数字图像处理,自适应中值滤波的C++实现
自适应中值滤波的原理
自适应中值滤波的思想是根据噪声密度改变滤波窗口的大小,同时对噪声点和信号点采取不同的处理方法。对噪声点进行中值滤波,对信号点保持其灰度值不变。
设为fij为点(i,j)的灰度值,Sij为当前工作窗口,fmin,fmax和fmed分别为Sij中的灰度最小值、灰度最大值和灰度中值,令maxize为预设的允许最大窗口。自适应中值滤波的步骤如下:
1)若 fmin< fmed
2)若 fmin< fij
可以看出,算法中噪声的检测和认定时以 fmin和 fmax为基准的,如果 fmin< fmed
接着根据fmin< fij
引入自适应中值滤波算法主要有3 个目的:
一是去除脉冲噪声;
二是平滑其他非脉冲噪声;
三是减少诸如物体边界细化或粗化等失真。
自适应中值滤波的流程图如下图所示。
参考代码:
/////////////自适应中值滤波/////////////////////////////////
int adp_media_filter(unsigned char* inbuffer,int width,int height,int maxwinsize,unsigned char* outbuffer)
{
int pos = (maxwinsize - 1) / 2;
memcpy(outbuffer,inbuffer,width*height);
for (int m = pos; m < height - pos; m++)//当前中心位置(m,n)
{
for (int n = pos; n < width - pos; n++)
{
int curwinsize = 3; //设置初始滤波窗口大小
while (curwinsize <= maxwinsize)
{
int curpos = (curwinsize - 1) / 2;
int winpos = 0;
int lens = curwinsize*curwinsize;
int* windows = new int[lens];
for (int i = -curpos; i < curpos + 1; i++)
for (int j = -curpos; j < curpos + 1; j++)
windows[winpos++] = inbuffer[(m + i)*width + n + j];
sort(windows, lens);
int fmin = windows[0];
int fmax = windows[lens - 1];
int fmed = windows[(lens - 1) / 2];
int A1 = fmed - fmin;
int A2 = fmed - fmax;
if (A1 > 0 && A2 < 0)//第一层噪声检测,fmed是不是噪声
{
//满足fmin< fmed < fmax,表明fmed不是噪声
int B1 = inbuffer[m*width + n] - fmin;//当前窗口中心值inbuffer[m*width + n]
int B2 = inbuffer[m*width + n] - fmax;
//满足fmin< fmn < fmax,表明fmn不是噪声
if (B1 > 0 && B2 < 0)//第二层检测,fmn是不是噪声
outbuffer[m*width + n] = inbuffer[m*width + n];//fmn和fmed都不是噪声优先输出当前窗口中心值
else
outbuffer[m*width + n] = fmed;//fmn是噪声,输出中间值重新估计该点
delete[] windows;
windows = NULL;
break;
}
curwinsize += 2;
delete[] windows;
windows = NULL;
}
}
}
//对边界进行处理,与中值滤波一样
for (int k = 0;k < pos;k++)
for (int l =pos;l < width-pos;l++)
outbuffer[k*width+l] = outbuffer[pos*width+l];
for(int a=height-pos;a < height;a++)
for(int b=pos;b < width-pos;b++)
outbuffer[a*width+b] = outbuffer[(height-pos-1)*width+b];
for(int c = 0;c < pos;c++)
for(int d=0;d < height;d++)
outbuffer[d*width+c] = outbuffer[d*width+pos];
for (int e = width-pos;e < width;e++)
for(int f = 0;f < height;f++)
outbuffer[f*width+e] = outbuffer[f*width+width-pos-1];
return 0;
}实验结果:
以下所有结果均为C++处理。
1,对原图像进行处理的结果(左为原图)
可以发现,自适应中值滤波对图像边缘的保护相当好


2,对乘性噪声图像进行处理的结果(左为噪声图)
注意该噪声为matlab中的乘性噪声,可以发现对乘性噪声的处理效果相当差。

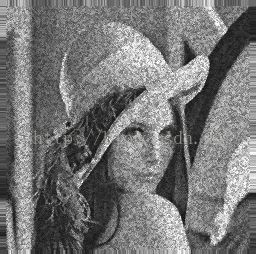
3,对椒盐噪声图像进行处理的结果(左为噪声图)
注意该噪声为matlab中的椒盐噪声,可以发现对椒盐噪声的处理效果优秀。


最后在此处收录一份别人写的matlab程序:
function f = adpmedian(g, Smax)
%ADPMEDIAN Perform adaptive median filtering.
% F = ADPMEDIAN(G, SMAX) performs adaptive median filtering of
% image G. The median filter starts at size 3-by-3 and iterates up
% to size SMAX-by-SMAX. SMAX must be an odd integer greater than 1.
% Copyright 2002-2004 R. C. Gonzalez, R. E. Woods, & S. L. Eddins
% Digital Image Processing Using MATLAB, Prentice-Hall, 2004
% $Revision: 1.5 $ $Date: 2003/11/21 14:19:05 $
% SMAX must be an odd, positive integer greater than 1.
if (Smax <= 1) | (Smax/2 == round(Smax/2)) | (Smax ~= round(Smax))
error('SMAX must be an odd integer > 1.')
end
[M, N] = size(g);
% Initial setup.
f = g;
f(:) = 0;
alreadyProcessed = false(size(g));
% Begin filtering.
for k = 3:2:Smax
zmin = ordfilt2(g, 1, ones(k, k), 'symmetric');
zmax = ordfilt2(g, k * k, ones(k, k), 'symmetric');
zmed = medfilt2(g, [k k], 'symmetric');
processUsingLevelB = (zmed > zmin) & (zmax > zmed) & ...
~alreadyProcessed;
zB = (g > zmin) & (zmax > g);
outputZxy = processUsingLevelB & zB;
outputZmed = processUsingLevelB & ~zB;
f(outputZxy) = g(outputZxy);
f(outputZmed) = zmed(outputZmed);
alreadyProcessed = alreadyProcessed | processUsingLevelB;
if all(alreadyProcessed(:))
break;
end
end
% Output zmed for any remaining unprocessed pixels. Note that this
% zmed was computed using a window of size Smax-by-Smax, which is
% the final value of k in the loop.
f(~alreadyProcessed) = zmed(~alreadyProcessed);参考资源:
【1】自适应中值滤波算法在图像处理中的应用,刘 颖,陈谨女,长安大学电子与控制工程工程学院
【2】一种改进的自适应中值滤波方法,卫保国,西北工业大学电子信息学院,2008