MATLAB实现的霍夫变换直线拟合 直线检测
实验要求,生成5条直线并添加噪声,使用霍夫变换拟合直线
霍夫变换原理请参考此博客:https://blog.csdn.net/u010712012/article/details/86104053
- 实验代码
clc
clear
%生成五条标准直线用于直线检测%
% x1=sort(100.*rand(1,100));
% y1=-4*x1+2;
% data1=[x1;y1];
% x2=sort(10+100.*rand(1,100));
% y2=x2+4;
% data2=[x2;y2];
% x3=sort(100.*rand(1,100));
% y3=14*x3+6;
% data3=[x3;y3];
% x4=sort(100.*rand(1,100));
% y4=-7*x4+8;
% data4=[x4;y4];
% x5=sort(100.*rand(1,100));
% y5=6*x5+10;
% data5=[x5;y5];
% data=[data1,data2,data3,data4,data5];%构建点集
%生成五条带噪声直线用于直线拟合%
%两个数据集二选一使用
x1=sort(100.*rand(1,100));
y1=x1+2+2.*rand(1,100);
data1=[x1;y1];
x2=sort(100.*rand(1,100));
y2=-4*x2+4+4.*randn(1,100);
data2=[x2;y2];
x3=sort(100.*rand(1,100));
y3=16*x3+6+6.*rand(1,100);
data3=[x3;y3];
x4=sort(100.*rand(1,100));
y4=-7*x4+8+8.*rand(1,100);
data4=[x4;y4];
x5=sort(100.*rand(1,100));
y5=6*x5+10+10.*randn(1,100);
data5=[x5;y5];
data=[data1,data2,data3,data4,data5];%构建点集
[m,n]=size(data);%统计点数
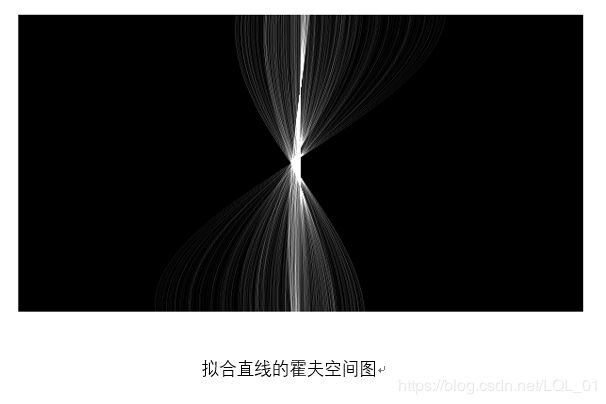
%构建霍夫空间
n_max=300;%霍夫空间的纵轴最大值
h=zeros(315,2*n_max);
theta_i=1;
sigma=70;%设置拟合阈值
i=0;
%直线公式推导
%y=sin(theta)/cos(theta)*x+b
%->p=b*cos(theta)=-sin(theta)*x+cos(theta)*y
for theta=0:0.01:3.14
p=[-sin(theta),cos(theta)];
d=p*data;
for i=1:n
%由于霍夫空间中d比较大,对d值进行了缩放
h(theta_i,round(d(i)/10+n_max))=h(theta_i,round(d(i)/10+n_max))+1;
end
theta_i=theta_i+1;
end
[theta_x,p]=find(h>sigma);%查找投票数大于sigma的位置
l_number=size(theta_x);%符合直线条数
r=(p-n_max)*10;%将还原回距离R
theta_x=0.01*theta_x;%将theta还原
figure('color','w');
plot(data(1,:),data(2,:),'*');
hold on
x_line=0:20:100;
for i=1:l_number
if(abs(cos(theta_x(i)))<0.01)%斜率不存在的情况
x=r(i);y=1:100;
plot(x,y,'r');
else
y=tan(theta_x(i))*x_line+r(i)/cos(theta_x(i));%画出拟合曲线
plot(x_line,y,'r');
end
end
hold off
figure('color','w');
imshow(uint8(10*h));%展示霍夫空间结果 实验结果展示
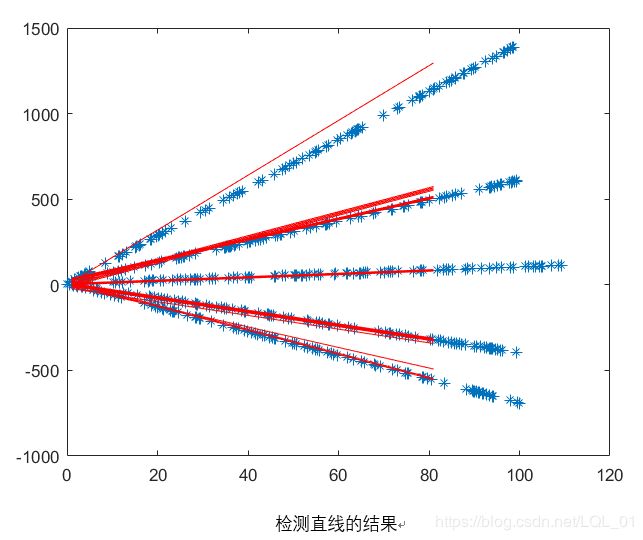
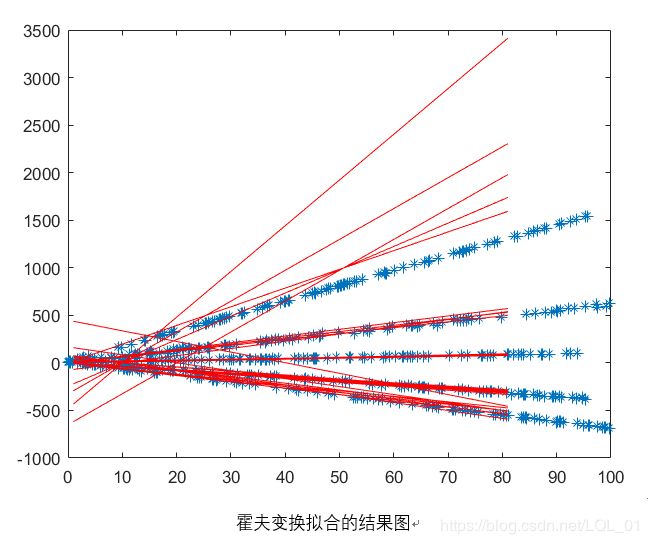
- 总结反思
当斜率过大时,由于tan函数的性质,小的角度误差,会引起大的斜率误差;想要拟合结果更精确可以增加角度theta的分辨率;
部分错误直线可能由于数据集分布问题,造成某一直线上分布有大量点而引起错误