Note
这是对MIT Foundation of 3D Computer Graphics第3章的翻译,本章讲解了仿射变换的基本概念,变换矩阵的由来以及分解、通用法线变换的推导等内容。本书内容仍在不断的学习中,因此本文内容会不断的改进。若有任何建议,请不吝赐教[email protected]
注:文章中相关内容归原作者所有,翻译内容仅供学习参考。
另:Github项目CGLearning中拥有相关翻译的完整资料、内容整理、课程项目实现。
已经完成的章节
- 第一章
- 第二章
- 第三章
- 第四章
- 第五章
- 第六章
- 第七章
- 第八章
- 第九章
- 第十章
- 第十一章
- 第十二章
- 第十三章
- 第十四章
- 第十五章
- 第十六章
- 第十七章
- 第十八章
- 第十九章
- 第二十章
- 第二十一章
- 第二十二章
- 第二十三章
- 附录B-仿射函数基础
仿射(并行)(Affine)
3.1 点和帧(Points and Frames)
将点和矢量看作是两种不同的概念是有用的。点表示在几何世界中的某种固定位置,而矢量表示世界中两个点之间的运动。我们会使用两种不同的标记区分点和矢量。矢量会有一个箭头在顶部,而点会有波浪线在顶部。
如果我们认为矢量表达两点之间的运动,那么矢量操作(加法和标量乘法)就有明确的意义。如果我们把两个矢量加起来,我们在表达两个运动的串接(concatenation)。如果我们用一个标量乘以矢量,我们就在通过某个因子增加或减少运动。零矢量(zero vector)为一个特别矢量,其代表没有运动。
这些操作对于点不会真正产生任何意义。把两个点加起来应该表示什么含义,比如说,哈佛广场加上剑桥肯德尔广场(这里是两个地点名称)是什么?一个点被一个标量相乘又指得什么?什么是北极点的7倍?是否存在一个零点(zero point)和其它点的行为不一样?
存在一种在两个点之间确实有意义的操作:减法。当我们从另一个点减去一个点,我们应该会得到从第二个点到第一个点路径之间的运动,
反过来说,如果我们从一个点开始,然后移动一个矢量(位移),我们应该会到达另一个点。
对一个点应用线性变换同样有意义。例如我们可以想象一个点围绕某个固定原点的旋转。而且平移点也是有意义的(但是这个概念对于矢量没有任何意义)。要表达平移,我们需要开发仿射变换(或并行变换 affine transformation)的概念。要完成这个任务,我们借助矩阵。这些矩阵不仅对于处理本章的仿射(并行)变换很方便,而且对于描述(随后在第十章会看到的)相机投射变换也是很有帮助。
3.1.1 帧(Frames)
在仿射空间(affine space)中,我们描述任何点首先从某个原点开始,然后给其加上一个矢量的线性组合。这些矢量使用坐标和一个矢量基(basis of vectors)来表示。
此处被定义为。
而下面这行表达
被称为一个仿射帧(affine space);它就像一个基(basis),但是由3个矢量和一个点组成。
为了借助一个帧指定一个点,我们使用拥有4个条目(entries)的4部件坐标矢量(coordinate 4-vector),其中最后一个条目总为1。要借助一个帧表达一个矢量,我们使用一个让0作为第4坐标的坐标矢量(也就是说,它只是基矢量之和)。当我们建模针孔相机的行为时,要表达几何形状(还有矩阵),4部件坐标矢量的使用都会很便利。
3.2 仿射变换和矩阵(Affine transformations and Four by Four Matrices)
相似于线性变换的情形,我们想要通过在一个4部件坐标矢量和一个帧之间放置一个合适的矩阵的形式,来定义出仿射变换的概念。
让我们将仿射矩阵定义为一个如下形式的矩阵
然后我们对一个点应用仿射变换如下
或者简写为
我们可以验证上面表达的第二行描述了一个有效的点,因为乘法
给出了我们一个带有1作为第4条目的4部件坐标矢量。另一方面,我们也能够看到乘法
此处被定义为,给出了一个由3个矢量和一个原点组成的有效帧。
同时也要注意到,如果矩阵的最后一行不是这种形式,变换就通常给出一个无效的结果。
类似于线性变换的情形,我们可以针对一个帧应用仿射变换(affine transformation)为
或者简写为
3.3 对点应用线性变换(Applying Linear Transformations to Points)
假如我们有一个表达线性变换的矩阵。我们可以将其嵌入矩阵的左上方角落,并且借助这个更大的矩阵对一个点(或者帧)应用变换。
这个变换在上拥有相同效果,就如之前其所参与的线性变换。如果我们把点当作从原点偏移矢量,我们就明白这个变换和应用线性变换到偏移矢量上具有相同效果。因而,以例子来说,如果矩阵为旋转矩阵,这个变换将围绕原点旋转这个点(参考图示)。正如下面我们将在第4章中看到的,当对一个点应用一个线性变换,帧的原点位置扮演了一个重要的角色。
我们借助下列缩写用于描述一个矩阵,其只是应用了一个线性变换。
此处是一个矩阵,是一个矩阵,右上角的0代表由0组成的矩阵,右下角的1是一个标量(scalar)。
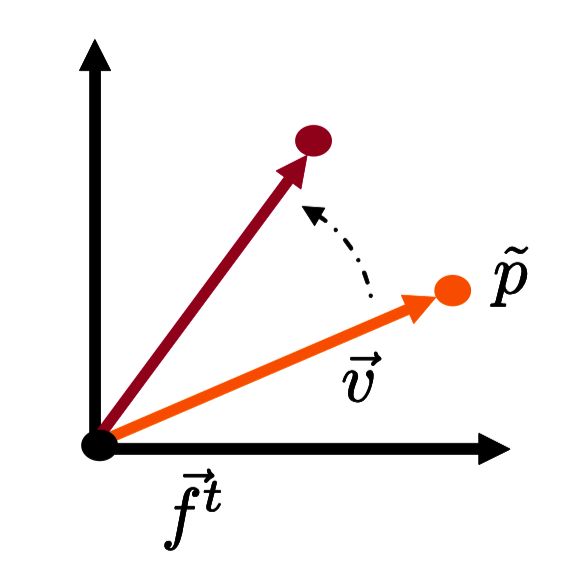
Figure 3.1: 对一个点应用线性变换。可以通过应用线性变换到始于原点的偏移矢量上来完成。
3.4 平移(Translations)
可以对点应用平移变换是很有用的。这种变换不是线性的(参考课后练习6)。仿射变换的主要新威力就是在线性变换之上表达平移的能力。实际上,如果我们应用变换
我们看到变换在坐标上的效果为
针对平移,我们使用简写
此处为 一个矩阵,为一个同一矩阵(identity matrix),右上角的为一个表达平移的矩阵,左下角的0表示一个由0组成的矩阵,右下角的1为一个变量。
注意如果在第4坐标中为0,如此就表达了一个矢量而不是一个点,从而不会被平移所影响。
3.5 汇总(Putting Them Together)
任何仿射矩阵(affine matrix)都可以被分解为线性部分和平移部分。
或者简写为
注意因为矩阵乘法不是可互换顺序的,乘法中的顺序很关键。一个仿射矩阵(affine matrix)也可以借助一个不同的平移矩阵被分解为(线性部分是不会发生变化的),但是我们不会使用这种形式。
如果,的线性部分,是一个旋转,我们把这种形式记作
在这种情形中,我们称矩阵为刚体矩阵(rigid body matrix),它所对应的变化,刚体变换(rigid body transform),简称。刚体变换保留了矢量之间的点积(dot product),基的手(螺旋)性(handedness),还有点之间的距离。
3.6 法线(Normals)
在计算机图形学中,我们经常借助表面法线确定一个表面点如何被着色。所以当表面点经历由矩阵表示的仿射变换时,我们需要懂得表面法线是如何变换的。
你可能猜测我们只要用矩阵乘以法线的坐标就可以了。例如,如果我们旋转几何形状,法线会以完全相同的方式旋转。但是事实上使用矩阵不总是正确的。例如在图示中,我们顺着轴挤压一个球体。在这种情形中,实际的法线变换会顺着轴拉伸而不是挤压。在这里我们要推导出可以应用在所有情形中的正确变换。
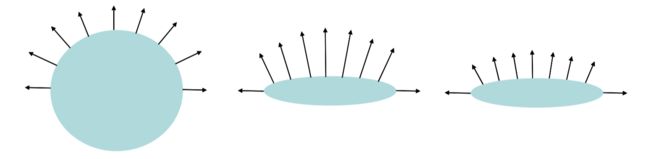
Figure 3.2: 左侧:蓝色的形状拥有以黑色表示的法线。中间:现在在轴方向上被缩小同时(未标准化的)法线在轴方向被拉伸。右侧:法线被重新标准化从而给出被挤压形状的正确的单位法线。
让我们定义位于点上平滑表面的法线为一个矢量,这个矢量正交于那个点表面的切线平面。切线平面是矢量平面,这个矢量平面通过临近的(距离无限小地)表面点之间的减法来定义,所以,针对法线和两个非常接近的点和,我们有如下表达。
在某种固定的正交标准化坐标系中,这可以被表达为
在这个公式中我们在前面的插槽中使用是因为它被0乘,从而和结果不相关。
假设存在一个由仿射矩阵表示的仿射变换,我们把这个变换应用到所有的点上。什么矢量会和任意的切线矢量保持正交状态?让我们重写方程式(3.4)为
如果我们定义为被变换点的坐标,同时让,那么我们就得到如下表达
并且我们看到是被变换的几何体法线的坐标(要依靠伸缩变换来获得标准态)。
注意因为我们不关注值,因而我们不需要关注的第四列。同时,因为A是一个仿射矩阵(affine matrix),所以也是,进而剩下三列的第四行全部是0,从而可以安全地被忽略。因而,参考简写方式
我们可以得到这种关系
此时调换整个表达式,我们就获得最终表达式
此处是矩阵的反转加调换(等价于调换加反转)。注意如果为一个旋转矩阵,且这个矩阵是正交标准化的,那么它的反转加调换事实上仍然是。在这种情形中法线的坐标表现的就像点的坐标一样。然而对于其它线性变换,法线的表现就不相同了。(参考图示。)同时也要注意到A的平移部分对法线没有影响。