Tensorflow2.0 之 SSD 网络结构
文章目录
- 引言
- 网络结构
- 搭建 SSD 网络
- 空洞卷积
- 参考资料
引言
SSD 目标检测算法在 2016 年被提出,它的速度要快于 Faster-RCNN,其精度要高于 YOLO(YOLOv3 除外),在本文中,我们主要针对其网络结构进行说明。
网络结构
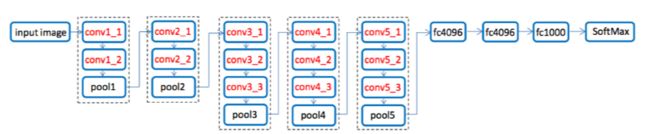
其实 SSD 的网络是基于 VGG 网络来建立的,VGG 网络如下图所示:
 SSD 网络将 VGG 中的全连接层去掉后又在后面接了十层卷积层,将 VGG 中的 Conv4_3,新加的 Conv7,Conv8_2,Conv9_2,Conv10_2,Conv11_2 的结果输出,达到多尺度输出(类似于金字塔)的效果,如下图所示:
SSD 网络将 VGG 中的全连接层去掉后又在后面接了十层卷积层,将 VGG 中的 Conv4_3,新加的 Conv7,Conv8_2,Conv9_2,Conv10_2,Conv11_2 的结果输出,达到多尺度输出(类似于金字塔)的效果,如下图所示:
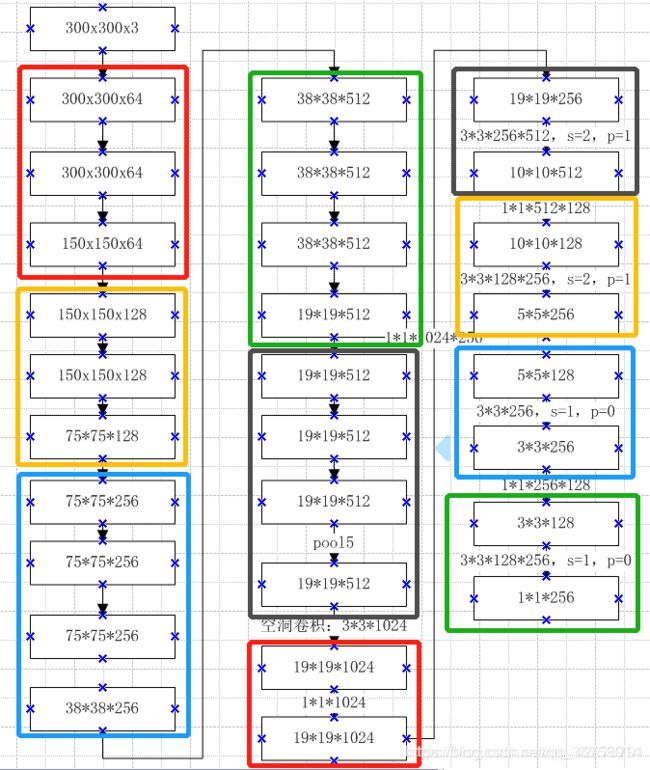
 将一张 300x300x3 的图片输入网络,其经历的变换如图所示:
将一张 300x300x3 的图片输入网络,其经历的变换如图所示:
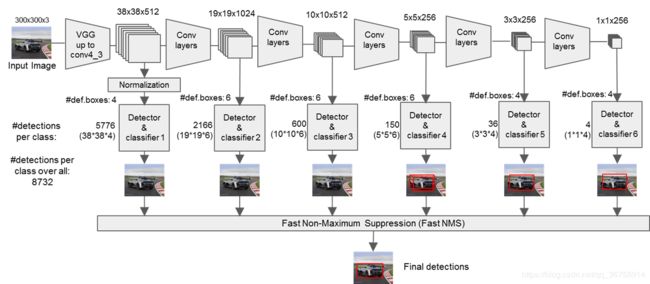 我们在不同的特征图上画固定比例的框,大分辨率上的框对检测小目标有帮助,小分辨率上的框对检测大目标有帮助。所以可以得到多个尺度的预测值。
我们在不同的特征图上画固定比例的框,大分辨率上的框对检测小目标有帮助,小分辨率上的框对检测大目标有帮助。所以可以得到多个尺度的预测值。
搭建 SSD 网络
import tensorflow as tf
class SSD(tf.keras.Model):
def __init__(self, num_class=21):
super(SSD, self).__init__()
# conv1
self.conv1_1 = tf.keras.layers.Conv2D(64, 3, activation='relu', padding='same')
self.conv1_2 = tf.keras.layers.Conv2D(64, 3, activation='relu', padding='same')
self.pool1 = tf.keras.layers.MaxPooling2D(2, strides=2, padding='same')
# conv2
self.conv2_1 = tf.keras.layers.Conv2D(128, 3, activation='relu', padding='same')
self.conv2_2 = tf.keras.layers.Conv2D(128, 3, activation='relu', padding='same')
self.pool2 = tf.keras.layers.MaxPooling2D(2, strides=2, padding='same')
# conv3
self.conv3_1 = tf.keras.layers.Conv2D(256, 3, activation='relu', padding='same')
self.conv3_2 = tf.keras.layers.Conv2D(256, 3, activation='relu', padding='same')
self.conv3_3 = tf.keras.layers.Conv2D(256, 3, activation='relu', padding='same')
self.pool3 = tf.keras.layers.MaxPooling2D(2, strides=2, padding='same')
# conv4
self.conv4_1 = tf.keras.layers.Conv2D(512, 3, activation='relu', padding='same')
self.conv4_2 = tf.keras.layers.Conv2D(512, 3, activation='relu', padding='same')
self.conv4_3 = tf.keras.layers.Conv2D(512, 3, activation='relu', padding='same')
self.pool4 = tf.keras.layers.MaxPooling2D(2, strides=2, padding='same')
# conv5
self.conv5_1 = tf.keras.layers.Conv2D(512, 3, activation='relu', padding='same')
self.conv5_2 = tf.keras.layers.Conv2D(512, 3, activation='relu', padding='same')
self.conv5_3 = tf.keras.layers.Conv2D(512, 3, activation='relu', padding='same')
self.pool5 = tf.keras.layers.MaxPooling2D(3, strides=1, padding='same')
# fc6, => vgg backbone is finished. now they are all SSD blocks
self.fc6 = tf.keras.layers.Conv2D(1024, 3, dilation_rate=6, activation='relu', padding='same')
# fc7
self.fc7 = tf.keras.layers.Conv2D(1024, 1, activation='relu', padding='same')
# Block 8/9/10/11: 1x1 and 3x3 convolutions strides 2 (except lasts)
# conv8
self.conv8_1 = tf.keras.layers.Conv2D(256, 1, activation='relu', padding='same')
self.conv8_2 = tf.keras.layers.Conv2D(512, 3, strides=2, activation='relu', padding='same')
# conv9
self.conv9_1 = tf.keras.layers.Conv2D(128, 1, activation='relu', padding='same')
self.conv9_2 = tf.keras.layers.Conv2D(256, 3, strides=2, activation='relu', padding='same')
# conv10
self.conv10_1 = tf.keras.layers.Conv2D(128, 1, activation='relu', padding='same')
self.conv10_2 = tf.keras.layers.Conv2D(256, 3, activation='relu', padding='valid')
# conv11
self.conv11_1 = tf.keras.layers.Conv2D(128, 1, activation='relu', padding='same')
self.conv11_2 = tf.keras.layers.Conv2D(256, 3, activation='relu', padding='valid')
def call(self, x, training=False):
h = self.conv1_1(x)
h = self.conv1_2(h)
h = self.pool1(h)
h = self.conv2_1(h)
h = self.conv2_2(h)
h = self.pool2(h)
h = self.conv3_1(h)
h = self.conv3_2(h)
h = self.conv3_3(h)
h = self.pool3(h)
h = self.conv4_1(h)
h = self.conv4_2(h)
h = self.conv4_3(h)
print(h.shape)
h = self.pool4(h)
h = self.conv5_1(h)
h = self.conv5_2(h)
h = self.conv5_3(h)
h = self.pool5(h)
h = self.fc6(h) # [1,19,19,1024]
h = self.fc7(h) # [1,19,19,1024]
print(h.shape)
h = self.conv8_1(h)
h = self.conv8_2(h) # [1,10,10, 512]
print(h.shape)
h = self.conv9_1(h)
h = self.conv9_2(h) # [1, 5, 5, 256]
print(h.shape)
h = self.conv10_1(h)
h = self.conv10_2(h) # [1, 3, 3, 256]
print(h.shape)
h = self.conv11_1(h)
h = self.conv11_2(h) # [1, 1, 1, 256]
print(h.shape)
return h
当我们将一张 300x300x3 的图片输入,得到的结果为:
model = SSD(21)
x = model(tf.ones(shape=[1,300,300,3]))
(1, 38, 38, 512)
(1, 19, 19, 1024)
(1, 10, 10, 512)
(1, 5, 5, 256)
(1, 3, 3, 256)
(1, 1, 1, 256)
空洞卷积
在以上代码中构建 self.fc6 这层卷积层时,我们使用了空洞卷积(dilated convolution),这引入了一个新的参数,即扩张率(dilation rate),其原理如图所示:
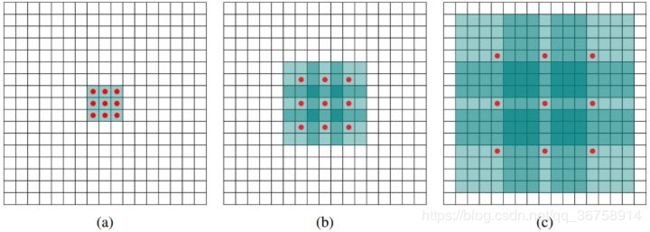 a 图对应扩张率为 1 时的 3x3 卷积核,其实就和普通的卷积操作一样,b 图对应扩张率为 2 时的 3x3 卷积核,也就是对于图像中一个 7x7 的区域,只有 9 个红色的点和 3x3 的卷积核发生卷积操作,其余的点略过。也可以理解为卷积核大小为 7x7,但是只有图中的 9 个点的权重不为 0,其余都为 0。 可以看到虽然卷积核大小只有 3x3,但是这个卷积的感受野已经增大到了 7x7,c 图对应扩张率为 4 时的 3x3 卷积核,能达到15x15的感受野。对比传统的conv操作,3层3x3的卷积加起来,stride为1的话,只能达到 (kernel-1)xlayer+1=7 的感受野,也就是和层数成线性关系,而空洞卷积的感受野是指数级的增长。
a 图对应扩张率为 1 时的 3x3 卷积核,其实就和普通的卷积操作一样,b 图对应扩张率为 2 时的 3x3 卷积核,也就是对于图像中一个 7x7 的区域,只有 9 个红色的点和 3x3 的卷积核发生卷积操作,其余的点略过。也可以理解为卷积核大小为 7x7,但是只有图中的 9 个点的权重不为 0,其余都为 0。 可以看到虽然卷积核大小只有 3x3,但是这个卷积的感受野已经增大到了 7x7,c 图对应扩张率为 4 时的 3x3 卷积核,能达到15x15的感受野。对比传统的conv操作,3层3x3的卷积加起来,stride为1的话,只能达到 (kernel-1)xlayer+1=7 的感受野,也就是和层数成线性关系,而空洞卷积的感受野是指数级的增长。
参考资料
目标检测之经典网络SSD解读
彻底搞懂SSD网络结构