人脸姿态估计(计算欧拉角)
1.什么是人脸姿态估计问题
人脸姿态估计主要是获得脸部朝向的角度信息。一般可以用旋转矩阵、旋转向量、四元数或欧拉角表示(这四个量也可以互相转换)。一般而言,欧拉角可读性更好一些,使用更为广泛。本文获得的人脸姿态信息用三个欧拉角(pitch,yaw,roll)表示。
欧拉角动图注解
pitch:俯仰角,表示物体绕x轴旋转
yaw:偏航角,表示物体绕y轴旋转
roll:翻滚角,表示物体绕z轴旋转
2.计算步骤
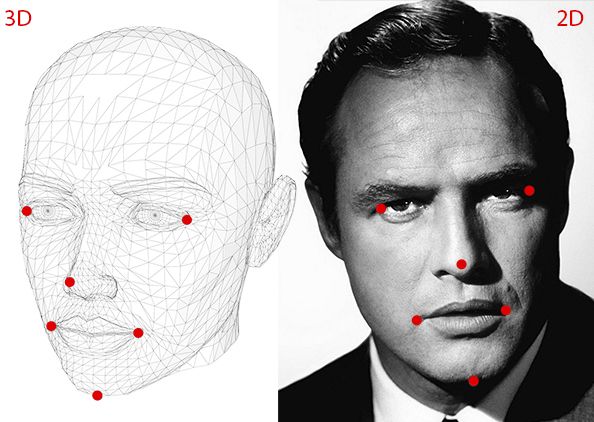
1)首先定义一个具有n个关键点的3D脸部模型,n可以根据自己对准确度的容忍程度进行定义,以下示例定义6个关键点的3D脸部模型(左眼角,右眼角,鼻尖,左嘴角,右嘴角,下颌);
2)采用人脸检测以及面部关键点检测得到上述3D脸部对应的2D人脸关键点;
3)采用Opencv的solvePnP函数解出旋转向量;
4)将旋转向量转换为欧拉角;
3.定义6关键点的3D Model
C++
// 3D model points.
std::vector model_points;
model_points.push_back(cv::Point3d(0.0f, 0.0f, 0.0f)); // Nose tip
model_points.push_back(cv::Point3d(0.0f, -330.0f, -65.0f)); // Chin
model_points.push_back(cv::Point3d(-225.0f, 170.0f, -135.0f)); // Left eye left corner
model_points.push_back(cv::Point3d(225.0f, 170.0f, -135.0f)); // Right eye right corner
model_points.push_back(cv::Point3d(-150.0f, -150.0f, -125.0f)); // Left Mouth corner
model_points.push_back(cv::Point3d(150.0f, -150.0f, -125.0f)); // Right mouth corner
python
# 3D model points.
model_points = np.array([
(0.0, 0.0, 0.0), # Nose tip
(0.0, -330.0, -65.0), # Chin
(-225.0, 170.0, -135.0), # Left eye left corner
(225.0, 170.0, -135.0), # Right eye right corne
(-150.0, -150.0, -125.0), # Left Mouth corner
(150.0, -150.0, -125.0) # Right mouth corner
]) 68点的3D model下载链接:链接:https://pan.baidu.com/s/162szx0PWl6dvnEHbDTDPAw 密码:ip7v
4.关键点检测
利用相关算法进行人脸关键点检测,一般常见68个关键点检测模型,其具体顺序如下所示,而6个关键点对应的索引id分别为:
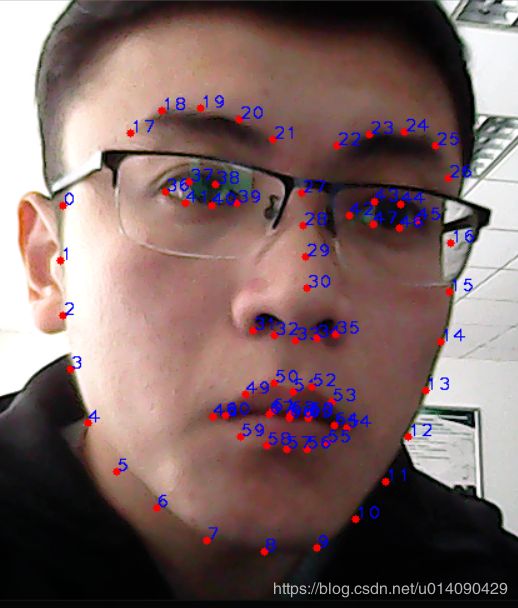
下巴:8
鼻尖:30
左眼角:36
右眼角:45
左嘴角:48
右嘴角:54
C++
// 2D image points. If you change the image, you need to change vector
std::vector image_points;
image_points.push_back( cv::Point2d(359, 391) ); // Nose tip
image_points.push_back( cv::Point2d(399, 561) ); // Chin
image_points.push_back( cv::Point2d(337, 297) ); // Left eye left corner
image_points.push_back( cv::Point2d(513, 301) ); // Right eye right corner
image_points.push_back( cv::Point2d(345, 465) ); // Left Mouth corner
image_points.push_back( cv::Point2d(453, 469) ); // Right mouth corner
python
#2D image points. If you change the image, you need to change vector
image_points = np.array([
(359, 391), # Nose tip
(399, 561), # Chin
(337, 297), # Left eye left corner
(513, 301), # Right eye right corne
(345, 465), # Left Mouth corner
(453, 469) # Right mouth corner
], dtype="double") 5.用Opencv的solvePnP函数解出旋转向量
OpenCV中solvePnP 和 solvePnPRansac都可以用来估计Pose。第二个solvePnPRansac利用随机抽样一致算法(Random sample consensus,RANSAC)的思想,虽然计算出的姿态更加精确,但速度慢、没法实现实时系统,所以我们这里只关注第一个solvePnP函数,具体的参数可以参见Opencv文档。
solvePnP implements several algorithms for pose estimation which can be selected using the parameter
flag. By default it uses the flag SOLVEPNP_ITERATIVE which is essentially the DLT solution followed by
Levenberg-Marquardt optimization. SOLVEPNP_P3P uses only 3 points for calculating the pose and it
should be used only when using solvePnPRansac.
C++: bool solvePnP(InputArray objectPoints, InputArray imagePoints, InputArray cameraMatrix, InputArray
distCoeffs, OutputArray rvec, OutputArray tvec, bool useExtrinsicGuess=false, int
flags=SOLVEPNP_ITERATIVE )
确定pose也就是确定从3D model到图片中人脸的仿射变换矩阵,它包含旋转和平移的信息。solvePnP函数输出结果包括旋转向量(roatation vector)和平移向量(translation vector)。这里我们只关心旋转信息,所以主要将对 roatation vector进行操作。
在调用solvePnP函数前需要初始化cameraMatrix,也就是相机内参,并调用solvePnP函数:
c++
// Camera internals
double focal_length = im.cols; // Approximate focal length.
cv::Point2d center = cv::Point2d(im.cols / 2, im.rows / 2);
cv::Mat camera_matrix = (cv::Mat_(3, 3) << focal_length, 0, center.x, 0, focal_length, center.y, 0, 0, 1);
cv::Mat dist_coeffs = cv::Mat::zeros(4, 1, cv::DataType::type); // Assuming no lens distortion
cv::Mat rotation_vector; // Rotation in axis-angle form
cv::Mat translation_vector;
// Solve for pose
cv::solvePnP(model_points, landmarks, camera_matrix, dist_coeffs, rotation_vector, translation_vector);
python
# Camera internals
focal_length = size[1]
center = (size[1]/2, size[0]/2)
camera_matrix = np.array(
[[focal_length, 0, center[0]],
[0, focal_length, center[1]],
[0, 0, 1]], dtype = "double"
)
print "Camera Matrix :\n {0}".format(camera_matrix)
dist_coeffs = np.zeros((4,1)) # Assuming no lens distortion
(success, rotation_vector, translation_vector) = cv2.solvePnP(model_points, image_points, camera_matrix, dist_coeffs, flags=cv2.CV_ITERATIVE)
print "Rotation Vector:\n {0}".format(rotation_vector)
print "Translation Vector:\n {0}".format(translation_vector)
6.将旋转向量转换为欧拉角
1)旋转向量—>旋转矩阵—>欧拉角
旋转向量转旋转矩阵
theta = np.linalg.norm(rvec)
r = rvec / theta
R_ = np.array([[0, -r[2][0], r[1][0]],
[r[2][0], 0, -r[0][0]],
[-r[1][0], r[0][0], 0]])
R = np.cos(theta) * np.eye(3) + (1 - np.cos(theta)) * r * r.T + np.sin(theta) * R_
print('旋转矩阵')
print(R)
旋转矩阵转欧拉角
def isRotationMatrix(R):
Rt = np.transpose(R) #旋转矩阵R的转置
shouldBeIdentity = np.dot(Rt, R) #R的转置矩阵乘以R
I = np.identity(3, dtype=R.dtype) # 3阶单位矩阵
n = np.linalg.norm(I - shouldBeIdentity) #np.linalg.norm默认求二范数
return n < 1e-6 # 目的是判断矩阵R是否正交矩阵(旋转矩阵按道理须为正交矩阵,如此其返回值理论为0)
def rotationMatrixToAngles(R):
assert (isRotationMatrix(R)) #判断是否是旋转矩阵(用到正交矩阵特性)
sy = math.sqrt(R[0, 0] * R[0, 0] + R[1, 0] * R[1, 0]) #矩阵元素下标都从0开始(对应公式中是sqrt(r11*r11+r21*r21)),sy=sqrt(cosβ*cosβ)
singular = sy < 1e-6 # 判断β是否为正负90°
if not singular: #β不是正负90°
x = math.atan2(R[2, 1], R[2, 2])
y = math.atan2(-R[2, 0], sy)
z = math.atan2(R[1, 0], R[0, 0])
else: #β是正负90°
x = math.atan2(-R[1, 2], R[1, 1])
y = math.atan2(-R[2, 0], sy) #当z=0时,此公式也OK,上面图片中的公式也是OK的
z = 0
x = x*180.0/3.141592653589793
y = y*180.0/3.141592653589793
z = z*180.0/3.141592653589793
return np.array([x, y, z])
2)旋转向量—>四元数—>欧拉角
# 从旋转向量转换为欧拉角
def get_euler_angle(rotation_vector):
# calculate rotation angles
theta = cv2.norm(rotation_vector, cv2.NORM_L2)
# transformed to quaterniond
w = math.cos(theta / 2)
x = math.sin(theta / 2)*rotation_vector[0][0] / theta
y = math.sin(theta / 2)*rotation_vector[1][0] / theta
z = math.sin(theta / 2)*rotation_vector[2][0] / theta
ysqr = y * y
# pitch (x-axis rotation)
t0 = 2.0 * (w * x + y * z)
t1 = 1.0 - 2.0 * (x * x + ysqr)
print('t0:{}, t1:{}'.format(t0, t1))
pitch = math.atan2(t0, t1)
# yaw (y-axis rotation)
t2 = 2.0 * (w * y - z * x)
if t2 > 1.0:
t2 = 1.0
if t2 < -1.0:
t2 = -1.0
yaw = math.asin(t2)
# roll (z-axis rotation)
t3 = 2.0 * (w * z + x * y)
t4 = 1.0 - 2.0 * (ysqr + z * z)
roll = math.atan2(t3, t4)
print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))
# 单位转换:将弧度转换为度
Y = int((pitch/math.pi)*180)
X = int((yaw/math.pi)*180)
Z = int((roll/math.pi)*180)
return 0, Y, X, Z
PS:
人脸旋转的极限角度:
Pitch -60.4~69.6
Yaw -79.8~75.3
Roll -40.9~63.3误差范围:
Pitch: 5.10
Yaw: 4.20
Roll: 2.40参考博客链接:https://blog.csdn.net/c20081052/article/details/89479970
https://github.com/yuenshome/yuenshome.github.io/issues/9
https://www.learnopencv.com/head-pose-estimation-using-opencv-and-dlib/
https://blog.csdn.net/u013512448/article/details/77804161
https://www.jianshu.com/p/5e130c04a602
参考github链接:https://github.com/guozhongluo/head-pose-estimation-and-face-landmark
https://github.com/yinguobing/head-pose-estimation
https://github.com/lsy17096535/face-landmark
比较有用的github链接:https://github.com/TadasBaltrusaitis/OpenFace
https://github.com/genshengye/IntraFace