opencv3/C++霍夫圆/直线检测
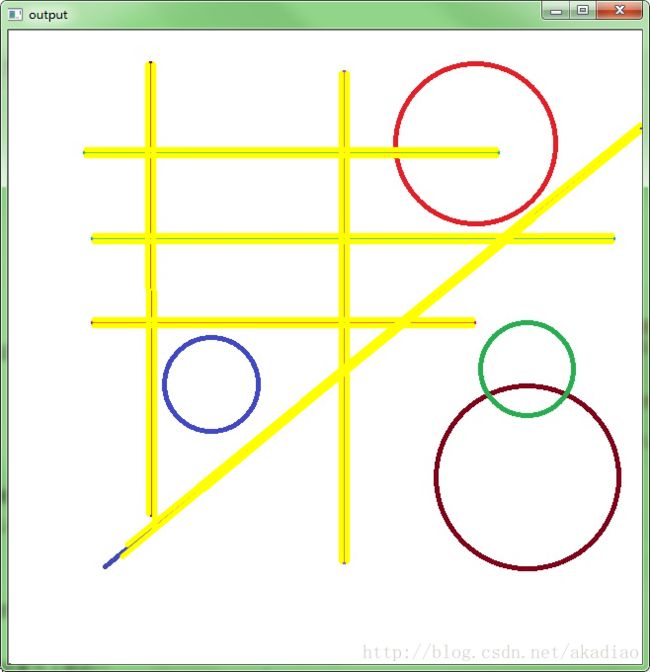
霍夫直线检测
参数说明:
cv::HoughLinesP(
InputArray src, // 输入图像(8位灰度图像)
OutputArray lines, // 输出直线两点坐标(vector)
double rho, // 生成极坐标时候的像素扫描步长
double theta, //生成极坐标时候的角度步长(一般取CV_PI/180)
int threshold, // 累加器阈值,获得足够交点的极坐标点才被看成是直线
double minLineLength=0;// 直线最小长度
double maxLineGap=0;// 直线最大间隔
)示例:
#include
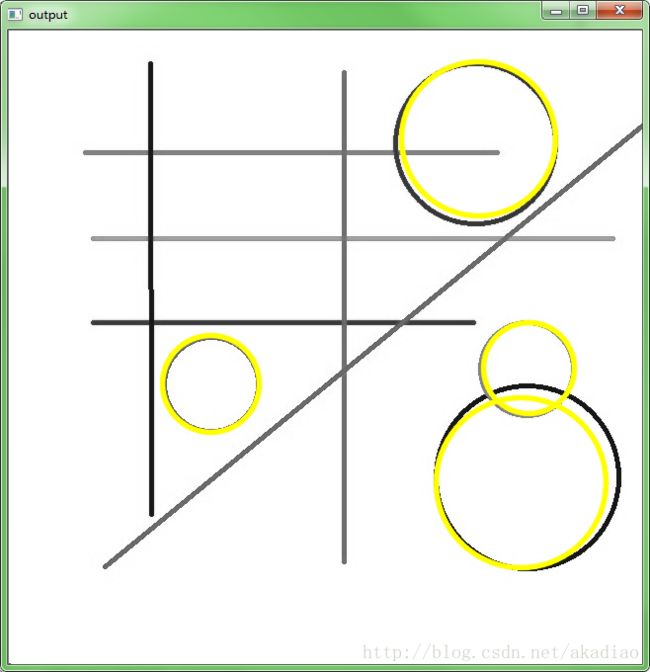
霍夫圆检测
霍夫圆检测对噪声比较敏感,一般要先对图像做中值滤波。
参数说明:
HoughCircles(
InputArray image, // 输入图像 ,必须是8位的单通道灰度图像
OutputArray circles, // 输出结果,即圆信息(圆心+半径)
Int method, // 采用方法:HOUGH_GRADIENT
Double dp, // dp = 1;
Double mindist, // 10 最短距离-可以分辨是两个圆的,否则认为是同心圆:src_gray.rows/8
Double param1, // 用于Canny的边缘阀值上限,下限被置为上限的一半
Double param2, // 中心点累加器阈值
Int minradius, // 最小半径
Int maxradius//最大半径
)
示例:
#include