《Android Camera架构》
《Android Camera进程间通信类总结》
《Android Camera模块解析之拍照》
《Android Camera模块解析之视频录制》
《Android Camera原理之CameraDeviceCallbacks回调模块》
《Android Camera原理之openCamera模块(一)》
《Android Camera原理之openCamera模块(二)》
《Android Camera原理之createCaptureSession模块》
《Android Camera原理之setRepeatingRequest与capture模块》
《Android Camera原理之编译》
《Android Camera原理之camera provider启动》
《Android Camera原理之cameraserver与cameraprovider是怎样联系的》
《Android Camera原理之camera service与camera provider session会话与capture request轮转》
《Android Camera原理之camera HAL底层数据结构与类总结》
《Android Camera原理之camera service类与接口关系》
在讲解《Android Camera原理之openCamera模块(二)》一文的时候提到了CameraDeviceCallbacks回调,当时没有详细展开,本文我们详细展开讲解一下。
CameraDeviceCallbacks生成过程:
《Android Camera进程间通信类总结》中2.ICameraDeviceCallbacks.aidl详细总结了CameraDeviceCallbacks的生成过程。
frameworks/av/camera/ndk/impl/ACameraDevice.h中回调接口如下。这个CameraDeviceCallbacks是openCamera的时候设置到camera service端的,后续HAL层有camera响应的话会调用ACameraDevice.h中的ServiceCallback接口来实现回调。我们需要从流程上搞清楚这些回调是在什么场景下触发的,明白了这些,才真正明白camera capture的流程。
// Callbacks from camera service
class ServiceCallback : public hardware::camera2::BnCameraDeviceCallbacks {
public:
explicit ServiceCallback(CameraDevice* device) : mDevice(device) {}
binder::Status onDeviceError(int32_t errorCode,
const CaptureResultExtras& resultExtras) override;
binder::Status onDeviceIdle() override;
binder::Status onCaptureStarted(const CaptureResultExtras& resultExtras,
int64_t timestamp) override;
binder::Status onResultReceived(const CameraMetadata& metadata,
const CaptureResultExtras& resultExtras,
const std::vector& physicalResultInfos) override;
binder::Status onPrepared(int streamId) override;
binder::Status onRequestQueueEmpty() override;
binder::Status onRepeatingRequestError(int64_t lastFrameNumber,
int32_t stoppedSequenceId) override;
private:
const wp mDevice;
};
1.onDeviceError
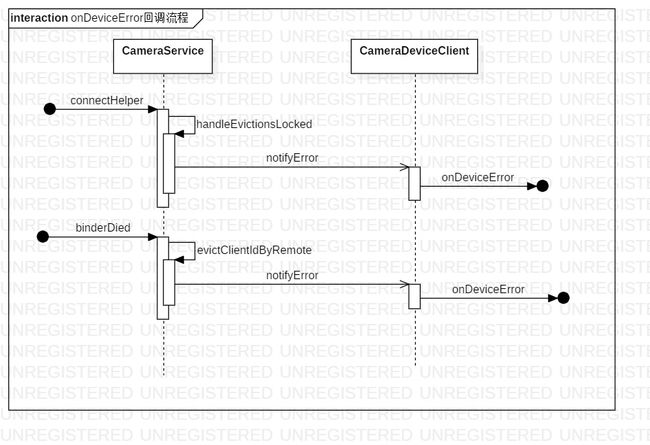
- connectHelper
在openCamera执行的时候会检查当前camera device是否正常。- binderDied
在camera service 死亡 的时候,死亡回调中会通知上层当前的camera device可能有问题。
还有一个调用的地方是Camera3Device::notifyError--->从HAL传递上来的,关于当前device是否正常的信息,如果device存在问题执行回调--->listener->notifyError(errorCode, resultExtras);
void Camera3Device::notifyError(const camera3_error_msg_t &msg,
sp listener) {
ATRACE_CALL();
// Map camera HAL error codes to ICameraDeviceCallback error codes
// Index into this with the HAL error code
static const int32_t halErrorMap[CAMERA3_MSG_NUM_ERRORS] = {
// 0 = Unused error code
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_INVALID_ERROR,
// 1 = CAMERA3_MSG_ERROR_DEVICE
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_DEVICE,
// 2 = CAMERA3_MSG_ERROR_REQUEST
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_REQUEST,
// 3 = CAMERA3_MSG_ERROR_RESULT
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT,
// 4 = CAMERA3_MSG_ERROR_BUFFER
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_BUFFER
};
int32_t errorCode =
((msg.error_code >= 0) &&
(msg.error_code < CAMERA3_MSG_NUM_ERRORS)) ?
halErrorMap[msg.error_code] :
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_INVALID_ERROR;
int streamId = 0;
if (msg.error_stream != NULL) {
Camera3Stream *stream =
Camera3Stream::cast(msg.error_stream);
streamId = stream->getId();
}
ALOGV("Camera %s: %s: HAL error, frame %d, stream %d: %d",
mId.string(), __FUNCTION__, msg.frame_number,
streamId, msg.error_code);
CaptureResultExtras resultExtras;
switch (errorCode) {
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_DEVICE:
// SET_ERR calls notifyError
SET_ERR("Camera HAL reported serious device error");
break;
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_REQUEST:
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT:
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_BUFFER:
{
Mutex::Autolock l(mInFlightLock);
ssize_t idx = mInFlightMap.indexOfKey(msg.frame_number);
if (idx >= 0) {
InFlightRequest &r = mInFlightMap.editValueAt(idx);
r.requestStatus = msg.error_code;
resultExtras = r.resultExtras;
if (hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT == errorCode
|| hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_REQUEST ==
errorCode) {
r.skipResultMetadata = true;
}
if (hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT ==
errorCode) {
// In case of missing result check whether the buffers
// returned. If they returned, then remove inflight
// request.
removeInFlightRequestIfReadyLocked(idx);
}
} else {
resultExtras.frameNumber = msg.frame_number;
ALOGE("Camera %s: %s: cannot find in-flight request on "
"frame %" PRId64 " error", mId.string(), __FUNCTION__,
resultExtras.frameNumber);
}
}
resultExtras.errorStreamId = streamId;
if (listener != NULL) {
listener->notifyError(errorCode, resultExtras);
} else {
ALOGE("Camera %s: %s: no listener available", mId.string(), __FUNCTION__);
}
break;
default:
// SET_ERR calls notifyError
SET_ERR("Unknown error message from HAL: %d", msg.error_code);
break;
}
}
2.onDeviceIdle
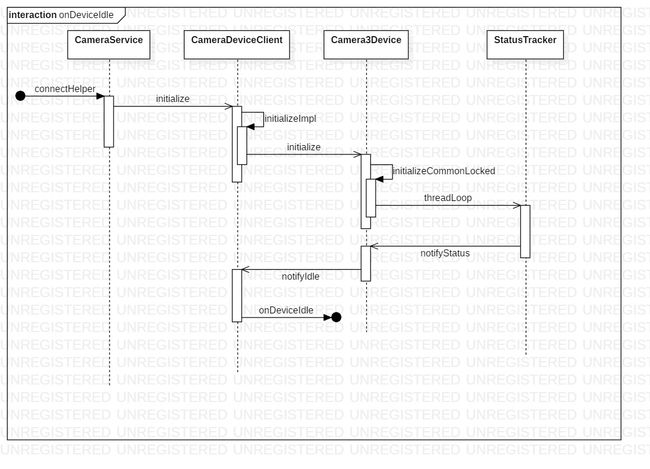
openCamera执行之后开始调用到onDeviceIdle回调。这儿的调用过程需要讲讲
Camera3Device::initializeCommonLocked
status_t Camera3Device::initializeCommonLocked() {
/** Start up status tracker thread */
mStatusTracker = new StatusTracker(this);
status_t res = mStatusTracker->run(String8::format("C3Dev-%s-Status", mId.string()).string());
if (res != OK) {
SET_ERR_L("Unable to start status tracking thread: %s (%d)",
strerror(-res), res);
mInterface->close();
mStatusTracker.clear();
return res;
}
//......
}
StatusTracker是C++中定义的线程,和java层有点类似,线程执行run会自动调用到threadLoop(),这应该很好理解。
class StatusTracker: public Thread {
public:
explicit StatusTracker(wp parent);
~StatusTracker();
virtual void requestExit();
protected:
virtual bool threadLoop();
}
接下来这个threadLoop()会一直执行,如果在执行过程中发现当前的mStateTransitions[表示设备状态]处于IDLE,这时候回调到上层。
// Notify parent for all intermediate transitions
if (mStateTransitions.size() > 0 && parent.get()) {
for (size_t i = 0; i < mStateTransitions.size(); i++) {
bool idle = (mStateTransitions[i] == IDLE);
ALOGV("Camera device is now %s", idle ? "idle" : "active");
parent->notifyStatus(idle);
}
}
3.onCaptureStarted
这个回调函数表示camera device已经准备好,可以开始调用camera获取capture frame数据了。回调的开始是camera HAL层获取底层camera device driver通知表示当前device已经准备好。通知的函数在Camera3Device::notify
Camera3Device::notify
底层msg通知当前camera 开门准备好了,可以随时准备拍照了。
void Camera3Device::notify(const camera3_notify_msg *msg) {
ATRACE_CALL();
sp listener;
{
Mutex::Autolock l(mOutputLock);
listener = mListener.promote();
}
if (msg == NULL) {
SET_ERR("HAL sent NULL notify message!");
return;
}
switch (msg->type) {
case CAMERA3_MSG_ERROR: {
notifyError(msg->message.error, listener);
break;
}
case CAMERA3_MSG_SHUTTER: {
notifyShutter(msg->message.shutter, listener);
break;
}
default:
SET_ERR("Unknown notify message from HAL: %d",
msg->type);
}
}
Camera3Device::notifyShutter
--->CameraDeviceClient::notifyShutter
此时回调到上层通知开发者当前的device shutter准备好了。
void CameraDeviceClient::notifyShutter(const CaptureResultExtras& resultExtras,
nsecs_t timestamp) {
// Thread safe. Don't bother locking.
sp remoteCb = getRemoteCallback();
if (remoteCb != 0) {
remoteCb->onCaptureStarted(resultExtras, timestamp);
}
Camera2ClientBase::notifyShutter(resultExtras, timestamp);
}
4.onResultReceived
预览的时候这个函数很重要,表示抓取的帧数据不断地返回,camera device正在不断消耗capture frame。
CameraDeviceClient::initializeImpl--->CameraDeviceClient初始化执行的时候会启动FrameProcessorBase线程。
FrameProcessorBase继承一个线程,执行run之后,它的threadLoop开始启动。
template
status_t CameraDeviceClient::initializeImpl(TProviderPtr providerPtr, const String8& monitorTags) {
//......
String8 threadName;
mFrameProcessor = new FrameProcessorBase(mDevice);
threadName = String8::format("CDU-%s-FrameProc", mCameraIdStr.string());
mFrameProcessor->run(threadName.string());
mFrameProcessor->registerListener(FRAME_PROCESSOR_LISTENER_MIN_ID,
FRAME_PROCESSOR_LISTENER_MAX_ID,
/*listener*/this,
/*sendPartials*/true);
//......
}
FrameProcessorBase::threadLoop
此时会不断到Camera HAL层取请求,是否有新的frame数据,如果有的话,处理capture frame数据。
bool FrameProcessorBase::threadLoop() {
status_t res;
sp device;
{
device = mDevice.promote();
if (device == 0) return false;
}
res = device->waitForNextFrame(kWaitDuration);
if (res == OK) {
processNewFrames(device);
} else if (res != TIMED_OUT) {
ALOGE("FrameProcessorBase: Error waiting for new "
"frames: %s (%d)", strerror(-res), res);
}
return true;
}
FrameProcessorBase::processNewFrames
--->FrameProcessorBase::processSingleFrame
--->FrameProcessorBase::processListeners
--->CameraDeviceClient::onResultAvailable
通过CameraDeviceClient::onResultAvailable函数回调到上层,然后在回调到CameraCaptureSession.CaptureCallback--->onCaptureProgressed告知开发者当前正在不断捕获capture frame数据。
/** Device-related methods */
void CameraDeviceClient::onResultAvailable(const CaptureResult& result) {
ATRACE_CALL();
ALOGV("%s", __FUNCTION__);
// Thread-safe. No lock necessary.
sp remoteCb = mRemoteCallback;
if (remoteCb != NULL) {
remoteCb->onResultReceived(result.mMetadata, result.mResultExtras,
result.mPhysicalMetadatas);
}
}
5.onPrepared
CameraCaptureSession中有两个接口:这个函数主要是用来给surface预分配内存,但是为了加速预览显示的速度。
public abstract void prepare(@NonNull Surface surface) throws CameraAccessException;
public abstract void prepare(int maxCount, @NonNull Surface surface)
throws CameraAccessException;
而CameraDeviceCallbacks->onPrepared回调就是在执行CameraCaptureSession->prepare之后回调执行的。如果向HAL申请camera device 内存分配成功,才会触发这个回调。
6.onRequestQueueEmpty
onRequestQueueEmpty回调是当前camera device的非预览流队列为空,开始准备capture 下一张图片了,只是一个中间状态。这儿不太重要,我列个调用流程就行了。
Camera3Device::RequestThread::threadLoop
bool Camera3Device::RequestThread::threadLoop() {
//......
// Wait for the next batch of requests.
waitForNextRequestBatch();
//......
}
Camera3Device::RequestThread::waitForNextRequestBatch
void Camera3Device::RequestThread::waitForNextRequestBatch() {
//......
NextRequest nextRequest;
nextRequest.captureRequest = waitForNextRequestLocked();
if (nextRequest.captureRequest == nullptr) {
return;
}
nextRequest.halRequest = camera3_capture_request_t();
nextRequest.submitted = false;
mNextRequests.add(nextRequest);
// Wait for additional requests
const size_t batchSize = nextRequest.captureRequest->mBatchSize;
for (size_t i = 1; i < batchSize; i++) {
NextRequest additionalRequest;
additionalRequest.captureRequest = waitForNextRequestLocked();
if (additionalRequest.captureRequest == nullptr) {
break;
}
additionalRequest.halRequest = camera3_capture_request_t();
additionalRequest.submitted = false;
mNextRequests.add(additionalRequest);
}
//......
}
Camera3Device::RequestThread::waitForNextRequestLocked
sp
Camera3Device::RequestThread::waitForNextRequestLocked() {
//......
if (nextRequest == NULL) {
// Don't have a repeating request already in hand, so queue
// must have an entry now.
RequestList::iterator firstRequest =
mRequestQueue.begin();
nextRequest = *firstRequest;
mRequestQueue.erase(firstRequest);
if (mRequestQueue.empty() && !nextRequest->mRepeating) {
sp listener = mListener.promote();
if (listener != NULL) {
listener->notifyRequestQueueEmpty();
}
}
}
//......
}
CameraDeviceClient::notifyRequestQueueEmpty这儿会直接回调到上层。
void CameraDeviceClient::notifyRequestQueueEmpty() {
// Thread safe. Don't bother locking.
sp remoteCb = getRemoteCallback();
if (remoteCb != 0) {
remoteCb->onRequestQueueEmpty();
}
}
7.onRepeatingRequestError
Camera3Device.h中定义了一个RequestThread线程,用来管理capture request和HAL device之间的连接。
/**
* Thread for managing capture request submission to HAL device.
*/
class RequestThread : public Thread {
//......
protected:
virtual bool threadLoop();
}
RequestThread启动的地方在Camera3Device::initializeCommonLocked中。
/** Start up request queue thread */
mRequestThread = new RequestThread(this, mStatusTracker, mInterface, sessionParamKeys);
res = mRequestThread->run(String8::format("C3Dev-%s-ReqQueue", mId.string()).string());
if (res != OK) {
SET_ERR_L("Unable to start request queue thread: %s (%d)",
strerror(-res), res);
mInterface->close();
mRequestThread.clear();
return res;
}
线程核心的执行逻辑都在threadLoop函数中--->bool Camera3Device::RequestThread::threadLoop()
bool Camera3Device::RequestThread::threadLoop() {
//......
// Prepare a batch of HAL requests and output buffers.
res = prepareHalRequests();
if (res == TIMED_OUT) {
// Not a fatal error if getting output buffers time out.
cleanUpFailedRequests(/*sendRequestError*/ true);
// Check if any stream is abandoned.
checkAndStopRepeatingRequest();
return true;
} else if (res != OK) {
cleanUpFailedRequests(/*sendRequestError*/ false);
return false;
}
//......
}
请求HAL 层的device,如果请求超时,此时的预览是无法进行下去的。执行checkAndStopRepeatingRequest();
void Camera3Device::RequestThread::checkAndStopRepeatingRequest() {
//......
if (listener != NULL && surfaceAbandoned) {
listener->notifyRepeatingRequestError(lastFrameNumber);
}
}
最终调用到CameraDeviceClient::notifyRepeatingRequestError,然后直接回调到上层,通知开发者当前的capture request请求失败了。
void CameraDeviceClient::notifyRepeatingRequestError(long lastFrameNumber) {
sp remoteCb = getRemoteCallback();
if (remoteCb != 0) {
remoteCb->onRepeatingRequestError(lastFrameNumber, mStreamingRequestId);
}
Mutex::Autolock idLock(mStreamingRequestIdLock);
mStreamingRequestId = REQUEST_ID_NONE;
}
感谢关注公众号JeffMony,持续给你带来音视频方面的知识。
