,200,16,16,"WKUP TEST");
LCD_ShowString(30,90,200,16,16,"ATOM@ALIENTEK");
LCD_ShowString(30,110,200,16,16,"2014/1/14");
while(1)
{
LED0=!LED0;
delay_ms(250);
}
}