STM32学习心得五:GPIO实验-基于位操作
记录一下,方便以后翻阅~
实验内容:跑马灯、蜂鸣器和按键输入
官方资料:
1)《STM32中文参考手册V10》第8章 通用和复用功能IO(GPIO和AFIO)
2)《Cortex-M3权威指南(中文)》第5章 位带操作
特点:位操作
原理图:
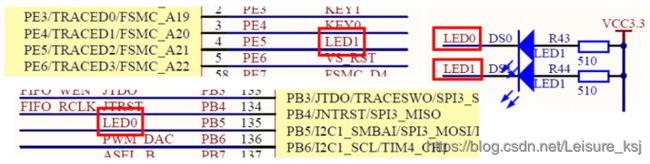
1)如图所示,跑马灯,PB5接LED0,PE5接LED1;
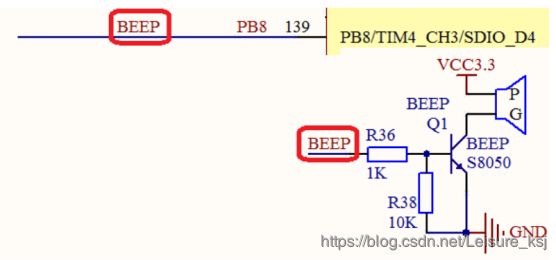
2)如图所示,蜂鸣器,PB8接BEEP(蜂鸣器);
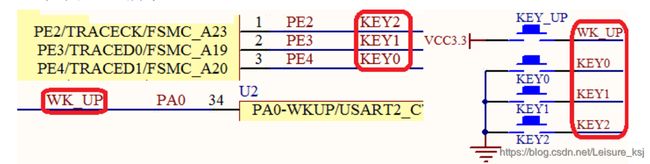
3)如图所示,PE4接KEY0,PE3接KEY1,PE2接KEY2,PA0接WK_UP。
工作原理不细讲,一定要看清外设与哪个GPIO管脚对接。
涉及已学GPIO库函数:
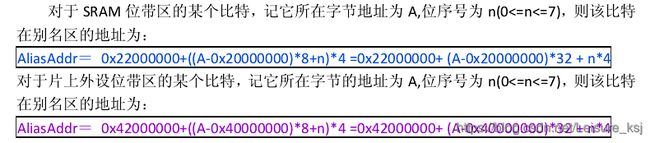
1)void GPIO_Init(GPIO_TypeDef* GPIOx,GPIO_InitTypeDef* GPIO_InitStruct); //初始化作用新知识:位操作地址计算方式:
 )
)
假设要令GPIOA的第五个管脚为输出:PAout(5),查看sys.h和stm32f10x.h两个头文件可知:
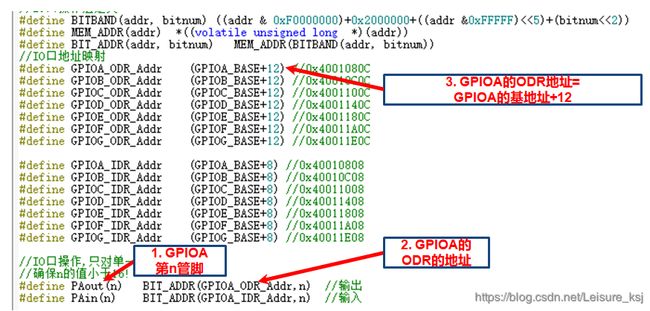
因此,GPIOA_ODR_Addr=0x4001080C,n=5。之前给的紫色公式与头文件中的关键代码一一对应,可算出PAout(5)的别名区地址。

因此,位操作可以这么玩:
在led.h头文件中定义:
#define LED0 PBout(5);在led.c文件中定义:
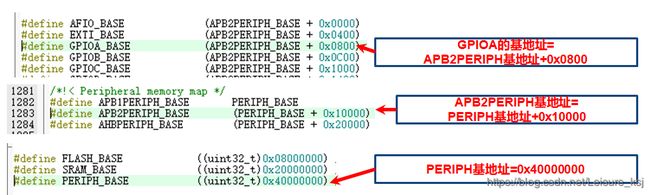
PBout(5)=0; //设GPIOB的第五管脚为低电平。最后再提一下为什么是GPIOA_BASE+12?STM32中文参考手册讲到,GPIOx_ODR的地址偏移是0Ch,因此是+12。对应的,GPIOx_IDR的地址偏移是0x08,因此是+8。至于GPIOA_BASE为什么等于APB2PERIPH_BASE+0x0800,没找到答案,大牛们可以解释下。


实验步骤:
1) 新建工程模板;
2) 新建HARDWARE空文件夹(与USER文件夹并列);
3) 在MDK软件中,新建led.c,beep.c和key.c三个.c文件以及对应的led.h,beep.h和key.h头文件,均保存在HARDWARE文件夹中;
4)led.h头文件代码分别如下:
#ifndef __LED_H
#define __LED_H
#include "sys.h"
void LED_Init(void); //初始化函数
#define LED0 PBout(5) // PB5
#define LED1 PEout(5) // PE5
#endif5)beep.h头文件代码分别如下:
#ifndef __BEEP_H
#define __BEEP_H
void BEEP_Init(void); //初始化函数
#define BEEP PBout(8) // PB8
#endif6)key.h头文件代码分别如下:
#ifndef __KEY_H
#define __KEY_H
#include "sys.h"
#define KEY0 PEin(4) //PE4
#define KEY1 PEin(3) //PE3
#define KEY2 PEin(2) //PE2
#define WK_UP PAin(0) //PA0 WK_UP
void KEY_Init(void);
u8 KEY_Scan(u8);
#endif7)led.c文件代码分别如下:
#include "led.h"
#include "sys.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE); //使能PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
LED0=1; //PB.5 输出高,LED0灭
GPIO_Init(GPIOE, &GPIO_InitStructure); //根据设定参数初始化GPIOE.5
LED1=1; //PE.5 输出高,LED1灭
}8)beep.c文件代码分别如下:
#include "beep.h"
#include "sys.h"
void BEEP_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
BEEP=0; //PB8 输出低,LED0灭
} 9)key.c文件代码分别如下:
#include "key.h"
#include "sys.h"
#include "delay.h"
void KEY_Init(void) //IO初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE); //使能PA,PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4; //KEY0-KEY2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE2,3,4
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.0
}
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1; //按键按松开标志
if(mode)key_up=1; //支持连按
if(key_up&&(KEY0==0||KEY1==0||KEY2==0||WK_UP==1))
{
delay_ms(10); //去抖动
key_up=0;
if(KEY0==0)return 1; //KEY0按下,即PE4为低电平
else if(KEY1==0)return 2; //KEY1按下,即PE3为低电平
else if(KEY2==0)return 3; //KEY2按下,即PE2为低电平
else if(WK_UP==1)return 4; //WK_UP按下,即PA0为高电平
}else if(KEY0==1&&KEY1==1&&KEY2==1&&WK_UP==0)key_up=1;
return 0; // 无按键按下
}10)在MDK软件中,右键Target1,单击Manage Project Items…,在Project Items界面、Groups一栏,新建HARDWARE,并将led.c,beep.c和key.c三个.c文件添加进来;
11)在MDK软件中,单击魔术棒,在C/C++选项里,单击Include
Paths右边的…,添加led.h,beep.h和key.h三个头文件的目录(即HARDWARE);
12)新建main.c主函数,代码如下:
#include "led.h"
#include "beep.h"
#include "key.h"
#include "sys.h"
#include "delay.h"
int main(void)
{
vu8 key=0;
delay_init();
LED_Init();
BEEP_Init();
KEY_Init();
while(1)
{
key=KEY_Scan(1);
if(key)
{
switch(key)
{
case 4:
BEEP=1; //控制蜂鸣器叫
break;
case 3:
LED0=0; //控制LED0亮
break;
case 2:
LED1=0; //控制LED1亮
break;
case 1:
LED0=0; //控制LED0亮
LED1=0; //控制LED1亮
break;
}
delay_ms(300); //延迟300ms
BEEP=0; //控制蜂鸣器不叫
LED0=1; //控制LED0灭
LED1=1; //控制LED1灭
}else delay_ms(10);
}
}13) 完成后即可运行看效果。
旧知识点:
1)复习如何使用FlyMcu调试程序,可参考STM32学习心得一:FlyMcu软件配置;
2) 复习如何新建工程模板,可参考STM32学习心得二:新建工程模板;
3) 复习key.c文件中u8 KEY_Scan(u8)函数的逻辑,可参考STM32学习心得三:GPIO实验-基于库函数;
4)复习寄存器地址,可参考STM32学习心得四:GPIO实验-基于寄存器。