undistortPoints()函数用法总结
undistortPoints()函数用法总结
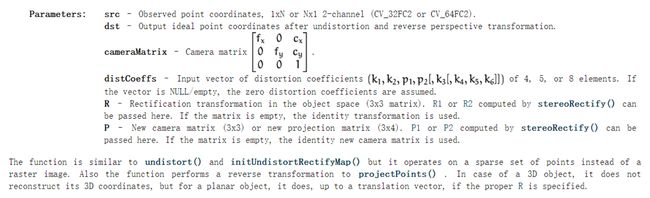
函数调用:C++: void undistortPoints(InputArray src, OutputArray dst, InputArray cameraMatrix, InputArray distCoeffs, InputArrayR=noArray(), InputArray P=noArray())
参数说明:
特别说明:

实现功能:通过旋转平移变换,将观察点转换到理想的点坐标下。
用法举例:
bool CoreAlgorithm::findPntsWithTagVStrong(vector 程序运行结果:
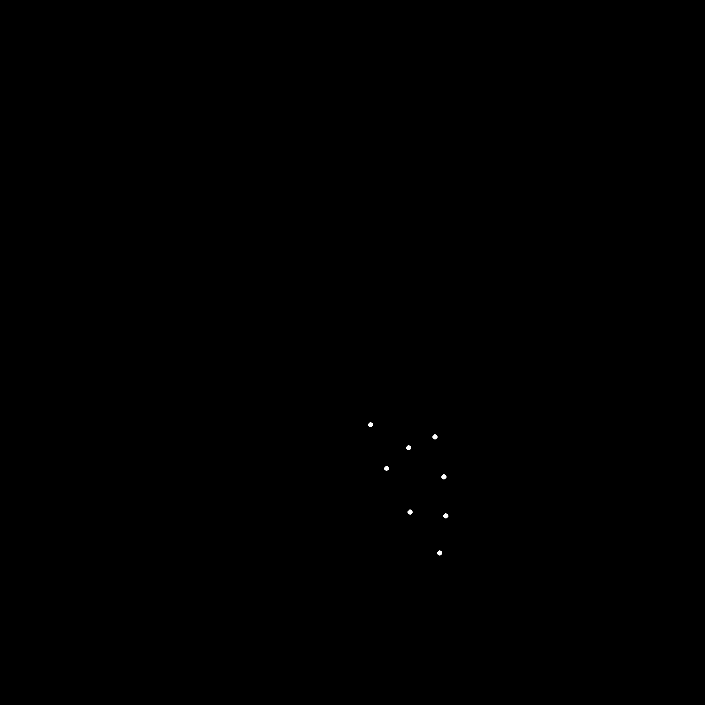
原来的中心点排布如下:
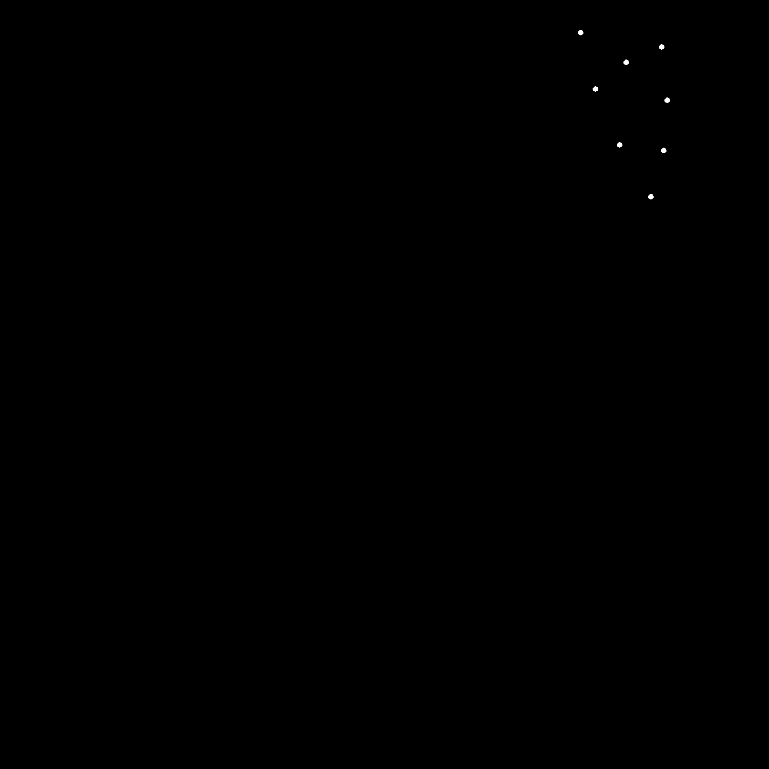
经过undistortPoints()旋转变换后的中心点排布如下:`
注:代码中加粗的部分为常常会犯错误的地方。
个人公众号:
