由上图可以看出来,EV1527编码由一个同步吗,和地址码还有数据码组成。顾名思义同步码用于信号的同步,主要用于校验,数据码和地址码共同组成了键码,主要用于区分各个按钮。
然后同步码总共是4个周期的高电平和124个周期的低电平组成。4个周期的高电平也就是窄脉宽,12个周期的高电平是宽脉宽。
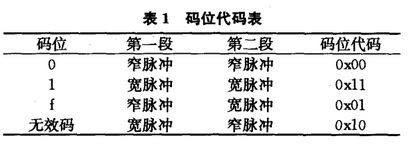
数据‘0’由两个窄脉宽组成。
数据‘1’由两个宽脉宽组成。
数据‘f’由一个窄脉宽加一个宽脉宽组成。
无效码由宽脉宽加窄脉宽组成。
所以我们的工作是要从解码开始,这里利用单片机的中断进行脉宽计数,从而利用Data_dispose()这个函数转化成以上的码位。
以下是中断部分的源代码:
INTERRUPT_HANDLER(TIM4_UPD_OVF_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
/*******************************************************************************************/
//LED灯显示
/*******************************************************************************************/
if(tim_count_on>0) //如果灯计数大于零常亮,无视闪烁间隔
{
LED_POWER_ON(); //灯点亮
tim_count_on--; //常量计数减一
tim_count_fast=0; //LED计数
tim_count_normal=0;
tim_count_low=0;
}
else //如果常亮计数不大于零,则取消常亮,恢复闪烁
{
tim_count_fast++; //LED计数
tim_count_normal++;
tim_count_low++;
}
if(tim_count_fast>=TIME_FAST_COUNT)
{
tim_count_fast=0;
if(led_speed==LED_FAST) //快速闪
LED_POWER_OX(); //呼吸灯
}
if(tim_count_normal>=TIME_NORMAL_COUNT)
{
tim_count_normal=0;
if(led_speed==LED_NORMAL) //普通
LED_POWER_OX(); //呼吸灯
}
if(tim_count_low>=TIME_SLOW_COUNT)
{
tim_count_low=0;
if(led_speed==LED_SLOW) //慢闪
LED_POWER_OX(); //呼吸灯
}
/****************************************************************/
/*******************************************************************/
//学习按键处理
if(STUDY_DATA()==0&&correct_flag==0&&flash_clear==0) //确定不处于数据清除状态和校正状态
{
time_key1_count++;
if(time_key1_count>=60000)
{
time_key1_count=0;
correct_flag=1; //进入校正状态
}
}
else if(STUDY_DATA()==1&&correct_flag==0&&flash_clear==0)
{
time_key1_count=0;
}
//清除按键处理
if(CLEAR_DATA()==0&&correct_flag==0&&flash_clear==0)
{
time_key2_count++;
if(time_key2_count>=60000)
{
time_key2_count=0;
flash_clear=1;
}
}
else if (CLEAR_DATA()==1&&correct_flag==0&&flash_clear==0)
{
time_key2_count=0;
}
/*********************************************************************/
//信号判断
/*******************************************************************/
if(EV_1527()!=0) //高电平
{ //step:一个周期分3个小段3个小段决定
high_count++;
if(step==0)
step=1;
if(step==2)
step=3;
}
else if(EV_1527()== 0 ) //低电平
{
low_count++;
if(step==1)
step=2;
}
if((tb_num==0)&&(step==3)) //同步码没接收到,判断同步码
{
step=0;
if((high_count>=L_COUNT&&high_count<=H_COUNT) && (low_count>=L_COUNT_30 &&low_count<=H_COUNT_30))
{
tb_num=1; //同步码收到,标志位=1
}
high_count=0;
low_count=0;
}
else if((tb_num==1)&&(step==3)) //同步码接受成功并且已收到一段数据
{
step=0;
if(high_count>=L_COUNT&&high_count<=H_COUNT && low_count>=L_COUNT_3&&low_count<=H_COUNT_3) //窄
{
if(high_w==0)
{
high_w=1; //窄标记
}
else if(high_w!=0)
{
high1_w=1; //窄标记
data_flag=1;
}
}
else if(low_count>=L_COUNT&&low_count<=H_COUNT && high_count>=L_COUNT_3&&high_count<=H_COUNT_3) //宽
{
if(high_w==0)
{
high_w=2; //宽标记
}
else if(high_w!=0)
{
high1_w=2; //宽标记
data_flag=1;
}
}
high_count=0;
low_count=0;
}
TIM4_ClearITPendingBit(TIM4_IT_UPDATE);
}
/**************************************************************************************************************************************************************************************************/
//信号处理,将信号转化为数据
void Data_dispose()
{
if(data_flag==1) //脉冲接收成功
{
if(high_w==1&&high1_w==1) //窄脉冲,窄脉冲
{
data[data_count]=0x00; //解码 00
data_count++;
}
else if(high_w==1&&high1_w==2) //窄宽
{
data[data_count]=0x01; //解码 01
data_count++;
}
else if(high_w==2&&high1_w==1) //宽窄
{
data[data_count]=0x02; //解码 10
data_count++;
}
else if(high_w==2&&high1_w==2) //宽宽
{
data[data_count]=0x03; //解码 11
data_count++;
}
if(data_count>=12) //数据接收完为12个字节
{
tb_num=0; //同步码清除
rev_flag=1; //接收数据成功
data_count=0; //接收计数清除
light_weight(); //数据轻量化处理
}
high_w=0; //脉冲清除
high1_w=0;
data_flag=0; //脉冲接收标志清除
}
}
/**************************************************************************************************************************************************************************************************/
//接下来还有数据校准学习函数,这个函数主要用于遥控机器码的学习,因为这个是做产品的,所以//考虑到客户会有遥控器丢失或者损坏的情况,这种情况下就需要买个新的遥控器,并且让你的机器//知道并能识别你新的遥控器的编码
u8 data_correct(void) //数据xuexi
{
led_speed=LED_FAST; //led快速闪动,证明进入学习模式
if(data_flag==1) //若收到数据
{
if(data_batch<=2) //0~2,3批次数据接收
{
if(high_w==1&&high1_w==1) //数据解码
{
data[data_batch*12+data_count]=0x00;
data_count++;
}
else if(high_w==2&&high1_w==2)
{
data[data_batch*12+data_count]=0x03;
data_count++;
}
else if(high_w==1&&high1_w==2)
{
data[data_batch*12+data_count]=0x01;
data_count++;
}
else if(high_w==2&&high1_w==1)
{
data[data_batch*12+data_count]=0x02;
data_count++;
}
if(data_count== 12) //当收满数据
{
tb_num=0; //同步码清零
rev_flag=1; //接受标志位置一
data_count=0; //接受数据位清零
data_batch++; //进入第下批数据接受
}
}
high_w=0;
high1_w=0;
data_flag=0;
if(data_batch >= 2 && data_batch<=3 ) //
{
if(strncmp(&data[(data_batch-2)*12],&data[(data_batch-1)*12],12)&&(!strncmp(&data[(data_batch-1)*12],data_0,12))); //判断第一批和第二批数据是否相同,且不
else //数据不相等,则清除,重新接受校准
{
data_batch = 0;
memset(&data[0],0,3*12);//data数据清除
}
}
if(data_batch>=3) //0,1,2。3批次连续接收相等,证明数据稳定
{
data_batch=0; //批次归零
light_weight(); //数据轻量化
if(study_step==0)
{
//按键0学习
strncpy(light_data,&tmp_data_kai_1[0],CONFIG_L); //轻量化数据存入临时数据库
memset(&light_data[0],0,CONFIG_L); //数据清除
//led_speed=LED_SLOW; //LED显示快速闪动
tim_count_on=TIME_ON_COUNT; //LED常量
delayms(200);
study_step=1; //按键1学习完毕
}
else if (study_step==1)
{
if(strncmp(light_data,&tmp_data_kai_1[0],CONFIG_L) != 1)
{
strncpy(light_data,&tmp_data_guan_1[0],CONFIG_L); //轻量化数据存入临时数据库
memset(&light_data[0],0,CONFIG_L);//data数据清除
//led_speed=LED_SLOW; //LED显示
tim_count_on=TIME_ON_COUNT;
delayms(200);
study_step=2; //按键2学习完毕
}
}
else if (study_step==2)
{
if((strncmp(light_data,&tmp_data_kai_1[0],CONFIG_L) != 1)&&(strncmp(light_data,&tmp_data_guan_1[0],CONFIG_L) != 1))
{
strncpy(light_data,&tmp_data_kai_2[0],CONFIG_L);
memset(&light_data[0],0,CONFIG_L);//data数据清除
//led_speed=LED_SLOW;
tim_count_on=TIME_ON_COUNT; //常亮一秒时间
delayms(200);
study_step=3; //按键3学习完毕,按键三学习完毕
}
}
else if (study_step==3)
{
if((strncmp(light_data,&tmp_data_kai_1[0],CONFIG_L) != 1)&&(strncmp(light_data,&tmp_data_guan_1[0],CONFIG_L) != 1)&&(strncmp(light_data,&tmp_data_kai_2[0],CONFIG_L) != 1))
{
strncpy(light_data,&tmp_data_guan_2[0],CONFIG_L); //按键4学习完毕
memset(&light_data[0],0,CONFIG_L);//data数据清除
strncpy(&tmp_data_kai_1[0],&data_fun_kai[config_data_count][0],CONFIG_L); //学习后的数据存入临时数组
strncpy(&tmp_data_guan_1[0],&data_fun_guan[config_data_count][0],CONFIG_L);
strncpy(&tmp_data_kai_2[0],&data_shk_kai[config_data_count][0],CONFIG_L);
strncpy(&tmp_data_guan_2[0],&data_shk_guan[config_data_count][0],CONFIG_L);
config_data_count++; //总共遥控器个数增加一个
memset(&tmp_data_kai_1[0],0,CONFIG_L); //临时data数据清除
memset(&tmp_data_guan_1[0],0,CONFIG_L); //临时data1数据清除
memset(&tmp_data_kai_2[0],0,CONFIG_L); //临时data数据清除
memset(&tmp_data_guan_2[0],0,CONFIG_L); //临时data1数据清除
correct_flag=0; //学习标志清零
study_step=0; //学习步骤清零
write_flag=1; //flash写入准备完成 //LED灯常量3秒,表示学习完成
tim_count_on=TIME_ON_COUNT; //亮灯计数开始
delayms(200);
led_speed=LED_SLOW;
}
}
return 1;
}
}
return 0;
}
/**************************************************************************************************************************************************************************************************/
//这一部分就是数据轻量化处理:主要用于减少数据存在flash内所占用的内存
//根据观察,上面数据总共分4类,0x00,0x01,0x02,0x03
//假设一个数据[0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03]
//轻量化之前每个0x03是0b00000011。轻量化以后0x03变成0b11,所以存储空间节省为原来的 // 1/4,最终存储可以达到10个,可以满足产品需求
void light_weight(void)
{
//数据压缩,将数据压缩成3个字节,释放存储空间
light_data[0]=data[0]+data[1]*4+ data[2]*16+ data[3]*64; //
light_data[1]=data[4]+data[5]*4+ data[6]*16+ data[7]*64; //
light_data[2]=data[8]+data[9]*4+ data[10]*16+data[11]*64; //
memset(&data[0],0,3*12);//data数据清除
}
/**************************************************************************************************************************************************************************************************/
//以下是存取flash的函数,主要用于键码的保存和读取
void write_config(void)
{
Write_EEPROM();
}
void read_config(void)
{
Read_EEPROM();
}
//------------------------------------------------------------------------------------------------------------
// 名称: Write_EEPROM 。
// 功能: 将数据写入到EEPROM中 。
// 调用:无 。
// 返回: 无 。
// 说明: 无。
// 形参: 无 。
// 形参取值范围: 无 。
//------------------------------------------------------------------------------------------------------------
void Write_EEPROM(void)
{
u8 i,j;
FLASH_Unlock(FLASH_MEMTYPE_DATA); //EEPROM解除保护。
for(i=0; i<(4*CONFIG_L*CONFIG_W)+3; i++) //写入前,全部擦除。
{
FLASH_EraseByte(EEPROM_HEAD_ADDR + i);
}
//在EEPROM的首地址写入标志字节,表示EEPROM被使用过,内有有效数据。
FLASH_ProgramByte(EEPROM_HEAD_ADDR, FLAG_VALIDDATA);
FLASH_ProgramByte(EEPROM_HEAD_ADDR+1, soft_num); //版本号
FLASH_ProgramByte(EEPROM_HEAD_ADDR+2, config_data_count);
//将10组共60个字节的数据写入EEPROM中。
for(i=0; i/**************************************************************************************************************************************************************************************************/
//以下是数据判断,根据按键来判断继电器开和关
//数据判断,判断遥控数据是开还是关
void data_judge(void)
{
u8 i;
for(i=0;i