以SurfaceFlinger服务为例
SurfaceFlinger进程支持Binder IPC的准备工作
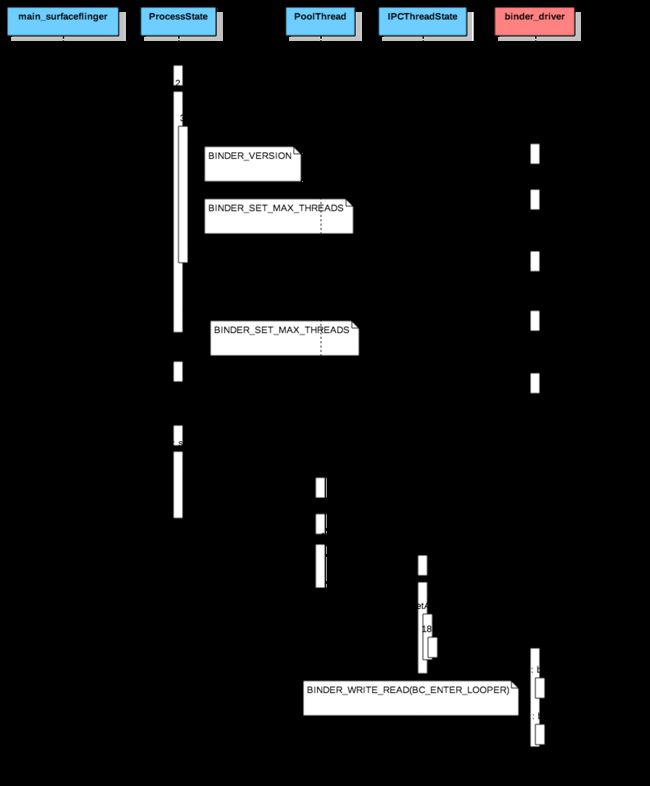
下面从SurfaceFlinger进程的main方法开始分析。
int main(int, char**) {
signal(SIGPIPE, SIG_IGN);
// When SF is launched in its own process, limit the number of
// binder threads to 4.
// 创建ProcessState,设置binder驱动请求创建的最大binder线程数
ProcessState::self()->setThreadPoolMaxThreadCount(4);
// start the thread pool
sp ps(ProcessState::self());
// 启动binder线程,等待客户端的请求
ps->startThreadPool();
......
}
首先看ProcessState对象的创建。
// 单例模式
sp ProcessState::self()
{
// 访问ProcessState需要持有锁
Mutex::Autolock _l(gProcessMutex);
if (gProcess != NULL) {
return gProcess;
}
// 创建ProcessState
gProcess = new ProcessState;
return gProcess;
}
下面看ProcessState的构造方法
ProcessState::ProcessState()
// 打开binder驱动
: mDriverFD(open_driver())
, mVMStart(MAP_FAILED)
, mThreadCountLock(PTHREAD_MUTEX_INITIALIZER)
, mThreadCountDecrement(PTHREAD_COND_INITIALIZER)
, mExecutingThreadsCount(0)
, mMaxThreads(DEFAULT_MAX_BINDER_THREADS)
, mStarvationStartTimeMs(0)
, mManagesContexts(false)
, mBinderContextCheckFunc(NULL)
, mBinderContextUserData(NULL)
, mThreadPoolStarted(false)
// binder线程名从"1"开始
, mThreadPoolSeq(1)
{
if (mDriverFD >= 0) {
// mmap the binder, providing a chunk of virtual address space to receive transactions.
// 映射虚拟地址空间用于接受binder数据
mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
if (mVMStart == MAP_FAILED) {
// *sigh*
ALOGE("Using /dev/binder failed: unable to mmap transaction memory.\n");
close(mDriverFD);
mDriverFD = -1;
}
}
LOG_ALWAYS_FATAL_IF(mDriverFD < 0, "Binder driver could not be opened. Terminating.");
}
对于打开binder驱动以及映射虚拟地址空间的过程不再赘述。
下面看setThreadPoolMaxThreadCount()的实现
status_t ProcessState::setThreadPoolMaxThreadCount(size_t maxThreads) {
status_t result = NO_ERROR;
// 通过ioctl设置binder驱动能够请求创建的最大binder线程数
if (ioctl(mDriverFD, BINDER_SET_MAX_THREADS, &maxThreads) != -1) {
mMaxThreads = maxThreads;
} else {
result = -errno;
ALOGE("Binder ioctl to set max threads failed: %s", strerror(-result));
}
return result;
}
下面看启动binder线程池,等待客户端请求。
void ProcessState::startThreadPool()
{
AutoMutex _l(mLock);
if (!mThreadPoolStarted) {
mThreadPoolStarted = true;
// 启动binder线程, 参数为true表示是binder主线程
spawnPooledThread(true);
}
}
下面看spawnPooledThread()的实现
void ProcessState::spawnPooledThread(bool isMain)
{
if (mThreadPoolStarted) {
// 设置Binder线程的名字
String8 name = makeBinderThreadName();
ALOGV("Spawning new pooled thread, name=%s\n", name.string());
sp t = new PoolThread(isMain);
// 启动binder线程
t->run(name.string());
}
}
当binder线程运行后,执行PoolThread的threadLoop()方法。
virtual bool threadLoop()
{
// 为binder线程创建IPCThreadState,加入binder线程池
IPCThreadState::self()->joinThreadPool(mIsMain);
// loop结束
return false;
}
下面首先看IPCThreadState的创建
IPCThreadState* IPCThreadState::self()
{
// gHaveTLS为全局标志,binder线程共享
if (gHaveTLS) {
restart:
const pthread_key_t k = gTLS;
// 获取binder线程私有value
IPCThreadState* st = (IPCThreadState*)pthread_getspecific(k);
if (st) return st;
// 创建IPCThreadState
return new IPCThreadState;
}
if (gShutdown) {
ALOGW("Calling IPCThreadState::self() during shutdown is dangerous, expect a crash.\n");
return NULL;
}
pthread_mutex_lock(&gTLSMutex);
if (!gHaveTLS) {
// 第一个binder线程创建gTLS,gTLS为进程中的binder线程共享,但gTLS对应的value为线程私有
int key_create_value = pthread_key_create(&gTLS, threadDestructor);
if (key_create_value != 0) {
pthread_mutex_unlock(&gTLSMutex);
ALOGW("IPCThreadState::self() unable to create TLS key, expect a crash: %s\n",
strerror(key_create_value));
return NULL;
}
gHaveTLS = true;
}
pthread_mutex_unlock(&gTLSMutex);
goto restart;
}
下面看IPCThreadState的构造函数
IPCThreadState::IPCThreadState()
: mProcess(ProcessState::self()),
mMyThreadId(gettid()),
mStrictModePolicy(0),
mLastTransactionBinderFlags(0)
{
// 设置gTLS对应的IPCThreadState(binder线程私有)
pthread_setspecific(gTLS, this);
clearCaller();
// 设置接收binder驱动发送的IPC数据的Parcel容量
mIn.setDataCapacity(256);
// 设置存储发送给binder驱动IPC数据的Parcel容量
mOut.setDataCapacity(256);
}
回到threadLoop()下面看joinThreadPool()的实现
void IPCThreadState::joinThreadPool(bool isMain)
{
LOG_THREADPOOL("**** THREAD %p (PID %d) IS JOINING THE THREAD POOL\n", (void*)pthread_self(), getpid());
// 这里isMain为true,mOut写入命令协议BC_ENTER_LOOPER
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
// This thread may have been spawned by a thread that was in the background
// scheduling group, so first we will make sure it is in the foreground
// one to avoid performing an initial transaction in the background.
set_sched_policy(mMyThreadId, SP_FOREGROUND);
status_t result;
do {
processPendingDerefs();
// now get the next command to be processed, waiting if necessary
// 处理客户端请求或者等待客户端请求
result = getAndExecuteCommand();
if (result < NO_ERROR && result != TIMED_OUT && result != -ECONNREFUSED && result != -EBADF) {
ALOGE("getAndExecuteCommand(fd=%d) returned unexpected error %d, aborting",
mProcess->mDriverFD, result);
abort();
}
// Let this thread exit the thread pool if it is no longer
// needed and it is not the main process thread.
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
LOG_THREADPOOL("**** THREAD %p (PID %d) IS LEAVING THE THREAD POOL err=%p\n",
(void*)pthread_self(), getpid(), (void*)result);
// binder线程退出,向binder驱动发送BC_EXIT_LOOPER
mOut.writeInt32(BC_EXIT_LOOPER);
talkWithDriver(false);
}
下面看getAndExecuteCommand()的实现
status_t IPCThreadState::getAndExecuteCommand()
{
status_t result;
int32_t cmd;
// 与binder驱动交互
result = talkWithDriver();
if (result >= NO_ERROR) {
size_t IN = mIn.dataAvail();
if (IN < sizeof(int32_t)) return result;
cmd = mIn.readInt32();
......
// 处理客户端请求
result = executeCommand(cmd);
......
}
return result;
}
下面看talkWithDriver()的实现
// 参数doReceive默认为true
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
if (mProcess->mDriverFD <= 0) {
return -EBADF;
}
binder_write_read bwr;
// Is the read buffer empty?
// 这里needRead为true
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
// We don't want to write anything if we are still reading
// from data left in the input buffer and the caller
// has requested to read the next data.
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
// binder IPC数据的大小与地址
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
// 接收binder驱动返回的数据
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
......
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
IF_LOG_COMMANDS() {
alog << "About to read/write, write size = " << mOut.dataSize() << endl;
}
#if defined(__ANDROID__)
// 进入binder驱动
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
#else
err = INVALID_OPERATION;
#endif
......
}
......
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
IF_LOG_COMMANDS() {
TextOutput::Bundle _b(alog);
alog << "Remaining data size: " << mOut.dataSize() << endl;
alog << "Received commands from driver: " << indent;
const void* cmds = mIn.data();
const void* end = mIn.data() + mIn.dataSize();
alog << HexDump(cmds, mIn.dataSize()) << endl;
while (cmds < end) cmds = printReturnCommand(alog, cmds);
alog << dedent;
}
return NO_ERROR;
}
......
}
下面看binder_ioctl()
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
// arg是用户态binder_write_read地址
void __user *ubuf = (void __user *)arg;
......
switch (cmd) {
case BINDER_WRITE_READ:
// 处理BINDER_WRITE_READ
ret = binder_ioctl_write_read(filp, cmd, arg, thread);
if (ret)
goto err;
break;
......
}
......
}
下面看binder_ioctl_write_read()
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
......
// 用户态binder_write_read拷贝至内核态
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
......
if (bwr.write_size > 0) {
// 向binder驱动发送命令,这里是BC_ENTER_LOOPER
ret = binder_thread_write(proc, thread,
bwr.write_buffer,
bwr.write_size,
&bwr.write_consumed);
trace_binder_write_done(ret);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
if (bwr.read_size > 0) {
// 从binder驱动读取请求,可能睡眠
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
trace_binder_read_done(ret);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
......
// 内核态binder_write_read拷贝至用户态
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
out:
return ret;
}
下面首先看binder_thread_write()的实现
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
struct binder_context *context = proc->context;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
......
while (ptr < end && thread->return_error == BR_OK) {
// 获取binder命令协议
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
trace_binder_command(cmd);
// 更新binder IPC统计信息
if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
binder_stats.bc[_IOC_NR(cmd)]++;
proc->stats.bc[_IOC_NR(cmd)]++;
thread->stats.bc[_IOC_NR(cmd)]++;
}
switch (cmd) {
case BC_INCREFS:
case BC_ACQUIRE:
......
case BC_ENTER_LOOPER:
binder_debug(BINDER_DEBUG_THREADS,
"%d:%d BC_ENTER_LOOPER\n",
proc->pid, thread->pid);
if (thread->looper & BINDER_LOOPER_STATE_REGISTERED) {
thread->looper |= BINDER_LOOPER_STATE_INVALID;
binder_user_error("%d:%d ERROR: BC_ENTER_LOOPER called after BC_REGISTER_LOOPER\n",
proc->pid, thread->pid);
}
// 更新binder线程looper状态
thread->looper |= BINDER_LOOPER_STATE_ENTERED;
break;
}
// binder驱动消耗的数据大小
*consumed = ptr - buffer;
}
return 0;
}
binder驱动处理命令协议BC_ENTER_LOOPER只是修改binder线程的looper状态,下面看binder_thread_read()的实现
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
// buffer存放binder驱动返回用户态的IPC数据
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
if (*consumed == 0) {
// BR_NOOP为空操作
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
retry:
// binder线程是否有待处理的工作
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
......
// 更新binder looper状态
thread->looper |= BINDER_LOOPER_STATE_WAITING;
// binder线程没有待处理的工作,增加进程中空闲的binder线程计数
if (wait_for_proc_work)
proc->ready_threads++;
......
if (wait_for_proc_work) {
if (!(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED))) {
binder_user_error("%d:%d ERROR: Thread waiting for process work before calling BC_REGISTER_LOOPER or BC_ENTER_LOOPER (state %x)\n",
proc->pid, thread->pid, thread->looper);
wait_event_interruptible(binder_user_error_wait,
binder_stop_on_user_error < 2);
}
binder_set_nice(proc->default_priority);
if (non_block) {
if (!binder_has_proc_work(proc, thread))
ret = -EAGAIN;
} else
// binder线程空闲,进入睡眠等待binder_has_proc_work(proc, thread)为true
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else {
if (non_block) {
if (!binder_has_thread_work(thread))
ret = -EAGAIN;
} else
// binder线程进入睡眠等待binder_has_thread_work(thread)为true
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
}
......
}
至此,binder线程进入睡眠等待客户端的请求。
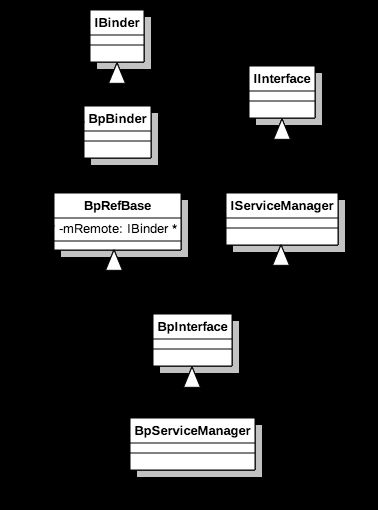
ServiceManager代理对象的获取
类图
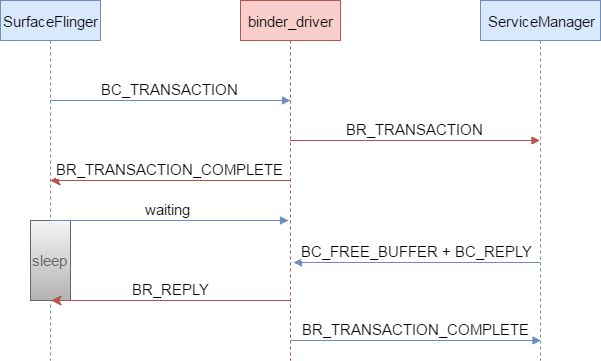
SurfaceFlinger向ServiceManager发送PING_TRANSACTION请求的过程
ServiceManager处理完PING_TRANSACTION请求后回复SurfaceFlinger的过程
小结
ServiceManager代理对象的获取过程与服务注册或者服务获取类似,这里不详细讨论。
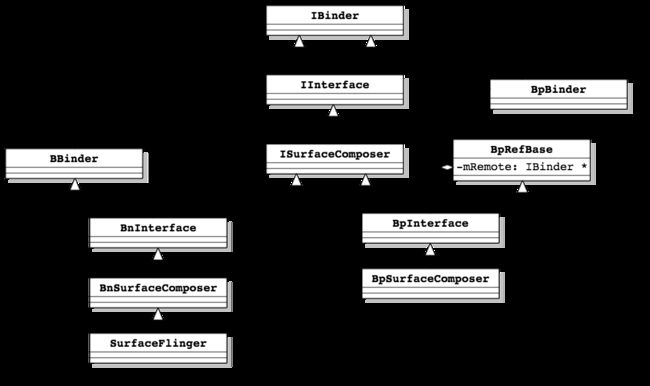
SurfaceFlinger服务注册
SurfaceFlinger的类图
SurfaceFlinger向binder驱动发送ADD_SERVICE_TRANSACTION(3)请求
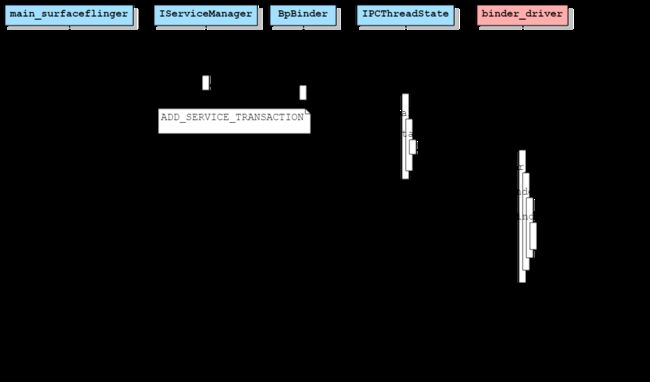
下面从SurfaceFlinger的main()方法开始分析
int main(int, char**) {
......
// publish surface flinger
sp sm(defaultServiceManager());
// sm为BpServiceManager对象
// SurfaceFlinger::getServiceName()返回"SurfaceFlinger"
// flinger为SurfaceFlinger对象的强指针
sm->addService(String16(SurfaceFlinger::getServiceName()), flinger, false);
......
}
下面看BpServiceManager的addService()方法
virtual status_t addService(const String16& name, const sp& service,
bool allowIsolated)
{
Parcel data, reply;
// 封装IPC数据data, 以4字节对齐
// IServiceManager::getInterfaceDescriptor()返回"android.os.IServiceManager"
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name);
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
// remote()返回BpBinder对象
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode() : err;
}
addService()首先封装IPC数据,然后调用BpBinder的transact()方法,打包后的IPC数据data如下图所示
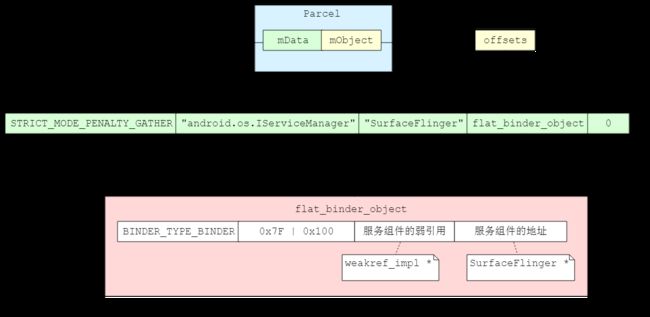
下面看BpBinder的transact()方法
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
// Once a binder has died, it will never come back to life.
if (mAlive) {
// flags默认为0
// mAlive标示服务端是否活着
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
下面看IPCThreadState的transact()方法
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck();
flags |= TF_ACCEPT_FDS;
IF_LOG_TRANSACTIONS() {
TextOutput::Bundle _b(alog);
alog << "BC_TRANSACTION thr " << (void*)pthread_self() << " / hand "
<< handle << " / code " << TypeCode(code) << ": "
<< indent << data << dedent << endl;
}
if (err == NO_ERROR) {
LOG_ONEWAY(">>>> SEND from pid %d uid %d %s", getpid(), getuid(),
(flags & TF_ONE_WAY) == 0 ? "READ REPLY" : "ONE WAY");
// 构造发往binder驱动的IPC数据mOut
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
......
// 向binder驱动发送数据并等待回复
if ((flags & TF_ONE_WAY) == 0) {
#if 0
if (code == 4) { // relayout
ALOGI(">>>>>> CALLING transaction 4");
} else {
ALOGI(">>>>>> CALLING transaction %d", code);
}
#endif
// 非ONE_WAY,也就是同步IPC
if (reply) {
// 这里reply非空
err = waitForResponse(reply);
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
......
}
......
}
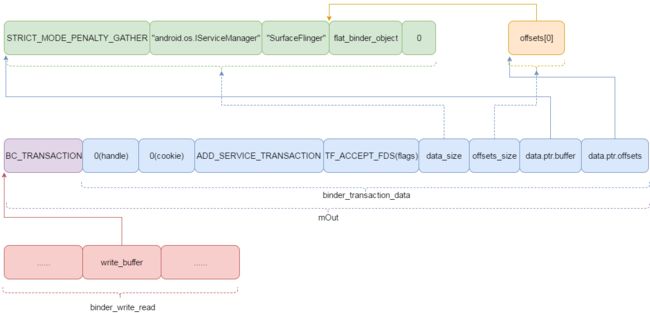
最终,发往binder驱动的IPC数据mOut格式如下图所示:
下面看waitForResponse()的实现
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
// 向binder驱动发送数据
if ((err=talkWithDriver()) < NO_ERROR) break;
err = mIn.errorCheck();
if (err < NO_ERROR) break;
if (mIn.dataAvail() == 0) continue;
cmd = (uint32_t)mIn.readInt32();
......
下面看talkWithDriver()的实现
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
if (mProcess->mDriverFD <= 0) {
return -EBADF;
}
binder_write_read bwr;
// Is the read buffer empty?
// read buffer为空,需要读取binder驱动返回的数据
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
// We don't want to write anything if we are still reading
// from data left in the input buffer and the caller
// has requested to read the next data.
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
......
// Return immediately if there is nothing to do.
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
// 记录binder驱动消耗的write_buffer的大小
bwr.write_consumed = 0;
// 记录binder驱动填充的read_buffer的大小
bwr.read_consumed = 0;
do {
......
#if defined(__ANDROID__)
// 通过ioctl向binder驱动发送命令
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
#else
err = INVALID_OPERATION;
#endif
......
} while (err == -EINTR);
......
if (err >= NO_ERROR) {
// binder驱动未消耗完传递的数据
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
// binder驱动返回的数据
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
......
}
......
}
下面看binder驱动如何将ADD_SERVICE请求转发给ServiceManager。
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
// arg为用户态binder_write_read的地址
void __user *ubuf = (void __user *)arg;
......
// 获取当前线程的binder_thread
thread = binder_get_thread(proc);
if (thread == NULL) {
ret = -ENOMEM;
goto err;
}
switch (cmd) {
case BINDER_WRITE_READ:
// 调用binder_ioctl_write_read处理BINDER_WRITE_READ
ret = binder_ioctl_write_read(filp, cmd, arg, thread);
if (ret)
goto err;
break;
......
}
......
}
下面看binder_ioctl_write_read()的实现
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
if (size != sizeof(struct binder_write_read)) {
ret = -EINVAL;
goto out;
}
// 用户态binder_write_read拷贝至内核空间
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
......
if (bwr.write_size > 0) {
// 发送IPC数据
ret = binder_thread_write(proc, thread,
bwr.write_buffer,
bwr.write_size,
&bwr.write_consumed);
trace_binder_write_done(ret);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
if (bwr.read_size > 0) {
// 返回IPC数据
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
trace_binder_read_done(ret);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
......
// 内核binder_write_read拷贝至用户空间
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
out:
return ret;
}
下面看binder_thread_write()的实现
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
// 从用户空间中读取cmd,也就是BC_TRANSACTION
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
trace_binder_command(cmd);
// 更新binder驱动状态
if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
// binder驱动状态
binder_stats.bc[_IOC_NR(cmd)]++;
// binder进程状态
proc->stats.bc[_IOC_NR(cmd)]++;
// binder线程状态
thread->stats.bc[_IOC_NR(cmd)]++;
}
switch (cmd) {
......
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
// 用户态binder_transaction_data拷贝至内核态
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
// 发送IPC数据到目标进程
binder_transaction(proc, thread, &tr, cmd == BC_REPLY);
break;
}
下面看binder_transaction()的实现
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
struct binder_transaction *t;
struct binder_work *tcomplete;
binder_size_t *offp, *off_end;
struct binder_proc *target_proc;
struct binder_thread *target_thread = NULL;
struct binder_node *target_node = NULL;
struct list_head *target_list;
wait_queue_head_t *target_wait;
struct binder_transaction *in_reply_to = NULL;
struct binder_transaction_log_entry *e;
uint32_t return_error;
// binder通信log
e = binder_transaction_log_add(&binder_transaction_log);
// 非ONE_WAY BC_TRANSACTION: 0
// ONE_WAY BC_TRANSACTION: 1
// BC_REPLY: 2
e->call_type = reply ? 2 : !!(tr->flags & TF_ONE_WAY);
// binder通信发起者的进程id以及线程id
e->from_proc = proc->pid;
e->from_thread = thread->pid;
// binder引用句柄
e->target_handle = tr->target.handle;
// 发送到目标进程的数据大小以及binder object的数量
e->data_size = tr->data_size;
e->offsets_size = tr->offsets_size;
// 这里reply = 0
if (reply) {
......
} else {
if (tr->target.handle) {
......
} else {
// binder引用句柄为0对应的binder实体为binder_context_mgr_node
target_node = binder_context_mgr_node;
if (target_node == NULL) {
return_error = BR_DEAD_REPLY;
goto err_no_context_mgr_node;
}
}
......
// binder实体对应的binder_proc也就是ServiceManager进程
target_proc = target_node->proc;
......
}
if (target_thread) {
// 特定的binder线程处理
e->to_thread = target_thread->pid;
target_list = &target_thread->todo;
target_wait = &target_thread->wait;
} else {
// binder进程处理
target_list = &target_proc->todo;
target_wait = &target_proc->wait;
}
// binder IPC目标进程id
e->to_proc = target_proc->pid;
// 创建binder_transaction
t = kzalloc(sizeof(*t), GFP_KERNEL);
if (t == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_t_failed;
}
binder_stats_created(BINDER_STAT_TRANSACTION);
// 创建binder_work
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
if (tcomplete == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_tcomplete_failed;
}
binder_stats_created(BINDER_STAT_TRANSACTION_COMPLETE);
// binder调试id
t->debug_id = ++binder_last_id;
e->debug_id = t->debug_id;
.......
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;
else
t->from = NULL;
t->sender_euid = task_euid(proc->tsk);
// 目标进程
t->to_proc = target_proc;
// 目标线程,可以为NULL
t->to_thread = target_thread;
t->code = tr->code;
t->flags = tr->flags;
t->priority = task_nice(current);
trace_binder_transaction(reply, t, target_node);
// 在目标进程中分配binder_buffer
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
if (t->buffer == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_alloc_buf_failed;
}
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id;
t->buffer->transaction = t;
t->buffer->target_node = target_node;
trace_binder_transaction_alloc_buf(t->buffer);
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);
offp = (binder_size_t *)(t->buffer->data +
ALIGN(tr->data_size, sizeof(void *)));
// 发往目标进程的用户态数据拷贝至binder_buffer
if (copy_from_user(t->buffer->data, (const void __user *)(uintptr_t)
tr->data.ptr.buffer, tr->data_size)) {
binder_user_error("%d:%d got transaction with invalid data ptr\n",
proc->pid, thread->pid);
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
// 用户态binder object偏移信息拷贝至binder_buffer
if (copy_from_user(offp, (const void __user *)(uintptr_t)
tr->data.ptr.offsets, tr->offsets_size)) {
binder_user_error("%d:%d got transaction with invalid offsets ptr\n",
proc->pid, thread->pid);
return_error = BR_FAILED_REPLY;
goto err_copy_data_failed;
}
......
off_end = (void *)offp + tr->offsets_size;
// 解析目标进程binder_buffer中的flat_binder_object对象并修改信息
for (; offp < off_end; offp++) {
struct flat_binder_object *fp;
if (*offp > t->buffer->data_size - sizeof(*fp) ||
t->buffer->data_size < sizeof(*fp) ||
!IS_ALIGNED(*offp, sizeof(u32))) {
binder_user_error("%d:%d got transaction with invalid offset, %lld\n",
proc->pid, thread->pid, (u64)*offp);
return_error = BR_FAILED_REPLY;
goto err_bad_offset;
}
fp = (struct flat_binder_object *)(t->buffer->data + *offp);
// 这里我们传递的flat_binder_object的类型是BINDER_TYPE_BINDER
switch (fp->type) {
case BINDER_TYPE_BINDER:
case BINDER_TYPE_WEAK_BINDER: {
struct binder_ref *ref;
// fp->binder为binder实体对应的服务组件的弱引用
// 获取binder_node,服务正在注册,这里返回null
struct binder_node *node = binder_get_node(proc, fp->binder);
if (node == NULL) {
// 为服务组件创建binder_node
// fp->cookie为用户态服务组件地址
node = binder_new_node(proc, fp->binder, fp->cookie);
if (node == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_new_node_failed;
}
node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
node->accept_fds = !!(fp->flags & FLAT_BINDER_FLAG_ACCEPTS_FDS);
}
......
// 为binder_node创建对应的binder_ref对象
ref = binder_get_ref_for_node(target_proc, node);
if (ref == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_get_ref_for_node_failed;
}
// 改写flat_binder_object信息
if (fp->type == BINDER_TYPE_BINDER)
fp->type = BINDER_TYPE_HANDLE;
else
fp->type = BINDER_TYPE_WEAK_HANDLE;
fp->binder = 0;
fp->handle = ref->desc;
fp->cookie = 0;
binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE,
&thread->todo);
trace_binder_transaction_node_to_ref(t, node, ref);
binder_debug(BINDER_DEBUG_TRANSACTION,
" node %d u%016llx -> ref %d desc %d\n",
node->debug_id, (u64)node->ptr,
ref->debug_id, ref->desc);
} break;
......
}
}
if (reply) {
BUG_ON(t->buffer->async_transaction != 0);
binder_pop_transaction(target_thread, in_reply_to);
} else if (!(t->flags & TF_ONE_WAY)) {
BUG_ON(t->buffer->async_transaction != 0);
t->need_reply = 1;
// binder_transaction添加到发送方的transaction_stack中
t->from_parent = thread->transaction_stack;
thread->transaction_stack = t;
} else {
BUG_ON(target_node == NULL);
BUG_ON(t->buffer->async_transaction != 1);
if (target_node->has_async_transaction) {
target_list = &target_node->async_todo;
target_wait = NULL;
} else
target_node->has_async_transaction = 1;
}
t->work.type = BINDER_WORK_TRANSACTION;
// 添加到目标进程(线程)的待处理的工作列表
list_add_tail(&t->work.entry, target_list);
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
// 添加到发送方待处理的工作列表
list_add_tail(&tcomplete->entry, &thread->todo);
if (target_wait) {
// 唤醒目标进程(线程)
if (reply || !(t->flags & TF_ONE_WAY))
wake_up_interruptible_sync(target_wait);
else
wake_up_interruptible(target_wait);
}
return;
......
}
下面看ServiceManager处理ADD_SERVICE请求。
ServiceManager处理SVC_MGR_ADD_SERVICE(3)请求
通常ServiceManager的binder线程在binder_thread_read()中进入睡眠等待,下面从binder线程被唤醒后开始分析。
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
......
if (wait_for_proc_work)
// 如果binder线程在等待进程工作,唤醒后调整空闲binder线程计数
proc->ready_threads--;
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
......
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
// 获取待处理的工作项
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread->todo, struct binder_work,
entry);
} else if (!list_empty(&proc->todo) && wait_for_proc_work) {
w = list_first_entry(&proc->todo, struct binder_work,
entry);
} else {
/* no data added */
if (ptr - buffer == 4 &&
!(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN))
goto retry;
break;
}
if (end - ptr < sizeof(tr) + 4)
break;
switch (w->type) {
// 这里工作项的类型为BINDER_WORK_TRANSACTION
case BINDER_WORK_TRANSACTION: {
// 获取binder_transaction
t = container_of(w, struct binder_transaction, work);
} break;
......
}
......
if (t->buffer->target_node) {
// 目标binder实体,这里是binder_context_mgr_node
struct binder_node *target_node = t->buffer->target_node;
// 目标服务的弱引用
tr.target.ptr = target_node->ptr;
// 目标服务的地址
tr.cookie = target_node->cookie;
t->saved_priority = task_nice(current);
if (t->priority < target_node->min_priority &&
!(t->flags & TF_ONE_WAY))
binder_set_nice(t->priority);
else if (!(t->flags & TF_ONE_WAY) ||
t->saved_priority > target_node->min_priority)
binder_set_nice(target_node->min_priority);
cmd = BR_TRANSACTION;
} else {
tr.target.ptr = 0;
tr.cookie = 0;
cmd = BR_REPLY;
}
// code为ADD_SERVICE_TRANSACTION(3)
tr.code = t->code;
tr.flags = t->flags;
tr.sender_euid = from_kuid(current_user_ns(), t->sender_euid);
if (t->from) {
struct task_struct *sender = t->from->proc->tsk;
tr.sender_pid = task_tgid_nr_ns(sender,
task_active_pid_ns(current));
} else {
tr.sender_pid = 0;
}
// 接收的IPC数据的大小
tr.data_size = t->buffer->data_size;
// 接收的binder object的数量
tr.offsets_size = t->buffer->offsets_size;
// 接收的IPC数据用户态地址
tr.data.ptr.buffer = (binder_uintptr_t)(
(uintptr_t)t->buffer->data +
proc->user_buffer_offset);
// 接收的binder object偏移信息用户态地址
tr.data.ptr.offsets = tr.data.ptr.buffer +
ALIGN(t->buffer->data_size,
sizeof(void *));
// BR_TRANSACTION拷贝至用户态read_buffer
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
// binder_transaction_data拷贝至用户态read_buffer
if (copy_to_user(ptr, &tr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
trace_binder_transaction_received(t);
binder_stat_br(proc, thread, cmd);
......
// binder_work从待处理工作项中删除
list_del(&t->work.entry);
t->buffer->allow_user_free = 1;
if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) {
// binder_transaction添加到transaction_stack
t->to_parent = thread->transaction_stack;
t->to_thread = thread;
thread->transaction_stack = t;
} else {
t->buffer->transaction = NULL;
kfree(t);
binder_stats_deleted(BINDER_STAT_TRANSACTION);
}
break;
}
done:
// 记录binder驱动返回的数据大小
*consumed = ptr - buffer;
......
}
接下来返回用户态,下面分析返回用户态后的工作。
void binder_loop(struct binder_state *bs, binder_handler func)
{
int res;
struct binder_write_read bwr;
uint32_t readbuf[32];
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
readbuf[0] = BC_ENTER_LOOPER;
binder_write(bs, readbuf, sizeof(uint32_t));
for (;;) {
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (uintptr_t) readbuf;
// 从此返回用户态
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
......
// 处理客户端的请求
res = binder_parse(bs, 0, (uintptr_t) readbuf, bwr.read_consumed, func);
if (res == 0) {
ALOGE("binder_loop: unexpected reply?!\n");
break;
}
if (res < 0) {
ALOGE("binder_loop: io error %d %s\n", res, strerror(errno));
break;
}
}
}
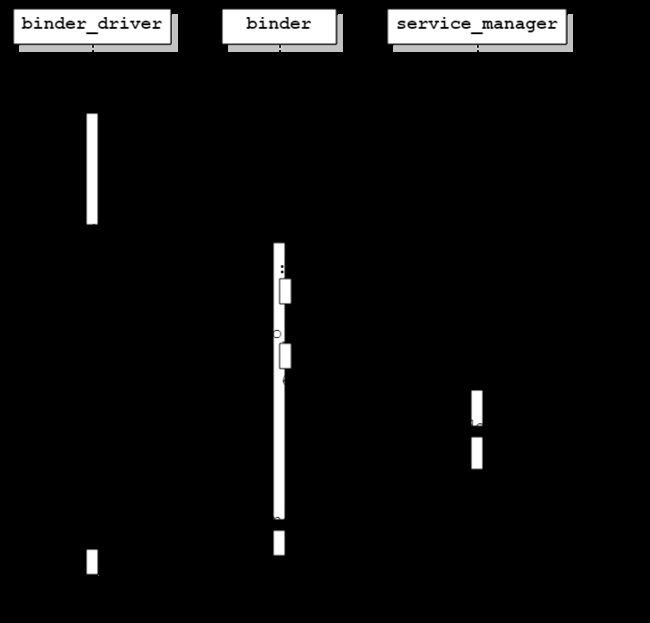
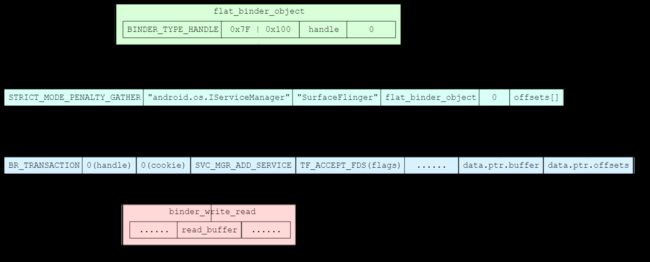
在分析binder_parse()之前,首先看ServiceManager收到的IPC数据的内容,如图所示。
下面继续看binder_parse()的实现
int binder_parse(struct binder_state *bs, struct binder_io *bio,
uintptr_t ptr, size_t size, binder_handler func)
{
int r = 1;
uintptr_t end = ptr + (uintptr_t) size;
while (ptr < end) {
uint32_t cmd = *(uint32_t *) ptr;
ptr += sizeof(uint32_t);
......
// cmd是BR_TRANSACTION(我们忽略BR_NOOP的处理)
switch(cmd) {
......
case BR_TRANSACTION: {
struct binder_transaction_data *txn = (struct binder_transaction_data *) ptr;
if ((end - ptr) < sizeof(*txn)) {
ALOGE("parse: txn too small!\n");
return -1;
}
binder_dump_txn(txn);
// func是svcmgr_handler
if (func) {
unsigned rdata[256/4];
struct binder_io msg;
struct binder_io reply;
int res;
// reply用于记录返回客户端的IPC数据
bio_init(&reply, rdata, sizeof(rdata), 4);
// msg用于记录客户端发送的IPC数据
bio_init_from_txn(&msg, txn);
// 调用svcmgr_handler处理客户端请求
res = func(bs, txn, &msg, &reply);
if (txn->flags & TF_ONE_WAY) {
// ONE_WAY无需回复,释放binder_buffer
binder_free_buffer(bs, txn->data.ptr.buffer);
} else {
// 非ONE_WAY,需要回复
binder_send_reply(bs, &reply, txn->data.ptr.buffer, res);
}
}
ptr += sizeof(*txn);
break;
}
......
}
}
......
}
下面看svcmgr_handler()的实现
int svcmgr_handler(struct binder_state *bs,
struct binder_transaction_data *txn,
struct binder_io *msg,
struct binder_io *reply)
{
struct svcinfo *si;
uint16_t *s;
size_t len;
uint32_t handle;
uint32_t strict_policy;
int allow_isolated;
......
// policy通常为STRICT_NODE_PENALTY_GATHER
strict_policy = bio_get_uint32(msg);
// "android.os.IServiceManager"
s = bio_get_string16(msg, &len);
if (s == NULL) {
return -1;
}
// 检查IServiceManager接口描述符字符串
if ((len != (sizeof(svcmgr_id) / 2)) ||
memcmp(svcmgr_id, s, sizeof(svcmgr_id))) {
fprintf(stderr,"invalid id %s\n", str8(s, len));
return -1;
}
......
switch(txn->code) {
......
case SVC_MGR_ADD_SERVICE:
// 获取要注册的服务名字
s = bio_get_string16(msg, &len);
if (s == NULL) {
return -1;
}
// handle为binder引用描述符(对应于特定服务binder实体)
handle = bio_get_ref(msg);
// 是否允许孤立的进程访问服务
allow_isolated = bio_get_uint32(msg) ? 1 : 0;
// 注册服务
if (do_add_service(bs, s, len, handle, txn->sender_euid,
allow_isolated, txn->sender_pid))
return -1;
break;
......
}
......
}
下面看do_add_service()的实现
int do_add_service(struct binder_state *bs,
const uint16_t *s, size_t len,
uint32_t handle, uid_t uid, int allow_isolated,
pid_t spid)
{
struct svcinfo *si;
......
// 检查是否有权限注册服务
if (!svc_can_register(s, len, spid, uid)) {
ALOGE("add_service('%s',%x) uid=%d - PERMISSION DENIED\n",
str8(s, len), handle, uid);
return -1;
}
// 查询服务是否已经注册(find_svc实现效率可优化)
si = find_svc(s, len);
if (si) {
// 已经注册过,更新handle
if (si->handle) {
ALOGE("add_service('%s',%x) uid=%d - ALREADY REGISTERED, OVERRIDE\n",
str8(s, len), handle, uid);
svcinfo_death(bs, si);
}
si->handle = handle;
} else {
// 为新服务分配svcinfo
si = malloc(sizeof(*si) + (len + 1) * sizeof(uint16_t));
if (!si) {
ALOGE("add_service('%s',%x) uid=%d - OUT OF MEMORY\n",
str8(s, len), handle, uid);
return -1;
}
// 记录服务信息
si->handle = handle;
si->len = len;
memcpy(si->name, s, (len + 1) * sizeof(uint16_t));
si->name[len] = '\0';
si->death.func = (void*) svcinfo_death;
si->death.ptr = si;
si->allow_isolated = allow_isolated;
// 添加到全局服务链表中
si->next = svclist;
svclist = si;
}
// 增加binder引用计数
binder_acquire(bs, handle);
// 注册服务死亡通知
binder_link_to_death(bs, handle, &si->death);
return 0;
}
至此,服务注册的大部分工作已经完成,BC_REPLY以及BR_REPLY的过程相对简单,不再讨论。