科幻照进现实,这带入感也太强了。小编不禁想起法国小说家儒勒.凡尔纳海底两万里里的鹦鹉螺号潜艇,那时候还没有潜艇,但小说家却比科学家,发明家更早地提出了某种机械的概念。
要想制造出现实中不存在的东西,首先你的头脑里必须得有个概念。有个人玩着玩着就把电影《阿凡达》里机甲兵给做出来了,这不仅需要超厉害的科学技术,还需要丰富的想象力和灵感。说了这么多,都迫不及待地要看看这个机甲兵是什么样子了。
酷炫的Method-1
Method-1, 13 英尺(约为4米)高,是个重达 1.5 吨的双足机器人。为了给它“瘦身”和加强防御性,它由铝和碳纤维打造而成。

Method-1
无论是在体型,力度还是手臂伸及范围上,它都具有极大的优势。

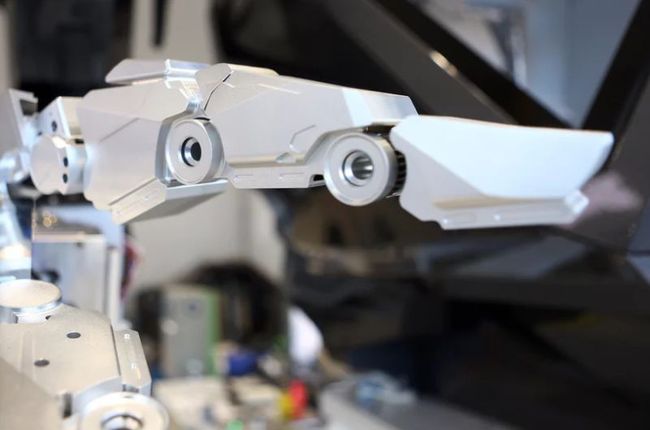
巨大的机械手
如何来调节平衡性呢?
要想像人类一样灵动自如,在这个大家伙上得费不少心思。其实在 Method-1 被真正设计出来之前,它还只是一个金属架。
金属架
首先得计算出要给机身的每个关节配备多少的马达以提供合适的扭矩力,机身安装了46个扭矩马达和多个传感器。

马达
人在座舱里通过手柄和传感器将动作反馈给机器人来保持动作的精确性。例如,当你通过手柄挥动手臂时,机器人会做出相应的动作。
机器人必须要安装一套算法软件和硬件来调节臀部和腰部动作的平衡。

硬件
如何保证动作的的灵活性
电影里的机器人灵动自如,从仿生学上来讲,这就要求机器人的每个关节具有恰到好处的摆动幅度和灵活性。例如,机械手臂就是参照人的手臂来设计的,具有三个运动轴,类似人手臂的三个关节(肩,肘,腕)。机械手臂的运动需由三个关节来协调。
三个运动轴
如何减小重力的影响
一开始为了让 Method-1 显得巨大有力量,早期 Method-1 的臀部被设计得很宽。如果你只是看着早期的 Method-1,你会产生一种错觉:平衡性和力量俱佳。

早期Method-1
当你坐在座舱的时候,你会感觉在下沉(重力带来的影响),实际上机器人在调节平衡性。但早期的 Method-1 由于臀部过宽,当机器人动起来的时候,会有比较大的晃动,座舱里的人会有一种眩晕的感觉。
在不断改进后,成型的 Method-1 在臀部的设计上比原来的版本窄得多,而设计 Method-1 的公司也没有披露其他细节。

成型的Method-1
局限性
目前,Method-1 还不够完美,因为其腿部的运动并不是由座舱里的人来操控的。腿部的运动需要靠头部上方缆绳的摆动来保持其平衡,而且地面也要平整。
头部上方的缆绳
未来的目标,三步走
下一步就是将 Method-1 应用在工业上。巨型机器人需要配备大量的电力,而目前还没有哪一家工厂有专门的电线来为其充电。要想满足特定的工业需求,机器人还需要有多种能力。例如,如果要求精确度高,机器人就得像数控机床一样可以根据需求来调节。
制造 Method-1 的公司 Hankook Mirae Technologies(韩国未来科技公司),韩国未来科技公司在日本有一家致力于福岛灾区的重建的分公司。2011 年 3 月,受地震影响,福岛核电站发生泄漏,导致大量的房屋坍塌,至今灾区还有放射性物质。Method-1 座舱的密封性极好,有利于其在辐射区开展工作。座舱的窗口由透明的材料打造,座舱里的人可以看到外部的情况。但那远远不够,外部的情况更为复杂,地面也不如室内平整,还需要在机身的外部安装摄像头来获取更清晰的图像开展工作。
由于 Method-1 的设计师与直觉外科(Intuitive Surgical)公司合作过,而直觉外科公司有一套应用在外科手术上名为达芬奇的机器人辅助外科手术系统(Da Vinci robot-assisted surgery system)。通过那套外科手术系统,外科医生可以远程进行外科手术这样如此精细的工作。另一个方向就是为 Method-1 设计一套触感反馈系统,当机械手臂抓取东西遇到阻力时,座舱里的人也可以感受到。
设计师-维塔利.巴格罗夫(Vitaly Bulgarov)
Method-1 由维塔利.巴格罗夫(Vitaly Bulgarov)设计,巴格罗夫曾经是暴雪的概念美术师。他是一个设计师和3D建模爱好者,参与过《星际争霸 Ⅱ》和电影《终结者》、《变形金刚4》里机器人的设计。

Vitaly Bulgarov
初衷和灵感
巴格罗夫制作机器人完全是处于兴趣,然而韩国未来科技公司却十分看好他的设计。万事开头难,起初巴格罗夫也不知从哪开始做。至于机器人应该是个什么样,巴格罗夫也不是很清楚,只是设计了一些图片。他从小就喜欢玩电子游戏,看科幻电影,一开始只知道要制作一个双足机器人,由人来控制。
他早期的一个设计看起来小巧灵动,但在实际制作过程中却遇到很多困难,包括机器人的运动幅度和机身每个关节的自由度。阿凡达里的机甲兵使得他推翻之前的设计并重新设计,而制作上的局限性使得Method-1成为现在的样子,显得比较笨重。

现在我们知道更多的是工业机器人,爆破机器人,扫地机器人,守护机器人等,而像 Method-1 这样的载人机器人却不多见。Method-1 绝不只是借电影《阿凡达》来制造噱头,未来它可能会应用到更多的场景上,如防火救援,废墟清理,电竞游戏等。
也有很多人担心机器人的发展,认为机器人发展到一定程度会变得不可控制,甚至对人类构成威胁。任何事物都具有两面性,就看人类出于何种目的,怎么应用。就像浓缩铀,若制造核弹用于战争,那就是灾难;若用于电力开发,那就是利于人类的。