Downhill simplex 方法又称为Nelder-Mead算法、Amoeba方法,由Spendley、Hext和Himsworth于1962年提出;Nelder和Mead 1965年进行了改进。该方法是一种不使用导数求解无约束极小化问题的直接搜索方法。针对的问题是:
是上的连续函数。
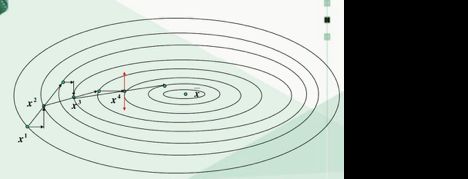
算法思想是集合迭代式的搜索,即从集合每一个集合都是一个单纯形,每次迭代使得单纯形的顶点目标函数值下降。什么是Simplex单纯形呢?举个例子,在一维中,一个线段就是一个单纯形,在二维中,一个三角形为一个单纯形,三维中一个四面体为一个单纯形.......

具体定义为:
设,如果线性无关,则的凸组合称为由构成的单纯形,记,即称为单纯形的顶点。
Downhill Simplex几个关键的定义:
可称为劣点。
形心点:
反射点:,一般取1;
Downhill Simplex一般规则为:
如果,说明反射点比最小顶点还要小,这种情况,需要对单纯形进行延伸:
延伸点:,一般取2;若,则用代替构建新的单纯形,否则用代替构建新的单纯形。
(这里其实很很好理解,延伸点比反射点有更大的步长,如果比原来的单纯形的最小值还要小,将劣点替换点,如果延伸点没有比原单纯形的最小值小,那用反射点替换劣点,确保替换后的单纯形,替换后的点最小)。
如果,说明反射点比最小顶点要大,这种情况,需要对单纯形进行收缩。收缩有分为两种情况:
- 如果对于任意顶点,不包含劣点都小于或等于且,则令收缩点:,;若,则用代替构建新的单纯形;
(这种情况下,相当于反射点和劣点之间有一个谷,且极小值偏向反射点这边。)
2 . 如果,则收缩点定义为:,,若,则用代替构建新的单纯形;
(这种情况下,依然是反射点和劣点之间有一个谷,且极小值偏向劣点这边)
规则都这里,还有一种情况,就是上述的两种情况的收缩点大于等于劣点情况:
当收缩点大于等于劣点时,则需要对单纯形进行压缩,向点进行棱长减半,即.
(这种情况下,收缩点的函数值大于等于劣点的函数值,说明极小值在单纯形的内部的可能性更高,将原单纯形向最小顶点进行压缩,构造新的单纯形)
function [x_min,f_min] = AmoebaMethod(func,x0,options)
if nargin<3
options.tol = 1e-12;
options.iterNum = 1000;
options.bracketMethod = '';
options.linearSrcMethod = '';
options.plot2.Flag = 0;
options.plot2.x = [];
options.plot2.y = [];
options.plot2.z = [];
end
tol = options.tol;
iterNum = options.iterNum;
plot2 = options.plot2;
if length(x0)~=2
plot2.Flag = 0;
end
x_min = x0;
f_min = func(x0);
%step1构建初始单纯形
n = length(x0);
E = eye(length(x0));
S = zeros(n,n+1);
f_S = zeros(1,n+1);
S(:,1) = x0;
f_S(1) = f_min;
sigma = 0.5;
afa = 1;
beta = 2;
gama = 0.5;
for i=1:1:n
S(:,i+1) = S(:,i)+sigma.*E(:,i);
f_S(i+1) = func(S(:,i+1));
end
[f_S,sIdx]=sort(f_S,'descend'); %将顶点按照函数值进行排序,劣点Vh放在最前面
S = S(:,sIdx);
if plot2.Flag == 1
figure,subplot(1,2,1),axis equal, hold on;
contourf(plot2.x,plot2.y,plot2.z,30,'linestyle','-')
colormap('jet');
plot([S(1,1),S(1,2),S(1,3),S(1,1)],[S(2,1),S(2,2),S(2,3),S(2,1)],'-o');
tempf =f_min;
end
while(iterNum)
Vh = S(:,1);f_Vh = f_S(1); %step2 计算劣点和形心点
Vl = S(:,end);f_Vl = f_S(end);
Vx = mean(S(:,2:end),2);
Vr = Vx+afa.*(Vx-Vh);f_Vr = func(Vr);%step 3 计算反射点
if f_VrDownhill Simplex 方法就像变形虫在一个山谷里面,为了达到谷底,变形虫通过几个顶点的试探,不断的改变自己的形状,或伸缩,或收缩。所以这种方法又叫Amoeba方法。其收敛速度较慢,但对于目标函数的要求并不苛刻,在不确定具体表达式的情况下可以采用此方法。
模式搜索
直接方法,最后再简单介绍一种简单的搜索方法,叫模式搜索。模式搜索和 powell 方法非常相似,也称作步长加速法,hooke-jeeves 法,比 powell 方法更早提出(1961 年),其是对坐标轮换法的改进。基本思想是从初始基点开始,交替实施两 种搜索:轴向搜索和模式搜索。轴向搜索依次沿 个坐标轴的方向进行,用来确定新的基点 和有利于函数值下降的方向。模式搜索则沿着相邻两个基点的连线方向进行,试图使函数值 下降更快。收敛速度是线性的,原始的一维搜索采用的是后退法,也可以采用其他一维搜索 方法来加速迭代。