- 系统学习Python——并发模型和异步编程:进程、线程和GIL
分类目录:《系统学习Python》总目录在文章《并发模型和异步编程:基础知识》我们简单介绍了Python中的进程、线程和协程。本文就着重介绍Python中的进程、线程和GIL的关系。Python解释器的每个实例都是一个进程。使用multiprocessing或concurrent.futures库可以启动额外的Python进程。Python的subprocess库用于启动运行外部程序(不管使用何种
- C++设计模式:简单工厂、工厂方法、抽象工厂
起个别名
C++算法c++
1.工厂模式的特点在我们现实生活中,买馒头和自己蒸馒头、去饭店点一份大盘鸡和自己养鸡,杀鸡,做大盘鸡,这是全然不同的两种体验:自己做麻烦,而且有失败的风险,需要自己承担后果。买现成的,可以忽略制作细节,方便快捷并且无风险,得到的肯定是美味的食物。对于后者,就相当于是一个加工厂,通过这个工厂我们就可以得到想要的东西,在程序设计中,这种模式就叫做工厂模式,工厂生成出的产品就是某个类的实例,也就是对象。
- Python中的静态方法和类方法详解
在Python中,`@staticmethod`和`@classmethod`是两种装饰器,它们用于定义类中的方法,但是它们的行为和用途有所不同。###@staticmethod`@staticmethod`装饰器用于定义一个静态方法。静态方法不接收类或实例的引用作为第一个参数,因此它不能访问类的状态或实例的状态。静态方法可以看作是与类关联的普通函数,但它们可以通过类名直接调用。classMath
- Python中类静态方法:@classmethod/@staticmethod详解和实战示例
在Python中,类方法(@classmethod)和静态方法(@staticmethod)是类作用域下的两种特殊方法。它们使用装饰器定义,并且与实例方法(deffunc(self))的行为有所不同。1.三种方法的对比概览方法类型是否访问实例(self)是否访问类(cls)典型用途实例方法✅是❌否访问对象属性类方法@classmethod❌否✅是创建类的替代构造器,访问类变量等静态方法@stati
- javascript高级程序设计第3版——第12章 DOM2与DOM3
weixin_30687587
javascript数据结构与算法ViewUI
12章——DOM2与DOM3为了增强D0M1,DOM级规范定义了一些模块。DOM2核心:为不同的DOM类型引入了一些与XML命名空间有关的方法,还定义了以编程方式创建Document实例的方法;DOM2级样式:针对操作元素的样式而开发;其特性总结:1.每个元素都有一个关联的style对象,可用来确定和修改行内样式;2.要确定某个元素的计算样式,可使用getComgetComputedStyle()
- JavaScript 基础09:Web APIs——日期对象、DOM节点
梦想当全栈
JavaScriptjavascript前端开发语言
JavaScript基础09:WebAPIs——日期对象、DOM节点进一步学习DOM相关知识,实现可交互的网页特效能够插入、删除和替换元素节点。能够依据元素节点关系查找节点。一、日期对象掌握Date日期对象的使用,动态获取当前计算机的时间。ECMAScript中内置了获取系统时间的对象Date,使用Date时与之前学习的内置对象console和Math不同,它需要借助new关键字才能使用。1.实例
- Javaweb学习之Vue模板语法(三)
不要数手指啦
vue.js学习前端
目录学习资料前情回顾本期介绍(vue模板语法)文本插值Vue的Attribute绑定使用JavaScript表达式综合实例代码:学习资料Vue.js-渐进式JavaScript框架|Vue.js(vuejs.org)前情回顾项目的创建大家可以看这篇文章Vue学习之项目的创建-CSDN博客本期介绍(vue模板语法)首先,找到我们编写代码的地方找到自己项目的src文件夹,打开之后点击component
- FPGA 设计中的 “Create HDL Wrapper“ 和 “Generating Output Products“ 的区别
行者..................
fpga开发
CreateHDLWrapper(创建HDL包装器)目的:为顶层设计模块(通常是BlockDesign/IPIntegrator设计)创建一个HDL包装文件功能:将图形化/框图设计的BlockDesign转换为可综合的HDL代码(Verilog或VHDL)创建一个顶层模块,将所有IP核和连接实例化使用场景:当使用IPIntegrator创建BlockDesign后需要将图形化设计转换为HDL代码以
- 深入解析 “void(0);” 的用法与作用_void(0);
关键要点void(0);是JavaScript中的一个表达式,研究表明它通常用于超链接中,防止页面跳转。它通过void运算符计算表达式并返回undefined,常用于创建“死链接”。证据显示,这种用法简单易用,但现代开发更推荐使用事件监听器。基本概念void(0);的作用void(0);是JavaScript的void运算符的一个实例,void运算符会计算一个表达式但不返回任何值,而是始终返回un
- php中调用对象的方法可以使用array($object, ‘methodName‘)?
IT 老王
phpandroid开发语言
是的,在PHP中,array($object,'methodName')是一种标准的回调语法,用于表示“调用某个对象的特定方法”。这种语法可以被许多函数(如call_user_func()、call_user_func_array()、usort()等)识别并执行。语法原理在PHP中,可调用对象(callable)有多种形式,其中之一是[对象实例,方法名]数组:第一个元素:对象实例(必须是已实例化
- 【收藏系列】Python 常用装饰器全解析
Gaffey大杂烩
pythonpython装饰器
Python常用装饰器全解析装饰器是Python中一个强大的特性,它允许我们在不修改原函数或类的情况下,扩展或修改其功能。本文将详细介绍几个最常用的内置装饰器。Python装饰器速查表(一句话用途)装饰器一句话作用概述@classmethod定义一个类方法,第一个参数是类本身(cls),常用于工厂函数或操作类属性。@staticmethod定义一个不依赖实例或类的工具方法,无需self或cls参数
- GMSK调制解调算法的仿真与研究(源码+万字报告+讲解)
炳烛之明科技
算法
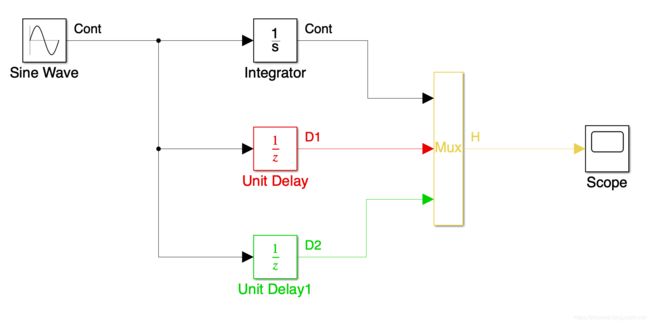
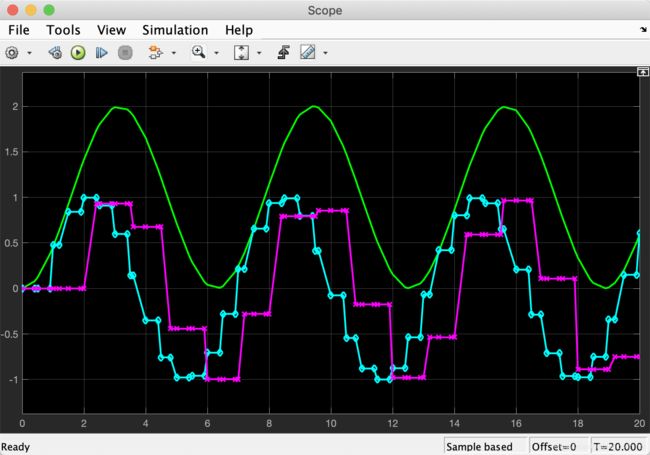
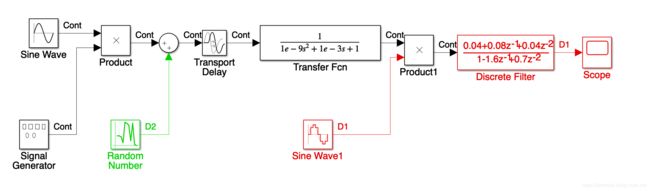
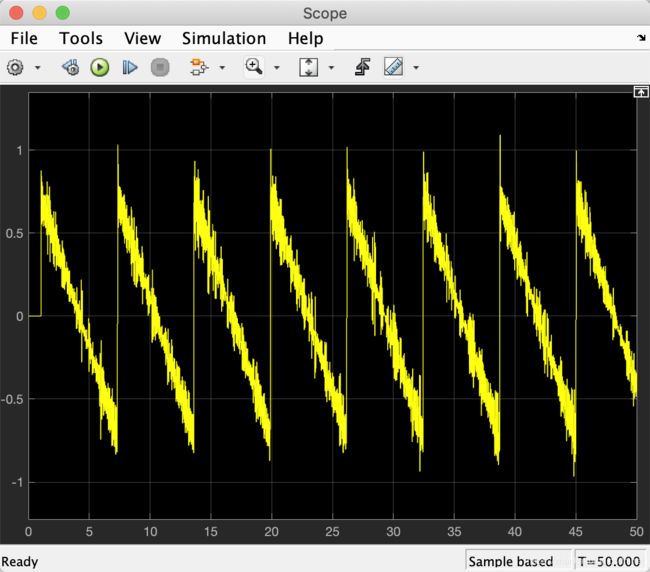
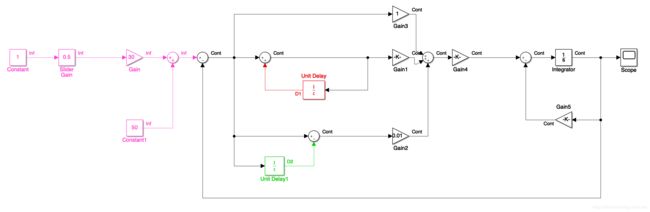
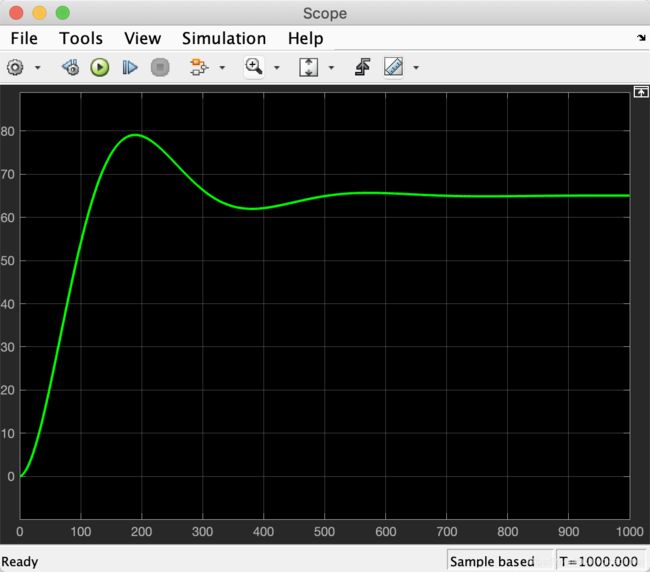
目录GMSK调制解调算法的仿真与研究1摘要1Abstract11绪论51.1研究背景及意义51.2国内外研究现状61.3研究内容102几种数字调制方式112.1GMSK调制112.1.1GMSK简介112.1.2GMSK调制原理122.2QPSK调制152.3二进制相移键控(BPSK)163GMSK调制与解调方案与研究173.1GMSK传统调制方法173.1.1直接产生GMSK信号173.1.2P
- 微软语音合成标记语言SSML文档结构和事件(详细文档和实例)
阿酷tony
AI数字人微信语音合成microsoft微软语音SSML文档结构SSML结构SSML语音合成
说明:MicrosoftAzure中国技术文档网站,请访问https://docs.azure.cn包含输入文本的语音合成标记语言(SSML)确定了文本转语音输出的结构、内容和其他特征。例如,可以使用SSML来定义段落、句子、中断/暂停或静音。可以使用事件标记(例如书签或视素)来包装文本,这些标记可以稍后由应用程序处理。有关如何在SSML文档中构建元素的详细信息,请参阅以下部分。备注某些语音不支持
- uniapp 如何封装实现任意页面都能使用的全局弹窗
代码简单说
2025开发必备(限时特惠)uni-appvue.jsjavascriptuniapp全局弹窗uniapp弹窗组件
【实战干货】uniapp如何封装实现任意页面都能使用的全局弹窗标签:uniapp弹窗组件全局弹窗Vue动态渲染跨页面弹窗✨前端老司机亲授,uniapp无法在所有页面中直接用自定义弹窗?别急,一招动态挂载vue实例,优雅解决!背景故事:一个被“弹窗”搞崩溃的早晨作为一名前端开发工程师,有一天我在给uniapp项目加IM消息功能,需求是:不论当前用户在哪个页面,只要有消息来,就要立即弹出提示窗口。听起
- 【C#】依赖注入知识点汇总
Mike_Wuzy
c#
在C#中实现依赖注入(DependencyInjection,DI)可以帮助你创建更解耦、可维护和易于测试的软件系统。以下是一些关于依赖注入的关键知识点及其示例代码。1.基本概念容器(Container)容器负责管理对象实例以及它们之间的依赖关系。IoC容器(InversionofControlContainer)是实现依赖注入的核心工具,常见的DI框架包括Unity、Autofac、Castle
- 如何从性能菜鸟变性能大咖之------jvm 内存
颜挺锐
jvm性能测试压力测试性能优化
理解JVM(Java虚拟机)内存的性能优化,需要从JVM内存模型、垃圾回收机制、以及如何通过参数调优来提高应用程序的性能等方面入手。以下是对JVM内存性能优化的详细解读:一、JVM内存模型JVM内存模型主要包括以下几个区域:堆内存(Heap):堆内存是JVM管理的最大一块内存空间,用于存放对象实例和数组。堆内存分为年轻代(YoungGeneration)和老年代(OldGeneration)。年轻
- 跨服务sqlplus连接oracle数据库
胡斌附体
数据库oracle19c11gsqlplus问题排查远端连接
背景:ogg程序同步数据。目标库:客户oracle数据库11.0.2.4.0,也就是11g的数据库。源库:业务组搭建的19c数据库,刚安装的oracle数据库。ogg在源库和目标库系统都部署好了并且也可以通信。在目标库系统使用sqlplus测试连接源库的数据库ogg用户。问题。连接出现问题。目前问题得到了解决。是因为访问不能够使用实例名去连接。而需要通过服务名连接。像下面这样是正确的。sqlplu
- UnrealEngine5游戏引擎实践(C++)
KENYCHEN奉孝
C++服务器c++游戏引擎
目录目录目录UnrealEngine是什么?UnrealEngine5简介核心技术特性应用场景扩展兼容性与生态系统UnrealEngine安装下载EpicGamesLauncher启动UnrealEngine选择安装版本和路径选择组件开始安装验证安装配置项目模板(可选)更新和插件管理UE游戏引擎动作捕捉与动画系统程序化生成与AI技术物理与破坏系统音频与本地化技术性能优化导入静态网格体材质实例创建与
- 20250707-3-Kubernetes 核心概念-有了Docker,为什么还用K8s_笔记
Andy杨
CKA-专栏kubernetesdocker笔记
一、Kubernetes核心概念1.有了Docker,为什么还用Kubernetes1)企业需求独立性问题:Docker容器本质上是独立存在的,多个容器跨主机提供服务时缺乏统一管理机制负载均衡需求:为提高业务并发和高可用,企业会使用多台服务器部署多个容器实例,但Docker本身不具备负载均衡能力管理复杂度:随着Docker主机和容器数量增加,面临部署、升级、监控等统一管理难题运维效率:单机升
- 【osgEarth】在osgEarth中实现的一些模型效果:雷达波、通信链路、爆炸、尾焰、轨迹、文字标牌等
bailang_zhizun
OSGosgEarthQTqtc++
学习osgEarth也有一段时间了,记录一下最近一段时间的学习成果。主要是在osgEarth三维场景中实现了一些模型效果,部分模型参考借鉴了西安恒歌的一些显示效果(当然是不能和他们比的doge),期间也从杨总(freesouths)的一些资料、文章中学到了很多,在此也感谢杨总他们的无私奉献。1、简单的仿真小场景简单的仿真小场景,感兴趣的可以看看。基于osgEarth制作的一个简单的飞机对抗仿真小场
- 【前端】【Echarts】【Liquidfill 水球图】深入理解 ECharts Liquidfill 水球图:从入门到进阶
患得患失949
Echarts学习数据大屏前端echartsjavascript
效果深入理解EChartsLiquidfill水球图:从入门到进阶在可视化数据展示中,水球图(Liquidfill)是一种极具表现力的图表。它形象地用“水位高低”表示某个百分比或完成度,非常适合展示指标进度、占比、加载状态等。本文将结合实际HTML示例,带你全面掌握如何使用ECharts+echarts-liquidfill插件绘制水球图,并通过多个实例逐步讲解配置技巧。准备工作在HTML中使用水
- 深度学习实战-使用TensorFlow与Keras构建智能模型
程序员Gloria
Python超入门TensorFlowpython
深度学习实战-使用TensorFlow与Keras构建智能模型深度学习已经成为现代人工智能的重要组成部分,而Python则是实现深度学习的主要编程语言之一。本文将探讨如何使用TensorFlow和Keras构建深度学习模型,包括必要的代码实例和详细的解析。1.深度学习简介深度学习是机器学习的一个分支,使用多层神经网络来学习和表示数据中的复杂模式。其广泛应用于图像识别、自然语言处理、推荐系统等领域。
- MVVMDemo:一款现代Android开发的最佳实践示例
MVVMDemo:一款现代Android开发的最佳实践示例本文将向您介绍项目,这是一个基于MVVM(Model-View-ViewModel)架构模式的Android应用实例,旨在帮助开发者更好地理解和应用这一流行的软件设计模式。项目概述MVVMDemo是由zhouxu88维护的一个开源项目,它展示了如何在Android平台上有效地实施MVVM架构。此项目包括了基本的数据绑定、LiveData观测
- AI产品经理需要了解的算法知识
AI劳模
人工智能产品经理AI产品经理AI产品经理入门零基础入门产品经理算法语言模型
1、自然语言生成(NLG)自然语言生成(NaturalLanguageGeneration,简称NLG)是一种人工智能技术,它的目标是将计算机的数据、逻辑或算法产生的信息转换成人类可读的自然语言文本。换句话说,NLG能让机器“学会”写文章、报告、故事或者其他任何形式的文字,就像人类作家那样。这项技术使得机器能够理解复杂的数据并将其转化为易于理解的语言,以适应不同的受众和情境。应用实例:金融报告自动
- Qt5开发从入门到精通——第五篇一节( 文本编辑器 Easy Word 开发 V1.0 详解 )
东.'
Qt5开发从入门到精通qt开发语言windowsc++c语言
欢迎小伙伴的点评✨✨,相互学习、互关必回、全天在线博主本着开源的精神交流Qt开发的经验、将持续更新续章,为社区贡献博主自身的开源精神文章目录前言一、主窗口概述基本元素1.1、菜单栏1.2、状态栏1.3、工具栏1.4、描接部件1.5、中心部件二、文本编辑器EasyWordV1.0基本功能解析三、文本编辑器EasyWordV1.0效果实例四、文本编辑器EasyWordV1.0基本原码框架设计show
- 【WPF实战】MVVM中如何从数据模型反查自定义控件实例(ImageView + Halcon)
【WPF实战】MVVM中如何从数据模型反查自定义控件实例(ImageView+Halcon)在使用PrismMVVM架构开发WPF应用时,我们通常遵循“数据驱动UI”的设计原则。但有时,我们希望从数据层反向获取控件实例,比如:✔在后台操作对应的Halcon控件HSmartWindowControlWPF,✔动态控制某一个图像窗口的图层或内容。本篇文章将通过一个实际例子,讲解如何优雅地实现这一反向访
- Xilinx系FPGA学习笔记(三)Vivado的仿真及ILA使用
贾saisai
FPGA学习fpga开发学习笔记
系列文章目录文章目录系列文章目录前言仿真验证(类似modelsim)ILA在线调试工具添加ILAILA的例化ILA的使用前言接着学习vivado的使用方法仿真验证(类似modelsim)首先类似添加.v文件的方法,在File-AddSource中选择Addorcreatesimulationsources或者直接在Sources里面选就行然后就编写testbench,类似之前介绍的modelsim
- Python中的`self`:深入理解实例方法的第一个参数
在Python的面向对象编程中,self是一个经常遇到的术语,但对于初学者来说,它可能会引起困惑。为什么我们需要它?它是如何工作的?在本篇文章中,我们将深入探讨self的工作原理以及它在Python编程中的重要性。1.什么是self?在Python中,self是类的实例方法的一个参数,代表类的实例对象本身。实际上,当我们调用一个实例的方法时,Python会自动传递这个实例作为第一个参数,这就是se
- Python中的self详细解析
cocaine8
python开发语言
在Python中,self是一个表示对象自身的参数,通常作为方法的第一个参数。它是一个惯用的名称,但实际上可以使用任何名称,只要它在方法定义中的位置正确即可。self参数用于访问对象的属性和调用对象的方法。当我们创建一个实例对象时,Python会自动将该实例对象作为self参数传递给方法。这样,在方法中就可以通过self来访问实例对象的属性和调用实例对象的方法。下面是一个示例:classPerso
- python 函数参数self_Python 类self 详解
weixin_39762464
python函数参数self
Python中的self是学习类的一个难点,很多初学者学到Pythonself的时候,都会出现难以理解的情况,下面,蜗牛博客就为您进行讲解一下Python中的self。UpdatedonNov-02-2018:一、首先要明确几个概念:1.self代表类的实例,而非类。例:classPerson:defpri(self):print(self)a=Person()a.pri()print(id(a)
- java线程的无限循环和退出
3213213333332132
java
最近想写一个游戏,然后碰到有关线程的问题,网上查了好多资料都没满足。
突然想起了前段时间看的有关线程的视频,于是信手拈来写了一个线程的代码片段。
希望帮助刚学java线程的童鞋
package thread;
import java.text.SimpleDateFormat;
import java.util.Calendar;
import java.util.Date
- tomcat 容器
BlueSkator
tomcatWebservlet
Tomcat的组成部分 1、server
A Server element represents the entire Catalina servlet container. (Singleton) 2、service
service包括多个connector以及一个engine,其职责为处理由connector获得的客户请求。
3、connector
一个connector
- php递归,静态变量,匿名函数使用
dcj3sjt126com
PHP递归函数匿名函数静态变量引用传参
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8">
<title>Current To-Do List</title>
</head>
<body>
- 属性颜色字体变化
周华华
JavaScript
function changSize(className){
var diva=byId("fot")
diva.className=className;
}
</script>
<style type="text/css">
.max{
background: #900;
color:#039;
- 将properties内容放置到map中
g21121
properties
代码比较简单:
private static Map<Object, Object> map;
private static Properties p;
static {
//读取properties文件
InputStream is = XXX.class.getClassLoader().getResourceAsStream("xxx.properti
- [简单]拼接字符串
53873039oycg
字符串
工作中遇到需要从Map里面取值拼接字符串的情况,自己写了个,不是很好,欢迎提出更优雅的写法,代码如下:
import java.util.HashMap;
import java.uti
- Struts2学习
云端月影
最近开始关注struts2的新特性,从这个版本开始,Struts开始使用convention-plugin代替codebehind-plugin来实现struts的零配置。
配置文件精简了,的确是简便了开发过程,但是,我们熟悉的配置突然disappear了,真是一下很不适应。跟着潮流走吧,看看该怎样来搞定convention-plugin。
使用Convention插件,你需要将其JAR文件放
- Java新手入门的30个基本概念二
aijuans
java新手java 入门
基本概念: 1.OOP中唯一关系的是对象的接口是什么,就像计算机的销售商她不管电源内部结构是怎样的,他只关系能否给你提供电就行了,也就是只要知道can or not而不是how and why.所有的程序是由一定的属性和行为对象组成的,不同的对象的访问通过函数调用来完成,对象间所有的交流都是通过方法调用,通过对封装对象数据,很大限度上提高复用率。 2.OOP中最重要的思想是类,类是模板是蓝图,
- jedis 简单使用
antlove
javarediscachecommandjedis
jedis.RedisOperationCollection.java
package jedis;
import org.apache.log4j.Logger;
import redis.clients.jedis.Jedis;
import java.util.List;
import java.util.Map;
import java.util.Set;
pub
- PL/SQL的函数和包体的基础
百合不是茶
PL/SQL编程函数包体显示包的具体数据包
由于明天举要上课,所以刚刚将代码敲了一遍PL/SQL的函数和包体的实现(单例模式过几天好好的总结下再发出来);以便明天能更好的学习PL/SQL的循环,今天太累了,所以早点睡觉,明天继续PL/SQL总有一天我会将你永远的记载在心里,,,
函数;
函数:PL/SQL中的函数相当于java中的方法;函数有返回值
定义函数的
--输入姓名找到该姓名的年薪
create or re
- Mockito(二)--实例篇
bijian1013
持续集成mockito单元测试
学习了基本知识后,就可以实战了,Mockito的实际使用还是比较麻烦的。因为在实际使用中,最常遇到的就是需要模拟第三方类库的行为。
比如现在有一个类FTPFileTransfer,实现了向FTP传输文件的功能。这个类中使用了a
- 精通Oracle10编程SQL(7)编写控制结构
bijian1013
oracle数据库plsql
/*
*编写控制结构
*/
--条件分支语句
--简单条件判断
DECLARE
v_sal NUMBER(6,2);
BEGIN
select sal into v_sal from emp
where lower(ename)=lower('&name');
if v_sal<2000 then
update emp set
- 【Log4j二】Log4j属性文件配置详解
bit1129
log4j
如下是一个log4j.properties的配置
log4j.rootCategory=INFO, stdout , R
log4j.appender.stdout=org.apache.log4j.ConsoleAppender
log4j.appender.stdout.layout=org.apache.log4j.PatternLayout
log4j.appe
- java集合排序笔记
白糖_
java
public class CollectionDemo implements Serializable,Comparable<CollectionDemo>{
private static final long serialVersionUID = -2958090810811192128L;
private int id;
private String nam
- java导致linux负载过高的定位方法
ronin47
定位java进程ID
可以使用top或ps -ef |grep java
![图片描述][1]
根据进程ID找到最消耗资源的java pid
比如第一步找到的进程ID为5431
执行
top -p 5431 -H
![图片描述][2]
打印java栈信息
$ jstack -l 5431 > 5431.log
在栈信息中定位具体问题
将消耗资源的Java PID转
- 给定能随机生成整数1到5的函数,写出能随机生成整数1到7的函数
bylijinnan
函数
import java.util.ArrayList;
import java.util.List;
import java.util.Random;
public class RandNFromRand5 {
/**
题目:给定能随机生成整数1到5的函数,写出能随机生成整数1到7的函数。
解法1:
f(k) = (x0-1)*5^0+(x1-
- PL/SQL Developer保存布局
Kai_Ge
近日由于项目需要,数据库从DB2迁移到ORCAL,因此数据库连接客户端选择了PL/SQL Developer。由于软件运用不熟悉,造成了很多麻烦,最主要的就是进入后,左边列表有很多选项,自己删除了一些选项卡,布局很满意了,下次进入后又恢复了以前的布局,很是苦恼。在众多PL/SQL Developer使用技巧中找到如下这段:
&n
- [未来战士计划]超能查派[剧透,慎入]
comsci
计划
非常好看,超能查派,这部电影......为我们这些热爱人工智能的工程技术人员提供一些参考意见和思想........
虽然电影里面的人物形象不是非常的可爱....但是非常的贴近现实生活....
&nbs
- Google Map API V2
dai_lm
google map
以后如果要开发包含google map的程序就更麻烦咯
http://www.cnblogs.com/mengdd/archive/2013/01/01/2841390.html
找到篇不错的文章,大家可以参考一下
http://blog.sina.com.cn/s/blog_c2839d410101jahv.html
1. 创建Android工程
由于v2的key需要G
- java数据计算层的几种解决方法2
datamachine
javasql集算器
2、SQL
SQL/SP/JDBC在这里属于一类,这是老牌的数据计算层,性能和灵活性是它的优势。但随着新情况的不断出现,单纯用SQL已经难以满足需求,比如: JAVA开发规模的扩大,数据量的剧增,复杂计算问题的涌现。虽然SQL得高分的指标不多,但都是权重最高的。
成熟度:5星。最成熟的。
- Linux下Telnet的安装与运行
dcj3sjt126com
linuxtelnet
Linux下Telnet的安装与运行 linux默认是使用SSH服务的 而不安装telnet服务 如果要使用telnet 就必须先安装相应的软件包 即使安装了软件包 默认的设置telnet 服务也是不运行的 需要手工进行设置 如果是redhat9,则在第三张光盘中找到 telnet-server-0.17-25.i386.rpm
- PHP中钩子函数的实现与认识
dcj3sjt126com
PHP
假如有这么一段程序:
function fun(){
fun1();
fun2();
}
首先程序执行完fun1()之后执行fun2()然后fun()结束。
但是,假如我们想对函数做一些变化。比如说,fun是一个解析函数,我们希望后期可以提供丰富的解析函数,而究竟用哪个函数解析,我们希望在配置文件中配置。这个时候就可以发挥钩子的力量了。
我们可以在fu
- EOS中的WorkSpace密码修改
蕃薯耀
修改WorkSpace密码
EOS中BPS的WorkSpace密码修改
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 201
- SpringMVC4零配置--SpringSecurity相关配置【SpringSecurityConfig】
hanqunfeng
SpringSecurity
SpringSecurity的配置相对来说有些复杂,如果是完整的bean配置,则需要配置大量的bean,所以xml配置时使用了命名空间来简化配置,同样,spring为我们提供了一个抽象类WebSecurityConfigurerAdapter和一个注解@EnableWebMvcSecurity,达到同样减少bean配置的目的,如下:
applicationContex
- ie 9 kendo ui中ajax跨域的问题
jackyrong
AJAX跨域
这两天遇到个问题,kendo ui的datagrid,根据json去读取数据,然后前端通过kendo ui的datagrid去渲染,但很奇怪的是,在ie 10,ie 11,chrome,firefox等浏览器中,同样的程序,
浏览起来是没问题的,但把应用放到公网上的一台服务器,
却发现如下情况:
1) ie 9下,不能出现任何数据,但用IE 9浏览器浏览本机的应用,却没任何问题
- 不要让别人笑你不能成为程序员
lampcy
编程程序员
在经历六个月的编程集训之后,我刚刚完成了我的第一次一对一的编码评估。但是事情并没有如我所想的那般顺利。
说实话,我感觉我的脑细胞像被轰炸过一样。
手慢慢地离开键盘,心里很压抑。不禁默默祈祷:一切都会进展顺利的,对吧?至少有些地方我的回答应该是没有遗漏的,是不是?
难道我选择编程真的是一个巨大的错误吗——我真的永远也成不了程序员吗?
我需要一点点安慰。在自我怀疑,不安全感和脆弱等等像龙卷风一
- 马皇后的贤德
nannan408
马皇后不怕朱元璋的坏脾气,并敢理直气壮地吹耳边风。众所周知,朱元璋不喜欢女人干政,他认为“后妃虽母仪天下,然不可使干政事”,因为“宠之太过,则骄恣犯分,上下失序”,因此还特地命人纂述《女诫》,以示警诫。但马皇后是个例外。
有一次,马皇后问朱元璋道:“如今天下老百姓安居乐业了吗?”朱元璋不高兴地回答:“这不是你应该问的。”马皇后振振有词地回敬道:“陛下是天下之父,
- 选择某个属性值最大的那条记录(不仅仅包含指定属性,而是想要什么属性都可以)
Rainbow702
sqlgroup by最大值max最大的那条记录
好久好久不写SQL了,技能退化严重啊!!!
直入主题:
比如我有一张表,file_info,
它有两个属性(但实际不只,我这里只是作说明用):
file_code, file_version
同一个code可能对应多个version
现在,我想针对每一个code,取得它相关的记录中,version 值 最大的那条记录,
SQL如下:
select
*
- VBScript脚本语言
tntxia
VBScript
VBScript 是基于VB的脚本语言。主要用于Asp和Excel的编程。
VB家族语言简介
Visual Basic 6.0
源于BASIC语言。
由微软公司开发的包含协助开发环境的事
- java中枚举类型的使用
xiao1zhao2
javaenum枚举1.5新特性
枚举类型是j2se在1.5引入的新的类型,通过关键字enum来定义,常用来存储一些常量.
1.定义一个简单的枚举类型
public enum Sex {
MAN,
WOMAN
}
枚举类型本质是类,编译此段代码会生成.class文件.通过Sex.MAN来访问Sex中的成员,其返回值是Sex类型.
2.常用方法
静态的values()方