入门版的车道线检测(python+opencv)
入门版的车道线检测
- 参考资料
参考资料
链接1
链接2
这个代码,我只是仿写。不同的地方在于,能不用函数就不用。应该客观性好点。代码步骤如下。我也学着装B,在GitHub上存了我的完整代码。还有利用这个代码识别自己图片中车道线的实例,还有一点点解析。可以去看看,对了还有代码原图。
链接3
1 加载图片
import cv2 as cv
import numpy as np
#读取图片
src = cv.imread('OpenCV/LaneDetection/lane.jpg')
2 高斯滤波
#高斯降噪
src1 = cv.GaussianBlur(src,(5,5),0,0)
cv.imshow('gaosi',src1)
 3 转灰度图
3 转灰度图
#灰度处理
src2 = cv.cvtColor(src1,cv.COLOR_BGR2GRAY)
cv.imshow('huidu',src2)
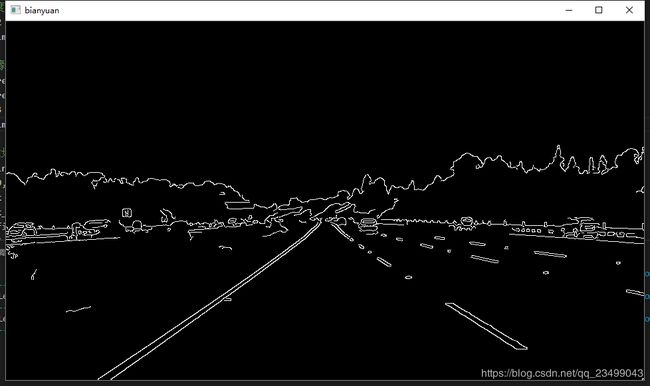
 4 边缘处理
4 边缘处理
#边缘检测
lthrehlod = 50
hthrehlod =150
src3 = cv.Canny(src2,lthrehlod,hthrehlod)
cv.imshow('bianyuan',src3)
 5 ROI区域
5 ROI区域
#ROI划定区间,并将非此区间变成黑色
regin = np.array([[(0,src.shape[0]),(460,325),
(520,325),(src.shape[1],src.shape[0])]]) #为啥要两中括号?
mask = np.zeros_like(src3)
mask_color = 255 #src3图像的通道数是1,且是灰度图像,所以颜色值在0-255
cv.fillPoly(mask,regin,mask_color)
src4 = cv.bitwise_and(src3,mask)
cv.imshow('bianyuan',src4)
 6 区分车道线(这里也可以把线画出来,但是效果不好,有位置比较差的点)
6 区分车道线(这里也可以把线画出来,但是效果不好,有位置比较差的点)
#利用霍夫变换原理找出上图中的像素点组成的直线,然后画出来
rho = 1
theta = np.pi/180
threhold =15
minlength = 40
maxlengthgap = 20
lines = cv.HoughLinesP(src4,rho,theta,threhold,np.array([]),minlength,maxlengthgap)
#画线
linecolor =[0,255,255]
linewidth = 4
src5 = cv.cvtColor(src4,cv.COLOR_GRAY2BGR) #转化为三通道的图像
lefts =[]
rights =[]
for line in lines:
for x1,y1,x2,y2 in line:
#cv.line(src5,(x1,y1),(x2,y2),linecolor,linewidth)
#分左右车道
k = (y2-y1)/(x2-x1)
if k<0:
lefts.append(line)
else:
rights.append(line)
7 接下来有两个函数,过滤点和得出直线方程然后得到直线两端点位置。(这里唯一的难点,过了就这代码就懂了),本来想拆分,但是没有看函数的输入也很难懂,看函数结合输入看吧。
#优化处理
def choose_lines(lines,threhold): #过滤斜率差别较大的点
slope =[(y2-y1)/(x2-x1) for line in lines for x1,x2,y1,y2 in line]
while len(lines) >0:
mean = np.mean(slope) #平均斜率
diff = [abs(s- mean) for s in slope]
idx = np.argmax(diff)
if diff[idx] > threhold:
slope.pop(idx)
lines.pop(idx)
else:
break
return lines
def clac_edgepoints(points,ymin,ymax): #可以理解成找一条线的端点
x = [p[0] for p in points ]
y = [p[1] for p in points ]
k = np.polyfit(y,x,1)
func = np.poly1d(k) #方程是y关于x的函数,因为输入的ymin ymax。要求xmin,xmax
xmin = int(func(ymin))
xmax= int(func(ymax))
return[(xmin,ymin),(xmax,ymax)]
good_leftlines = choose_lines(lefts,0.1) #处理后的点
good_rightlines = choose_lines(rights,0.1)
leftpoints = [(x1,y1) for left in good_leftlines for x1,y1,x2,y2 in left]
leftpoints = leftpoints+[(x2,y2) for left in good_leftlines for x1,y1,x2,y2 in left]
rightpoints = [(x1,y1) for right in good_rightlines for x1,y1,x2,y2 in right]
rightpoints = rightpoints+[(x2,y2) for right in good_rightlines for x1,y1,x2,y2 in right]
lefttop = clac_edgepoints(leftpoints,325,src.shape[0]) # 要画左右车道线的端点
righttop = clac_edgepoints(rightpoints,325,src.shape[0])
src6 = np.zeros_like(src5)
cv.line(src6,lefttop[0],lefttop[1],linecolor,linewidth)
cv.line(src6,righttop[0],righttop[1],linecolor,linewidth)
#cv.imshow('onlylane',src6)
 8 合成
8 合成
#图像叠加
src7 = cv.addWeighted(src1,0.8,src6,1,0)
cv.imshow('Finally Image',src7)

记得代码后面加这几句啊
cv.waitKey(0)
cv.destroyAllWindows()