概况
学好算法和数据结构对培养编程内力很重要
3Points:
- Chunk it up
- Deliberate practicing
- Feedback
知识总览
| Data Structure | Algorithm |
|---|---|
| Array | Greedy |
| Stack/Queue | Recursion/Backtrace |
| PriorityQueue(heap) | In-order/Pre-order/Post-order Traversal |
| LinkedList(single/double) | Breadth-first/Depth-first search |
| Tree/Binary Tree | Divide and Conquer |
| Disjoint Set | Dynamic Programming |
| Trie | Binary Search |
| BloomFilter | Graph |
| LRU Cache | |
| Binary Search Tree | |
| Hash Table |
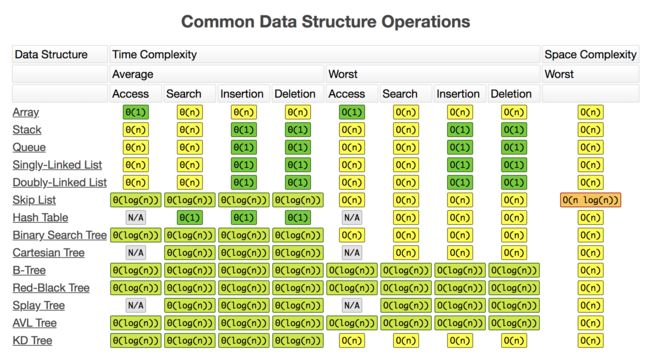
大O表示法 Big O notation
详见:http://bigocheatsheet.com/

一、数组 Array

- 数组是地址连续的
- Memory Controller 访问任何一个位置的数组下标的时间复杂度 O(1)
- 插入和删除数组的时间复杂度 O(n)
链表可以改善插入和删除数组的时间复杂度。
二、链表 Linked List
链式存储结构适用场景:
- 长度未知
- 频繁进行插入和删除操作
常见操作:
- 插入 O(1)
- 找到插入位置
- 新的节点插入到元素前
- 把前一个节点的next指针指向新节点
- 删除 O(1)
- 前面的节点next指针挪到后一个
- 把跨越过的节点从内存中删除
- 查询 O(n)
链表的查询的时间复杂度为O(n),差于数组等顺序存储结构,所以往往需要根据实际情况来博弈(动态平衡)的选择数据结构,即结合解决问题本身的特点,具体问题具体分析。
习题:数组和链表
- Leetcode206.反转链表
- Leetcode24.反转链表相邻节点
- Leetcode141.判断链表是否有环
三、排序 Sorting
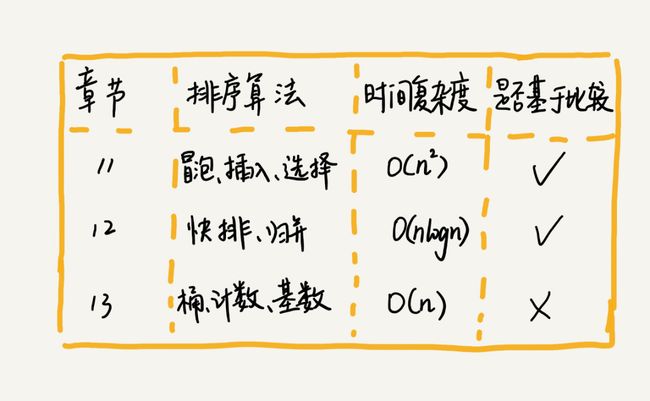
思考:在实际的开发中,我们更倾向于使用插入排序算法而不是冒泡排序算法的原因是什么(两者时间复杂度相同)?
答:性能优化更极致
如何分析一个排序算法
排序算法的执行效率
- 最好情况、最坏情况、平均情况时间复杂度
- 时间复杂度的系数、常数、低阶
- 比较次数和交换或移动次数
算法的内存消耗
算法的内存消耗可以用空间复杂度来衡量。
针对排序算法的空间复杂度,引入原地排序的概念,就是特指空间复杂度是O(1)的排序算法。
排序算法的稳定性
如果待排序的序列中存在值相等的元素,经过排序之后,相等元素之间原有的先后顺序不变,叫稳定的排序算法。
冒泡排序
只会操作相邻的两个数据,一次冒泡至少会让一个元素移动到它应该在的位置。包含两个操作子:
- 比较
- 交换
优化
当某次冒泡操作已经没有数据交换时,说明已经达到完全有序,不用再执行后续的冒泡操作。
冒泡排序的特征
- 原地排序
- 稳定性
- 时间复杂度:
最好情况:O(n)
最坏情况:O(n^2)
平均时间复杂度:O(n^2)
可以通过有序度和逆序度来分析:- 有序度是数组中具有有序关系的元素对的个数,完全有序的数组有序度叫满有序度n*(n-1)/2;(默认从小到大为有序)
- 逆序度 = 满有序度 - 有序度
插入排序
动态地往有序集合中添加数据。包含两个操作子:
- 元素的比较
- 元素的移动
插入排序的特征
- 原地排序
- 稳定性
- 时间复杂度:
最好情况:O(n)
从头到尾遍历已经有序的数据
最坏情况:O(n^2)
平均时间复杂度:O(n^2)
选择排序
类似插入排序,但选择排序会每次从未排序区间中找到最小的元素,将其放到已排序区间的末尾。
选择排序的特征
- 原地排序
- 不具有稳定性
- 时间复杂度:
最好情况、最坏情况、平均情况时间复杂度都为O(n^2)
归并排序
归并排序和快速排序算法更适合大规模的数据排序,两者都用到了分治思想。
分治思想
分治:分而治之,将一个大问题分解成小的子问题来解决。分治算法一般都是用递归实现的,分治是一种解决问题的处理思想,递归是一种编程技巧。
- 利用分治算法求一组数据的逆序对个数
归并排序的递推实现
递推公式:merge_sort(p...r) = merge(merge_sort(p...q)),merge_sort(q+1...r)
终止条件:p >= r
注:合并函数借助哨兵,代码会简洁很多。
归并排序的特征
- 不是原地排序
空间复杂度比较高,所以归并排序并没有像快排那样,应用广泛。 - 稳定性
- 递归代码的时间复杂度:
如果定义求解问题 a 的时间是 T(a),求解问题 b、c 的时间分别是 T(b) 和 T( c),得到递推关系式:T(a) = T(b) + T(c) + K(K :将两个子问题 b、c 的结果合并成问题 a 的结果所消耗的时间)。
所以,递归代码的时间复杂度也可以写成递推公式。 - 归并排序的时间复杂度:
T(1) = C;n=1 时,只需要常量级的执行时间,所以表示为 C。
T(n) = 2*T(n/2) + n;n>1
可以看出,归并排序的执行效率与要排序的原始数组的有序程度无关,所以其时间复杂度是非常稳定的,不管是最好情况、最坏情况,还是平均情况,时间复杂度都是 O(nlogn)。 - 归并排序的空间复杂度
实际上,递归代码的空间复杂度并不能像时间复杂度那样累加。尽管每次合并操作都需要申请额外的内存空间,但在合并完成之后,临时开辟的内存空间就被释放掉了。在任意时刻,CPU 只会有一个函数在执行,也就只会有一个临时的内存空间在使用。临时内存空间最大也不会超过 n 个数据的大小,所以空间复杂度是 O(n)。 - 归并排序的应用:
- LeetCode21.合并两个有序链表
快速排序 Quicksort
核心思想:
- 分治
- 分区
要使函数不占用很多额外的内存空间,就需要优化快排,即在原地完成分区操作。
优化后快速排序的特征
- 原地排序
通过设计巧妙的分区函数,可以实现原地排序,解决了归并排序占用太多内存的问题。 - 不稳定
- 快速排序的时间复杂度 O(nlogn)
快排也是用递归来实现的。如果每次分区操作,都能正好把数组分成大小接近相等的两个小区间,那快排的时间复杂度递推求解公式跟归并是相同的。所以,快排的时间复杂度也是 O(nlogn)。
但实际上很难实现,极端情况下,快排的时间复杂度就从 O(nlogn) 退化成了 O(n^2)。可以通过合理选择pivot来避免这种情况。
归并排序和快速排序的区别

归并排序的处理过程:由下到上,即先处理子问题,然后合并。
快速排序的处理过程:由上到下,即先分区,然后再处理子问题。
四、栈和队列 Stack&Queue
| Stack | Queue |
|---|---|
| FILO | FIFO |
| Array or Linked List | Array or Doubly Linked Lisk |
常用队列:消息队列

习题:栈和队列
- Leetcode20.判断括号性是否合法
- Leetcode232.225.只用堆栈实现队列/只用队列实现堆栈
- Leetcode496.下一个更大的元素
优先级队列 PriorityQueue
- 队列
- 正常进、按优先级出
实现机制:
- Heap(Binary,Binomial,Fibonacci)
- Binary Search Tree(红黑树)
堆 Heap
堆就是一种完全二叉树,最常用的存储方式就是数组。
- 大顶堆:堆中每一个节点的值大于等于子树中每个节点的值。
- 小顶堆:反之。
堆的操作 - 堆化 Heapify
- 插入:把新插入的数据放到数组的最后,然后从下往上堆化;
- 删除:把数组中的最后一个元素放到堆顶,然后从上往下堆化。
插入和删除这两个操作的时间复杂度都是O(logn)。
堆排序
- 建堆
将下标从n/2到1的节点,依次进行从上到下的堆化操作,然后就可以将数组中的数据组织成堆这种数据结构。 - 排序
迭代地将堆顶的元素放到堆的末尾,并将堆的大小减一,然后再堆化,重复这个过程,直到堆中只剩下一个元素,整个数组中的数据就都有序排列了。
严格的Fibonacci堆相对来说效率最好。
习题:堆
-
Leetcode703.判断数据流中第K大元素 - 求Top K
解法:维护一个Min Heap
-
Leetcode239.滑动窗口最大值
解法:
- 维护一个Max Heap
- (推荐)双端队列deque 时间复杂度O(n)
求中位数
优先级队列
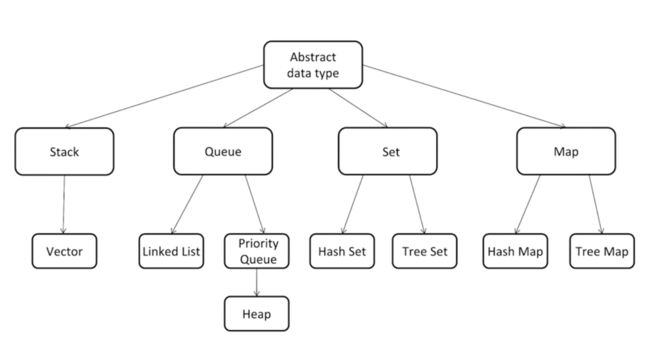
五、映射和集合 Map&Set
哈希表和哈希函数 HashTable&HashFunction
例:30个学生名字放到表里面去,便于查找某一个人,时间复杂度O(1)
不同的英文字符对应不同的下标,一般可以用ASCII码,计算函数为哈希函数
有哈希碰撞的问题
解决:建立一个链表 - 拉链法
List vs Map vs Set
List:数组和链表
Map:建立映射关系(key:value)
Set:不允许有重复的元素
Set可以理解成Map的key或者List去重。
两种映射和集合的实现对比
- HashMap vs TreeMap
- HashSet vs TreeSet
- HashTable vs binary-search-tree
时间复杂度:
Hash:O(1)
Tree:O(log(n))
总结:
- 对时间复杂度要求高使用哈希表
- 希望以相对有序的方式储存使用二叉搜索树
习题:映射和集合
-
Leetcode242.有效的字母异位词
解法:
- sort O(nlog(n))
- Map计数
-
Leetcode1.两数之和
解法:
- 暴力拆解 O(n^2)
- Set x+y=10 O(n)
-
Leetcode15.三数之和
解法:
- 暴力解法
- Set
- Sort -> Find
Leetcode18.四数之和
六、树 Tree
Height、Depth、Level概念区别

二叉树
特点:
- 每个节点最多只有两个子节点
- 根节点在Level 1
- 满二叉树:
- 叶子节点全都在最底层;
- 除了叶子节点之外,每个节点都有左右两个子节点。
- 完全二叉树:
- 叶子节点都在最底下两层
- 最后一层的叶子节点都靠左排列
- 除了最后一层,其他层每个节点都有左右两个子节点。
- 实现二叉树的方法
-
二叉链式储存法
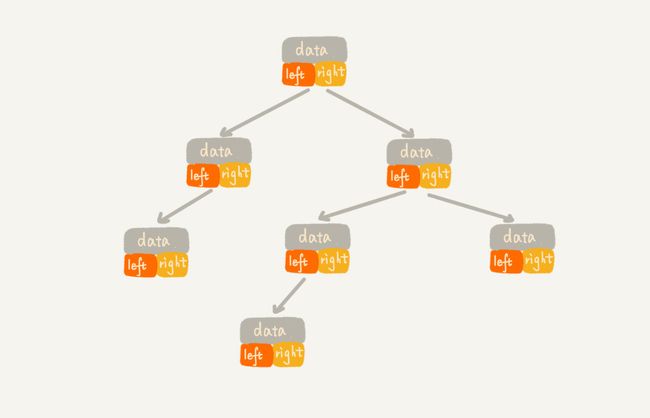 二叉链式储存法每个节点有三个字段
二叉链式储存法每个节点有三个字段 -
基于数组的顺序储存法
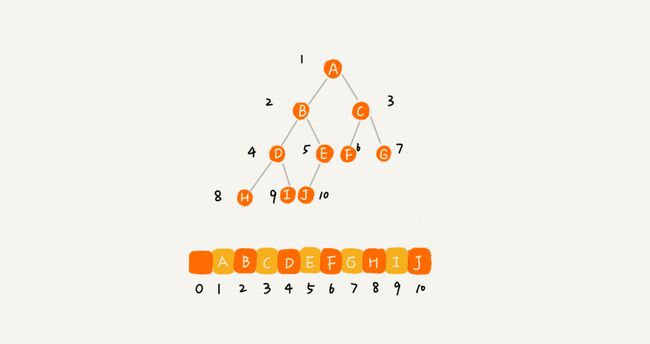 为了方便计算子节点,根节点会存储在下标为 1 的位置
为了方便计算子节点,根节点会存储在下标为 1 的位置
 非完全二叉树,会浪费比较多的数组存储空间
非完全二叉树,会浪费比较多的数组存储空间
-
注:使用顺序存储法,存储一棵完全二叉树,仅仅“浪费”了一个下标为 0 的存储位置。
二叉树的遍历
二叉树的前、中、后序遍历其实是一个递归的过程。
时间复杂度:O(n)

二叉树按层遍历,可以看作以根结点为起点,图的广度优先遍历的问题。
二叉搜索树 Binary Search Tree
也称为二叉查找树、有序二叉树、二叉排序树。支持快速查找、插入、删除数据。
二叉树要求任意一个节点:
- 左子树上所有节点的值均小于它的根节点的值
- 右子树上所有节点的值均大于它的根节点的值
- 以此类推,左右子树均满足条件
二叉搜索树可以是一棵空树。
二叉搜索树的实现
-
遍历
-
前序遍历
作用:复制已有二叉树,比重新构造二叉树实现效率要高很多,只需访问所有节点。
中序遍历:可以输出有序的数据序列,默认升序,时间复杂度O(n),非常高效。
-
后序遍历
作用:操作系统和文件系统的遍历
-
-
查找:
- 查找给定值:和根节点比较,向左子树或右子树递归
作用:判断命中
插入操作和查找操作类似。
-
删除:有三种情况
- 叶子节点:直接将父节点中,指向要删除节点的指针置为null。
- 中间节点
- 只有一个子节点:只需要更新父节点中,指向要删除节点的指针,让它指向要删除节点的子节点。
- 有两个子节点:
- 在被删除的节点右子树中找到最小子节点
- 把被删除的值替换成最小子节点
- 把最小子节点原位删除
不论是插入、删除还是查找,时间复杂度都跟树的高度成正比,也就是O(height)。理想情况下,时间复杂度是O(logn)。
如果节点的个数是 n,最大层数是L,那么 n 满足:
n >= 1+2+4+8+...+2^(L-2)+1
n <= 1+2+4+8+...+2^(L-2)+2^(L-1)
借助等比数列的求和公式,计算得出,L 的范围是 [log2(n+1) , log2n +1]。完全二叉树的层数小于等于log2n。
支持重复数据的二叉查找树
- 通过链表和支持动态扩容的数组等数据结构,把值相同的数据都储存在同一个节点上。
- 把这个新插入的重复数据当作大于这个节点的值来处理,这种方法更优雅。
散列表和二叉树相比二叉树的优势
- 散列表输出有序数据,需先排序,二叉查找树只需中序遍历
- 散列表扩容耗时很多,遇到散列冲突时,性能不稳定,平衡二叉查找树的性能非常稳定,时间复杂度稳定在 O(logn)。
- 散列表哈希冲突和哈希函数的额外耗时,有时很大。
- 平衡二叉查找树只需要考虑平衡性这一个问题,而且这个问题的解决方案比较成熟、固定。
- 散列表装载因子不能太大,特别是基于开放寻址法解决冲突的散列表,不然会浪费一定的存储空间。
红黑树 Red-Black Tree - 平衡二叉查找树
极端情况下,二叉树会退化成链表。“平衡”的意思可以等价为性能不退化。“近似平衡”就等价为性能不会退化的太严重。
平衡二叉查找树的严格定义:
二叉树中任意一个节点的左右子树的高度相差不能大于 1。
红黑树定义
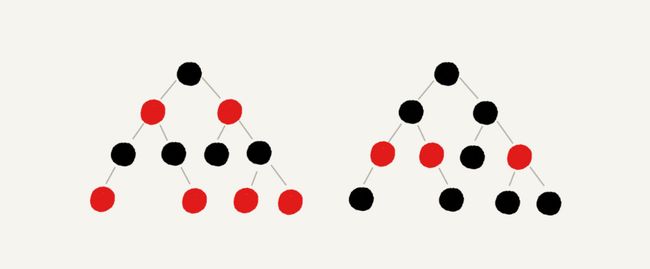
红黑树中的节点,一类被标记为黑色,一类被标记为红色。除此之外,一棵红黑树还需要满足这样几个要求:
- 根节点是黑色的
- 每个叶子节点都是黑色的空节点(NIL),也就是说,叶子节点不存储数据;
- 任何相邻的节点都不能同时为红色,也就是说,红色节点是被黑色节点隔开的;
- 每个节点,从该节点到达其可达叶子节点的所有路径,都包含相同数目的黑色节点;
红黑树没有严格符合上面的定义,它从根节点到各个叶子节点的最长路径,有可能会比最短路径大一倍,但仍是合格的平衡二叉查找树。
红黑树近似平衡,插入、删除、查找操作的时间复杂度都是O(logn)。
递归树
递归代码的时间复杂度分析:
- 递归树:快排的平均时间复杂度
- 递推公式:归并排序、快排的最好情况时间复杂度
二叉树的递归前中后序遍历,两者都不适用。
七、图 Graph
树就是特殊化的图。
- 非线性表结构
- 可双向
图中的元素叫作顶点(vertex),图中的一个顶点可以与任意其他顶点建立连接关系,把这种建立的关系叫边(edge)。
图的应用
- 微信(无向图)
顶点:用户
边:互加好友
顶点的度:用户有多少个好友 - 微博:单向社交关系(有向图)
入度:粉丝数
出度:关注数
实现:跳表、邻接表、逆邻接表、哈希算法,除此之外还可以利用外部存储,如数据库。
-
QQ亲密度(带权图)
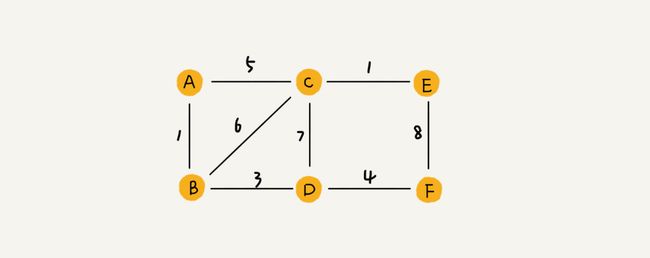 每条边都有一个权重 weight
每条边都有一个权重 weight
在内存中如何存储图
1. 邻接矩阵 Adjacency Matrix
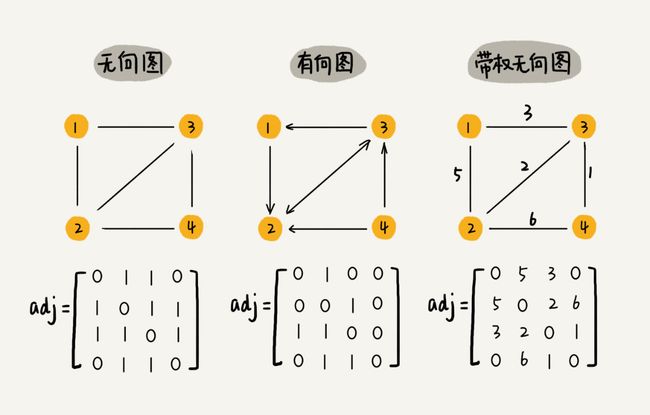
优点:
1. 简单直观
2. 便于获取顶点之间的关系
3. 可以将很多图的运算转换成矩阵之间的运算。比如用Floyd-Warshall 算法求解最短路径,就是利用矩阵循环相乘若干次得到结果。
缺点:比较浪费存储空间
如果存储的是稀疏图(Sparse Matrix),即顶点很多,但每个顶点的边很少,对应到矩阵里就都是0,那邻接矩阵的存储方法就更加浪费空间了。比如:微信。
2. 邻接表 Adjacency List

可以将邻接表中的链表改成红黑树或其他更高效的动态数据结构,如平衡二叉树、跳表、散列表。
图的搜索
- 深度优先搜索 Depth-First-Search
回溯思想:递归
图上的深度优先搜索算法的时间复杂度是 O(E),E 表示边的个数。
深度优先搜索算法的消耗内存主要是 visited、prev 数组和递归调用栈。visited、prev 数组的大小跟顶点的个数 V 成正比,递归调用栈的最大深度不会超过顶点的个数,所以总的空间复杂度就是 O(V)。
-
广度优先搜索 Breadth-First-Search
思想:适用于非加权图中查找最短路径
 BFS是“地毯式”层层推进的搜索
BFS是“地毯式”层层推进的搜索
广度优先搜索的时间复杂度也可以简写为O(E)。广度优先搜索的空间消耗主要在几个辅助变量 visited 数组、queue 队列、prev 数组上。这三个存储空间的大小都不会超过顶点的个数,所以空间复杂度是 O(V)。
优化:检查完一个元素之后,应将其标记为已检查或使用列表记录,以防死循环。
应用:
- 给你一个用户,找出这个用户的所有三度好友关系;
- 编写拼写检查器,计算最少编辑多少个地方就可将错拼的单词改成正确的单词;
- 编写跳棋AI,计算最少走多少步就可获胜。
- A*
- IDA*
八、递归 Recursion
关键:写出递推公式,找到终止条件
递归需要满足的三个条件
- 一个问题的解可以分解为几个子问题的解
- 该问题与分解之后的子问题,除了数据规模不同,求解思路完全一致
- 存在递归终止条件
递归优点
高效,简洁
递归注意事项
- 警惕堆栈溢出
解决方案:限制递归调用的最大深度
该解决方案不能完全解决问题,因为最大允许的递归深度跟当前线程剩余的栈空间大小有关,事前无法计算。如果实时计算,代码过于复杂,就会影响代码的可读性。如果深度大小比较小,可以用该方案。
- 警惕重复计算
解决方案:通过一个数据结构(比如散列表)来保存已经求解过的f(k)。当递归调用f(k)时,先看下是否已经求解过了。如果是,则直接从散列表中取值返回,不需要重复计算。 - 函数调用的数量较大时,就会积聚成一个可观的时间成本。
- 递归调用一次就会在内存栈中保存一次现场数据,在分析递归代码空间复杂度时,需要额外考虑这部分花销。
注:几乎所有的递归代码都可以改为迭代循环的非递归写法,但本质没有变。
递归代码调试
- 打印日志发现,递归值
- 结合条件断点进行调试
递归代码常见业务场景应用
- 给定用户ID,查找这个用户的最终推荐人
该问题中要处理由于数据库里存在脏数据,而产生的无限递归问题。解决方式是自动检测环的存在。
九、散列表 Hash Table
散列思想
散列表用的是数组支持按照下标随机访问数据的时候,时间复杂度是O(1)的特性,通过散列函数把元素的键值映射为下标,然后将数据存储在数组中对应的下标的位置。所以,散列表其实是数组的一种扩展。
- 用来标识的字段叫键(key)或关键字。
- 把标识字段转化为数组下标的映射方法就叫做散列函数。
- 散列函数计算得到的值叫做散列值。
散列函数的设计
可以把它定义成hash(key),表示经过散列函数计算得到的散列值。
散列函数设计的基本要求:
- 散列函数计算得到的散列值是一个非负整数;
- 如果 key1 = key2,那 hash(key1) == hash(key2);
- 如果 key1 ≠ key2,那 hash(key1) ≠ hash(key2)。
注:即便像业界著名的MD5、SHA、CRC等哈希算法,也无法完全避免散列冲突。
解决散列冲突
- 开放寻址法
- 线性探测 Linear Probing
注意:不能单纯地把要删除的元素设置为空,因为如果这个空闲位置是后来删除的,就会导致原来的查找算法失效。解决方案是,特别处理将删除的元素,标记为deleted。
散列表插入数据越来越多时,线性探测的时间就会越来越久。 - 二次探测 Quadratic probing
探测的步长是原来的“二次方”,探测的下标序列就是 hash(key)+0,hash(key)+1^2, hash(key)+2^2 ... - 双重散列 Double hashing
使用一组散列函数hash1(key),hash2(key),hash3(key)…先用第一个散列函数,如果计算得到的存储位置已经被占用,再用第二个散列函数,依次类推,直到找到空闲的存储位置。
- 线性探测 Linear Probing
装载因子用来表示空位的多少,计算公式为:
散列表的装载因子 = 填入表中的元素个数 / 散列表的长度。
装载因子越大,说明空闲位置越少,冲突发生的可能性越大,散列表的性能越低。
不错的经验规则是:当填装因子大于0.7,就给散列表 resizing。
- 链表法
一种更加常用的散列冲突解决办法,比开放寻址法简单很多。在散列表中,每个“桶(bucket)”或者“槽(slot)”会对应一条链表,所有散列值相同的元素我们都放到相同槽位对应的链表中。
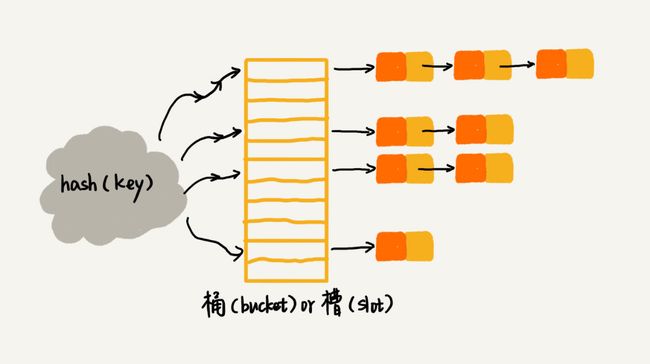 链表法解决散列冲突原理
链表法解决散列冲突原理
插入:通过散列函数计算出对应的散列槽位,将其插入到对应链表。时间复杂度O(1)
查找、删除:通过散列函数计算出对应的散列槽位,遍历链表查找或者删除。时间复杂度跟链表的长度k成正比,即O(k)。
散列比较均匀的散列函数来说,理论上讲,
k=n/m,其中 n 表示散列中数据的个数,m 表示散列表中“槽”的个数。
散列冲突解决方法的选择
开放寻址法
优点:
- 有效利用CPU
- 序列化简单
缺点:
- 冲突代价高
- 较浪费内存空间
适用范围:当数据量比较小、装载因子小的时候,适合采用开放寻址法。这也是 Java 中的使用开放寻址法解决散列冲突的原因。
链表法
优点:
- 内存利用率高
- 对大装载因子的容忍度更高
缺点:
- 储存比较小的对象,比较消耗内存
- 对CPU缓存不友好
大部分情况下,链表法更加普适。可以将链表法改造为其他高效的动态数据结构,比如:跳表、红黑树。
设计工业级散列表
满足条件:
- 不复杂,支持快速的查询、插入、删除操作;
- 内存占用合理,不能浪费过多的内存空间;
- 生成的值随机、平均,性能稳定,在极端情况下,散列表的性能也不会退化到无法接受的情况。
设计思路:
- 合适的散列函数
- 定义装载因子阈值,并且设计动态扩容策略
- 选择合适的散列冲突解决方法
避免低效的扩容:为了解决一次性扩容耗时过多的情况,可以通过这样均摊的方法,将一次性扩容的代价,均摊到多次插入操作中,就避免了一次性扩容耗时过多的情况。这种实现方式,任何情况下,插入一个数据的时间复杂度都是 O(1)。
为何散列表和链表经常一块使用
- 散列表是无规律存储的,无法支持按照某种顺序快速地遍历数据。
- 将散列表中的数据拷贝到数组中,然后排序,再遍历,就可以按照顺序遍历散列表中的数据。
- 散列表是动态数据结构,每当希望按顺序遍历散列表中的数据的时候,都需要先排序,那效率势必会很低。
以上,就是经常将散列表和双向链表(或者跳表)结合在一起使用的原因。
应用:
- LRU Cache 缓存淘汰算法
- Redis 有序集合
- Java LinkedHashMap
- YYMemoryCache
- DNS resolution
- 查重
- 创建搜索引擎:反向索引(inverted index)
散列表中,将单词或记录作为索引,将文档ID作为记录的数据结构被称为反向索引(inverted index)。
哈希算法
MD5、SHA
- 从哈希值不能反向推导出原始数据(所以哈希算法也叫单向哈希算法
- 对输入数据非常敏感,哪怕原始数据只修改了一个 Bit,最后得到的哈希值也大不相同;
- 散列冲突的概率要很小,对于不同的原始数据,哈希值相同的概率非常小;
- 哈希算法的执行效率要尽量高效,针对较长的文本,也能快速地计算出哈希值。
哈希算法的应用:
- 安全加密
- 唯一标识:大数据信息摘要
如:开头,中间,最后各取100字节,MD5加密 - 数据校验:校验数据的完整性和正确性,字符串匹配
- 散列函数
简单,追求效率 - 负载均衡:实现会话粘滞的负载均衡策略
- 数据分片:多机分布式处理
- 分布式存储:一致性哈希算法
其他用户信息安全防范:
- 防范字典攻击
引入一个salt,跟用户的密码组合在一起,增加密码的复杂度。拿组合之后的字符串来做哈希算法加密,将它存储到数据库中,进一步增加破解的难度。
安全和攻击是一种博弈关系,不存在绝对的安全。所有的安全措施,只是增加攻击的成本而已。
十、并查集 Disjoint Sets
并查集思想
并查集是一种用于处理一些不交集合(Disjoint Sets)的合并(merge)和查询(find)问题的数据结构。
应用
- 判断无向图中是否出现回路
- Kruskal法最小生成树
十一、Trie树
Trie树思想
又称字典树,是一种多叉树结构。比较小耗内存,是空间换时间的典型例子。
应用
- 查找前缀匹配的字符串
- 搜索关键词提示
十二、算法思想
贪心算法 Greedy algorithom
思想:每步都选择局部最优解。
时间复杂度:O(n^2)
应用:分糖果、钱币找零、区间覆盖
属于贪心算法的有:
霍夫曼编码 Huffman Coding
实现数据压缩编码,有效节省数据存储空间Prim
Kruskal 最小生成树算法
-
Dijkatra's algorithm 单源最短路径算法
如果图中包含负权边,应使用贝尔曼-福德算法。
思想:适用于有向无环图
应用:加权图 中计算某种度量指标最小的策略
步骤:- 找出最短时间内前往的节点
- 更新该节点邻居的开销
- 对所有节点重复这个过程
- 计算最终路径
注意识别NP完全问题,要使用近似求解来解决。
分治算法 Divide and conquer
核心思想:分而治之
应用:
-
短时间内解决海量数据处理问题:MapReduce
MapReduce也是特殊的并行算法,即分布式算法。可让算法在多台计算机上运行,可以通过Apache Hadoop实现。MapReduce给予两个简单的理念:映射(map)函数和归并函数(reduce),映射是将一个数组转化成另一个数组,而归并是将一个数组转换为一个元素。
降低问题求解的时间复杂度
习题:
- LeetCode169.求众数
回溯算法 Backtracking
回溯法就是对隐式图的深度优先搜索算法。
核心思想:解决广义的搜索问题,非常适合用递归来实现。利用剪枝,我们并不需要穷举搜索所有的情况,从而提高搜索效率。
应用:
- 数独
- 八皇后问题
- 0-1背包问题
- 图否着色
- 旅行商问题
- 全排列
- 正则表达式
动态规划 Dynamic Programming
核心思想:把问题分解为多个阶段,每个阶段对应一个决策。记录每一个阶段可达的状态集合,然后通过当前阶段的状态集合,来推导下一个阶段的状态集合,动态地往前推进。
应用:
- 0-1 背包问题
- 双十一凑单问题
- 最小路径和
- 查找两个字符串的最长公共子序列
- 一个数据序列的最长递增子序列
-
git diff命令 - Word
习题:
- LeetCode121.买卖股票的最佳时机
动态规划需要满足每个子问题都是离散的,即不依赖于其他子问题时使用,每一种动态方案都涉及网格。动态规划的本质其实是空间换时间。
拓扑排序 Topological Sorting
思想:基于有向无环图
实现:
- Kahn 算法
从图中,找出一个入度为 0 的顶点,将其输出到拓扑排序的结果序列中,并且把这个顶点可达的顶点的入度都减 1。循环执行上面的过程,直到所有的顶点都被输出。最后输出的序列,就是满足局部依赖关系的拓扑排序。 - DFS 深度优先搜索算法
遍历图中的所有顶点,而非只是搜索一个顶点到另一个顶点的路径。- 通过邻接表构造逆邻接表
- 递归处理每个顶点
应用:
- 确定代码文件的编译依赖关系
- 检测环的存在
- 根据图创建一个有序列表
K最近临算法 k-nearest neighbours,KNN
过程:
- 分类:编组
- 特征提取:物品 -> 一系列可比较的数字。
在挑选合适的特征方面,没有放之四海皆准的法则。
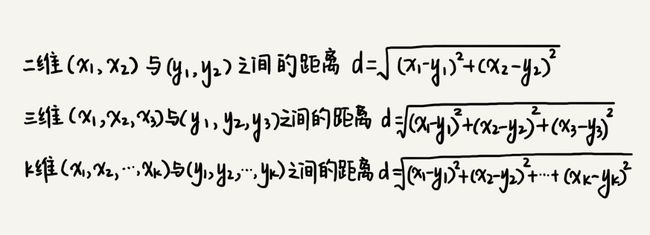
计算两点的距离,可以使用毕达哥拉斯公式:
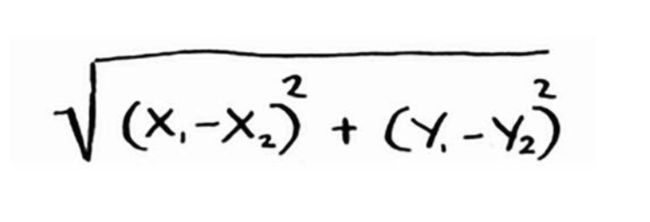 毕达哥拉斯公式
毕达哥拉斯公式
实际开发中经常使用余弦相似度(cosine similarity),余弦相似度不计算两个矢量的距离,而比较它们的角度。
- 回归:预测结果
应用:
- OCR 算法:光学字符识别(optical character recognition)
OCR的第一步是查看大量的数字图像并提取特征,这被称为训练(training)。 - 垃圾邮件过滤器
算法:朴素贝叶斯分类器(Naive Bayes classifier) - 预测股票市场 - 这几乎是不可能完成的任务~
傅里叶变换
傅里叶变换非常适合用于处理数字信号,包括用来压缩音乐和音频频率分解。首先将音频文件分解为音符,该算法能准确地提取出对整个音乐贡献大的音符,并弱化不重要的音符。
数字信号不只是音乐,还可以处理图片的压缩格式JPG或者用来地震预测和DNA分析。
并行算法
并行算法与海量数据处理相关,能极大改善性能和可扩展性。
在最佳情况下,排序算法的速度大致为O(nlogn)。众所周知,对数组 进行排序时,除非使用并行算法,否则运行时间不可能为O(n)。对数组进行排序时,快速排序的并行版本所需的时间为O(n)。
设计并行算法很难,而且提升速度并非线性的,原因是:
- 并行性管理开销:例如,分配处理之后合并也是需要时间的。
- 负载均衡
位图 BitMap
位图思路
通过位运算,每一个元素用一个二进制位bit表示,通过数组下标查询。
应用
- 爬虫避免重复爬取
- 布隆过滤器:位图的改进
布隆过滤器 BloomFilter
布隆过滤器是一个很长的二进制向量和一系列随机和复杂的hash函数,可以用于检索一个元素是否在一个集合中,是一种概率型数据结构。
优点:占用的存储空间少。
应用:
- Reddit 检查文章是否发布过
- Google 检查网站是否被搜集过
- 为用户提示可能的恶意网站:可能将正常网站标记为疑似恶意误判(由经过K个hash函数处理导致),但不会漏报。
- 统计大型网站的UV数
HyperLogLog
HyperLogLog是一种类似于布隆过滤器的算法。
场景:Google要计算用户执行的不同搜索的数量,或者Amazon要计算当天用户浏览的不同商品的数量,需要耗用大量的空间。对Google来说,必须有一个日志,其中包含用户执行的不同搜索。有用户执行搜索时,Google 必须判断该搜索是否包含在日志中:如果答案是否定的,就必须将其加入到日志中。即便只记录一天的搜索,这种日志也非常之大。
HyperLogLog近似地计算集合中不同的元素数,与布隆过滤器一样,它不能给出准确的答案, 但也八九不离十,而占用的内存空间却少得多。
SHA 算法
前面提到的散列算法中的一种,安全散列算法(secure hash algorithm,SHA)。重要特征是局部不敏感。
应用:
- 大文件比较
- 检查密码:SHA-2或SHA-3、此外还有bcrypt
局部敏感散列函数:Simhash。可以来判断网页是否已搜集、论文查重、过滤版权纠纷的内容。
Diffie-Hellman
- 公钥
- 私钥
替代:RSA
线性规划
线性规划用于在给定约束条件下最大限度地改善指定的指标,解决最优化问题。
思想:Simplex算法
最短路径 Shortest Path Algorithm
单源最短路径算法:
Dijkstra 算法
利用堆操作完成
概率统计 - 朴素贝叶斯分类器 Naive Bayes classifier
过滤器的两种方法:
- 基于黑名单的过滤器
- 基于规则的过滤器
- 包含特殊词汇
- 群发号码
- 包含回拨的联系号码
- 格式花哨、内容很长
- 符合已知垃圾短信的模板
超过某个阈值,才会被判重。可以基于概率统计的方法,找出单词出现在垃圾短信中的概率。
弊端:垃圾短信发送人员针对性躲避规则
-
基于概率统计的过滤器(推荐)
 朴素贝叶斯算法
朴素贝叶斯算法
结合场景和以上三种方法,不断调整策略,才会使判定更准确。
向量空间 - 欧几里得距离 Euclidean distance
歌曲推荐方法:
-
基于相似用户推荐
 欧几里得距离
欧几里得距离 - 基于相似歌曲推荐
对于两首歌,如果喜欢听的人群都是差不多的,那侧面就可以反映出,这两首歌相似。
B+树
二叉查找树->B树->B+树
思路:构建m叉树
应用:数据库的索引
优点:降低了磁盘I/O操作
特点:
- 每个节点中子节点的个数不能超过 m,也不能小于 m/2(B树)
- 根节点的子节点个数可以不超过 m/2,这是一个例外
- m 叉树只存储索引,并不真正存储数据。
- 通过链表将叶子节点串联在一起,这样可以方便按区间查找
- 一般情况,根节点会被存储在内存中,其他节点存储在磁盘中。
伸展树 Splay Tree
一种能够自我平衡的二叉查找树,它能在均摊的时间内完成基于伸展操作的插入、查找、修改和删除操作。