绘制几何图形,生成辅助线的思路
目录
辅助线的概念
绘制线规则
捕捉辅助线的思路
生成辅助线的思路
总结
在实际绘制几何图形过程时,有几个工具比较实用:
- 鼠标绘制时,焦点捕捉已绘制图形的端点、线段上;
- 撤销与回退
- 辅助线
焦点捕捉的功能的思路相对比较简单,不断地比较当前鼠标所在的屏幕像素点为圆心,R为半径的搜索圆与绘制图形的端点和线段是否相交的问题。但在实时的图形编程的难点在于细节,至于如何优化搜索的速度,有很多方法,涉及比较深的图形搜索方法,比如对所有的图形空间先建立R树空间索引,这里不做详细介绍。
撤销与回退的功能则更加简单,其实就是状态管理,入栈和出栈的问题。
接下来,我们讲述一下在绘制过程中是辅助线的实现思路
辅助线的概念
辅助线分为静态辅助线和动态辅助线。
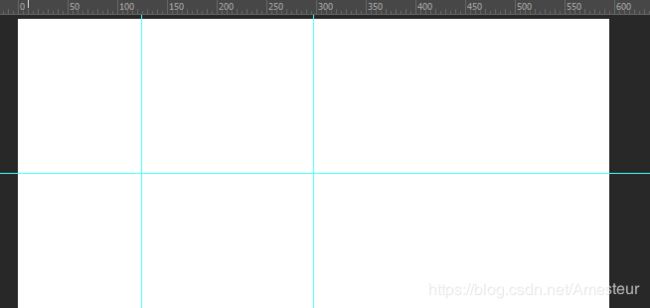
- 静态辅助线是指一直摆放在屏幕上不动的辅助线,鼠标能捕捉到上面,比如PS的辅助线。
- 动态辅助线是指在绘制过程中,根据已绘制的内容,智能的生成辅助线,并能让鼠标捕捉到上面


绘制线规则
- 鼠标在移动过程中,在指定的阈值范围内能捕捉到辅助线上的最近的点
- 每次绘制端点后,能够根据新生成的端点,生成一条相同方向和正交(相互垂直)的辅助线(根据需要生成指定角度的辅助线)
- 在绘制完成后,清除辅助线。
捕捉辅助线的思路
鼠标在屏幕移动过程中,在辅助线附近时,能够捕捉到辅助线是指鼠标的绘制焦点能自动移动到辅助线上,实际移动的是绘制焦点而不是鼠标点。而实现捕捉到辅助线,需要以下两步:
1. 计算当前绘制焦点与辅助线的最短距离是否少于定义的阈值A(A是一个相对于比较小的值),若少于阈值A,则绘制焦点设置为辅助线上离当前绘制焦点最近的点。

因此,关键的地方,在于获取点到线段的最近的点,以及点与点之间的距离。核心代码如下:
/**
* @desc 此方法既获取点到多段连续的线段中最近的点,以及返回最短的距离
* @param {Array} coordinates 多段连续的线段的坐标数组.[x1,y1,x2,y2,x3,y3...]
* @param {number} offset 起始点的索引偏移量.
* @param {number} end 终点的索引.
* @param {number} stride 坐标所占的个数,二维图形为2.
* @param {number} maxDelta 多段连续的线段中每两个相邻点中最长的那一段的距离的平方.
* @param {boolean} isRing 是否是环, 线段是否闭合.
* @param {number} x 目标点的x坐标.
* @param {number} y 目标点的y坐标
* @param {Array} closestPoint 输出的最近的点的对象.
* @param {number} [minSquaredDistance=Infinity] 最小的垂直距离,用于较少比较.默认Infinity
* @return {number} 点到多段连续的线段中最短的距离.
*/
function assignClosestPoint(coordinates, offset, end, stride,
maxDelta, isRing, x, y, closestPoint, minSquaredDistance) {
if (offset == end) { // 如果起点的索引和终点索引的一致,表示参数错误
return minSquaredDistance;
}
let i, squaredDistance;
if (maxDelta === 0) { // 如果最大的相邻点间的距离为0,表示线段各个点为同一个点
// 所有点都相同,所以只需测试第一点
squaredDistance = squaredDx( // squaredDx方法获取两点之间的垂直距离的平方
x, y, coordinates[offset], coordinates[offset + 1]);
if (squaredDistance < minSquaredDistance) { // 如果绘制焦点与线段第一个点的距离少于定义的最小距离,则最近的点为线段的第一个点
for (i = 0; i < stride; ++i) {
closestPoint[i] = coordinates[offset + i];
}
closestPoint.length = stride;
return squaredDistance;
} else {
return minSquaredDistance;
}
}
const tmpPoint = [NaN, NaN]; // 用于临时存储点到线段的最近的点
let index = offset + stride;
while (index < end) {
assignClosest( // assignClosest方法是获取点到其中一段线段(只有两个坐标构成的线段)
coordinates, index - stride, index, stride, x, y, tmpPoint);
squaredDistance = squaredDx(x, y, tmpPoint[0], tmpPoint[1]); //得到目标点到任意一个线段的最短距离的平方
if (squaredDistance < minSquaredDistance) {
minSquaredDistance = squaredDistance;
for (i = 0; i < stride; ++i) {
closestPoint[i] = tmpPoint[i];
}
closestPoint.length = stride;
index += stride;
} else {
// 跳过多个点,因为我们知道所有跳过的点都不能比我们找到的最近点更近。我们知道这是因为我们知
// 道当前点有多近,到目前为止我们找到的最近点有多近,以及连续点之间的最大距离。例如,如果我
// 们当前的最近点距离是10,那么到目前为止我们发现的最好的距离是3,并且连续点之间的最大距离是2,
// 那么我们需要跳过至少(10-3)/2==3(向下取整)点,以便有机会找到更近的点。我们使用
// math.max(…,1)来确保我们总是前进至少一个点,以避免无限循环。.
index += stride * Math.max(
((Math.sqrt(squaredDistance) -
Math.sqrt(minSquaredDistance)) / maxDelta) | 0, 1);
}
}
if (isRing) {
// 如果是环的话,则还需要检查最后的闭合的那一段线段
assignClosest(
coordinates, end - stride, offset, stride, x, y, tmpPoint);
squaredDistance = squaredDx(x, y, tmpPoint[0], tmpPoint[1]);
if (squaredDistance < minSquaredDistance) {
minSquaredDistance = squaredDistance;
for (i = 0; i < stride; ++i) {
closestPoint[i] = tmpPoint[i];
}
closestPoint.length = stride;
}
}
return minSquaredDistance;
}
/**
* @desc 计算距离
* @param {*} p1 起始点
* @param {*} p2 终结点
*/
function dist2D (p1, p2) {
var dx = p1[0] - p2[0]
var dy = p1[1] - p2[1]
return Math.sqrt(dx * dx + dy * dy)
}
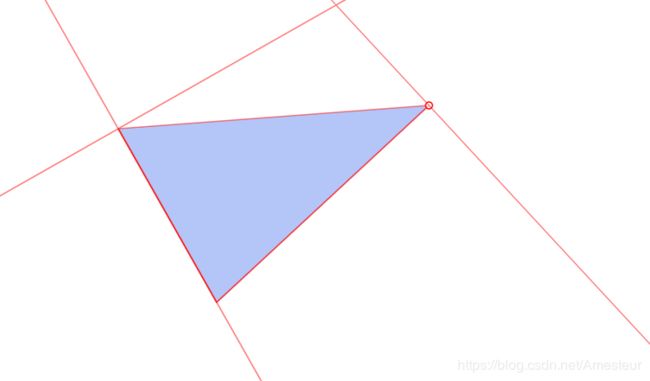
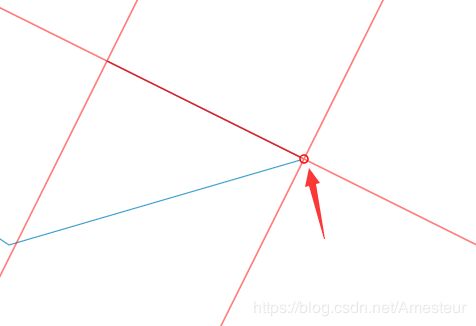
2. 上述第一个点是针对,只有一条辅助线满足条件的情况。若存在,多条辅助线满足,绘制焦点到辅助线的距离少于阈值A,则取任意两条辅助的焦点作为最新的绘制焦点。(因为阈值A比较小,可以默认其差别不大)
关键在于,求取两个线段的交点,关键代码如下:
/**
* @description 根据两条线段的端点,得到线段相交的点
* @param {*} d1 线段1的两个端点坐标
* @param {*} d2 线段2的两个端点坐标
*/
function getIntersectionPoint (d1, d2) {
var d1x = d1[1][0] - d1[0][0]
var d1y = d1[1][1] - d1[0][1]
var d2x = d2[1][0] - d2[0][0]
var d2y = d2[1][1] - d2[0][1]
var det = d1x * d2y - d1y * d2x
if (det !== 0) {
var k = (d1x * d1[0][1] - d1x * d2[0][1] - d1y * d1[0][0] + d1y * d2[0][0]) / det
return [d2[0][0] + k * d2x, d2[0][1] + k * d2y]
} else return false
}上述的距离,一般指的是屏幕像素坐标的距离。
最后,焦点不断捕捉的过程是实时的,因此,当鼠标移动过程中需要不断地执行上述的两个步骤。因此,调优是需要下点功夫的。
生成辅助线的思路
必须定义当绘制完成图形的某个端点时的回调方法。在回调方法中,其实根据已知的点坐标,计算辅助线的方程,并根据方程进行等距离的点插值。如下步骤:
1. 根据刚绘制的端点与上一个端点,则得到新的直线方程的斜率(辅助线是90度,45度或者延长线)及其经过的一个点(刚绘制的端点),得到辅助线方程
2. 得到直线方程后,根据直线的点向式的代数形式,以固定的距离进行插值,得到屏幕上的辅助线。
/** 新增辅助线
* @param {Array} v 坐标数组,只有两个断电
* @return {*} 辅助线对象
*/
function addGuide (v, ortho) {
if (v) {
const guideLength = Math.max(
this.projExtent_[2] - this.projExtent_[0],
this.projExtent_[3] - this.projExtent_[1]
)// 从定义的最大空间范围中获取辅助线的最大长度
const extent = this.projExtent_// 获取最大空间范围
const dx = v[0][0] - v[1][0]
const dy = v[0][1] - v[1][1]
const d = 1 / Math.sqrt(dx * dx + dy * dy)
const generateLine = function (/** 方向 **/loopDir) {
var p, g = []
var loopCond = guideLength * loopDir * 2
for (var i = 0; loopDir > 0 ? i < loopCond : i > loopCond; i += (guideLength * loopDir) / 4) { // 插值100个等距离的点
if (ortho) p = [v[0][0] + dy * d * i, v[0][1] - dx * d * i]
else p = [v[0][0] + dx * d * i, v[0][1] + dy * d * i]
// 判断插值的点是否在最大的extent里
if (containsCoordinate(extent, p)) g.push(p)
else break
}
return new LineString([g[0], g[g.length - 1]]))
}
var f0 = generateLine(1)// 正向辅助线
var f1 = generateLine(-1)// 反向辅助线
return [f0, f1]
}
}总结
绘制辅助线是一个实时性比较强的功能,原理是简单的几何拓扑知识。实现起来比较简单,几何的实时拓扑难点在于性能调优,选择合适的策略去实现功能。