动手学深度学习(tensorflow)---学习笔记整理(七、卷积神经网络篇)
有关公式、基本理论等大量内容摘自《动手学深度学习》(TF2.0版))
前面我们需要简洁实现都是用的Sequential来实现的,我们可能发现简洁实现很简单,但是内部细节可能很难控制。而自己从零开始实现又过于麻烦,而tf.keras.Model则可以实现上述的均衡。(具体内容就不详细介绍了)
下面开始卷积神经网络的相关概念
再说这个事情先说个事情,就是前面我们训练的图片向量输入时都展成一维向量了,这样其实是不对的,因为这种方法破坏了纵向之间的数据关系。


可以通过如下程序进行验证:
import tensorflow as tf
import numpy as np
print(tf.__version__)
def corr2d(X, K):
h, w = K.shape
Y = tf.Variable(tf.zeros((X.shape[0] - h + 1, X.shape[1] - w +1)))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j].assign(tf.cast(tf.reduce_sum(X[i:i+h, j:j+w] * K), dtype=tf.float32))
return Y
X = tf.constant([[0,1,2], [3,4,5], [6,7,8]])
K = tf.constant([[0,1], [2,3]])
print(corr2d(X, K))
![]()
检测图像中物体的边缘
![]()
如下图所示:

![]()
![]()
结果如下图所示:
实现代码:
import tensorflow as tf
import numpy as np
print(tf.__version__)
#卷积函数
def corr2d(X, K):
h, w = K.shape
Y = tf.Variable(tf.zeros((X.shape[0] - h + 1, X.shape[1] - w +1)))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j].assign(tf.cast(tf.reduce_sum(X[i:i+h, j:j+w] * K), dtype=tf.float32))
return Y
#检测图像的矩阵
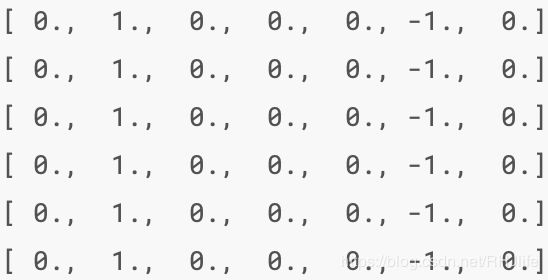
X = tf.Variable(tf.ones((6,8)))
X[:, 2:6].assign(tf.zeros(X[:,2:6].shape))
print(X)
#卷积核
K = tf.constant([[1,-1]], dtype = tf.float32)
#卷积后的结果
Y = corr2d(X, K)
print(Y)
通过上述我们可以发现卷积核可以检测矩阵的边缘(这只是举个例子,真正的图像的边缘会比这个复杂许多)
卷积层的权重更新
实现代码如下(其实和之前的思想一样的):
import tensorflow as tf
import numpy as np
print(tf.__version__)
#卷积函数
def corr2d(X, K):
h, w = K.shape
Y = tf.Variable(tf.zeros((X.shape[0] - h + 1, X.shape[1] - w +1)))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j].assign(tf.cast(tf.reduce_sum(X[i:i+h, j:j+w] * K), dtype=tf.float32))
return Y
#检测图像的矩阵
X = tf.Variable(tf.ones((6,8)))
X[:, 2:6].assign(tf.zeros(X[:,2:6].shape))
print(X)
#卷积核
K = tf.constant([[1,-1]], dtype = tf.float32)
#卷积后的结果
Y = corr2d(X, K)
print(Y)
X = tf.reshape(X, (1,6,8,1))
Y = tf.reshape(Y, (1,6,7,1))
print(Y)
conv2d = tf.keras.layers.Conv2D(1, (1,2))
print(Y.shape)
#预测值
Y_hat = conv2d(X)
for i in range(10):
with tf.GradientTape(watch_accessed_variables=False) as g:
g.watch(conv2d.weights[0])
Y_hat = conv2d(X)
#损失值
l = (abs(Y_hat - Y)) ** 2
dl = g.gradient(l, conv2d.weights[0])
#学习率
lr = 3e-2
update = tf.multiply(lr, dl)
#更新权重
updated_weights = conv2d.get_weights()
updated_weights[0] = conv2d.weights[0] - update
conv2d.set_weights(updated_weights)
if (i + 1)% 2 == 0:
print('batch %d, loss %.3f' % (i + 1, tf.reduce_sum(l)))
print(tf.reshape(conv2d.get_weights()[0],(1,2)))互相关运算和卷积运算

关键字:都是学出来的。如果不理解,可以把神经网络当成一个黑盒,里面相互关运算和卷积运算都是模型学习的出来的。
特征图和感受野

填充和步幅
这是卷积神经网络里面两个非常重要的两个参数。

填充:

验证代码如下:
import tensorflow as tf
import numpy as np
print(tf.__version__)
def comp_conv2d(conv2d, X):
X = tf.reshape(X,(1,) + X.shape + (1,))
Y = conv2d(X)
#input_shape = (samples, rows, cols, channels)
return tf.reshape(Y,Y.shape[1:3])
conv2d = tf.keras.layers.Conv2D(1, kernel_size=3, padding='same')
X = tf.random.uniform(shape=(8,8))
print(comp_conv2d(conv2d,X).shape)
步幅:

模拟代码如下(令高和宽上的步幅均为2):
import tensorflow as tf
import numpy as np
print(tf.__version__)
#模拟步幅
conv2d = tf.keras.layers.Conv2D(1, kernel_size=3, padding='same',strides=2)
print(comp_conv2d(conv2d, X).shape)
另一个比较复杂的代码:
import tensorflow as tf
import numpy as np
print(tf.__version__)
#模拟步幅(3,4)
conv2d = tf.keras.layers.Conv2D(1, kernel_size=(3,5), padding='valid', strides=(3,4))
print(comp_conv2d(conv2d, X).shape)多通道输入和多通道输出


代码如下:
import tensorflow as tf
import numpy as np
print(tf.__version__)
#多通道输入
#卷积函数
def corr2d(X, K):
h, w = K.shape
if len(X.shape) <= 1:
X = tf.reshape(X, (X.shape[0],1))
Y = tf.Variable(tf.zeros((X.shape[0] - h + 1, X.shape[1] - w +1)))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j].assign(tf.cast(tf.reduce_sum(X[i:i+h, j:j+w] * K), dtype=tf.float32))
return Y
#实现含多个输入通道的互相关运算。我们只需要对每个通道做互相关运算,然后进行累加。
def corr2d_multi_in(X, K):
return tf.reduce_sum([corr2d(X[i], K[i]) for i in range(X.shape[0])],axis=0)
X = tf.constant([[[0,1,2],[3,4,5],[6,7,8]],
[[1,2,3],[4,5,6],[7,8,9]]])
K = tf.constant([[[0,1],[2,3]],
[[1,2],[3,4]]])
print(corr2d_multi_in(X, K))
![]()
import tensorflow as tf
import numpy as np
print(tf.__version__)
#多通道输入
#卷积函数
def corr2d(X, K):
h, w = K.shape
if len(X.shape) <= 1:
X = tf.reshape(X, (X.shape[0],1))
Y = tf.Variable(tf.zeros((X.shape[0] - h + 1, X.shape[1] - w +1)))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j].assign(tf.cast(tf.reduce_sum(X[i:i+h, j:j+w] * K), dtype=tf.float32))
return Y
#实现含多个输入通道的互相关运算。我们只需要对每个通道做互相关运算,然后进行累加。
def corr2d_multi_in(X, K):
return tf.reduce_sum([corr2d(X[i], K[i]) for i in range(X.shape[0])],axis=0)
X = tf.constant([[[0,1,2],[3,4,5],[6,7,8]],
[[1,2,3],[4,5,6],[7,8,9]]])
K = tf.constant([[[0,1],[2,3]],
[[1,2],[3,4]]])
print(corr2d_multi_in(X, K))
#多通道输出
def corr2d_multi_in_out(X, K):
return tf.stack([corr2d_multi_in(X, k) for k in K],axis=0)
print("K:",K)
print("K+1:",K+1)
print("K+2:",K+2)
K = tf.stack([K, K+1, K+2],axis=0)
print(K.shape)
print(corr2d_multi_in_out(X, K))
#等价于下述操作
print(corr2d_multi_in(X, K))
print(corr2d_multi_in(X, K+1))
print(corr2d_multi_in(X, K+2))
这里其实就是输入是3*3*3(代表三个输入通道*一个大小为3*3的矩阵),因为输入为3通道,所以单个卷积核为3个1*1的卷积核(例如浅蓝色为一个1*1卷积核,深蓝色代表另一个1*1的卷积核),单个卷积核采样时,对于该图生成一个3*3*3的矩阵,不过这三个矩阵会相加,所以结果时3*3的矩阵,由于有两个卷积核,所以输出2个3*3的矩阵。
实现代码如下:
import tensorflow as tf
import numpy as np
print(tf.__version__)
#多通道输入
#卷积函数
def corr2d(X, K):
h, w = K.shape
if len(X.shape) <= 1:
X = tf.reshape(X, (X.shape[0],1))
Y = tf.Variable(tf.zeros((X.shape[0] - h + 1, X.shape[1] - w +1)))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j].assign(tf.cast(tf.reduce_sum(X[i:i+h, j:j+w] * K), dtype=tf.float32))
return Y
#实现含多个输入通道的互相关运算。我们只需要对每个通道做互相关运算,然后进行累加。
def corr2d_multi_in(X, K):
return tf.reduce_sum([corr2d(X[i], K[i]) for i in range(X.shape[0])],axis=0)
X = tf.constant([[[0,1,2],[3,4,5],[6,7,8]],
[[1,2,3],[4,5,6],[7,8,9]]])
K = tf.constant([[[0,1],[2,3]],
[[1,2],[3,4]]])
#多通道输出
def corr2d_multi_in_out(X, K):
return tf.stack([corr2d_multi_in(X, k) for k in K],axis=0)
#1*1卷积核
def corr2d_multi_in_out_1x1(X, K):
c_i, h, w = X.shape
c_o = K.shape[0]
X = tf.reshape(X,(c_i, h * w))
K = tf.reshape(K,(c_o, c_i))
Y = tf.matmul(K, X)
return tf.reshape(Y, (c_o, h, w))
X = tf.random.uniform((3,3,3))
K = tf.random.uniform((2,3,1,1))
Y1 = corr2d_multi_in_out_1x1(X, K)
Y2 = corr2d_multi_in_out(X, K)
print(tf.norm(Y1-Y2) < 1e-6)
小结:
1*1卷积层可以调整通道数,例如上面样例,将3通道3*3的矩阵变化为2通道3*3的矩阵;在某种意义上,将通道维当作特征维,高宽上的数据当作样本数据,1*1卷积层与全连接层等价。
池化

验证代码:
import tensorflow as tf
import numpy as np
print(tf.__version__)
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = tf.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w +1))
Y = tf.Variable(Y)
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
#最大池化
if mode == 'max':
Y[i,j].assign(tf.reduce_max(X[i:i+p_h, j:j+p_w]))
#平均池化
elif mode =='avg':
Y[i,j].assign(tf.reduce_mean(X[i:i+p_h, j:j+p_w]))
return Y
#图示验证
X = tf.constant([[0,1,2],[3,4,5],[6,7,8]],dtype=tf.float32)
print(pool2d(X, (2,2)))
#物体边缘检测
X = tf.Variable(tf.ones((6,8)))
X[:, 2:6].assign(tf.zeros(X[:,2:6].shape))
print(pool2d(X, (2,2)))
结果:

填充和步频:

tensorflow默认数据类型为'channels_last',所以这里使用(1,4,4,1)而不是(1,1,4,4)
验证代码:
import tensorflow as tf
import numpy as np
print(tf.__version__)
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = tf.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w +1))
Y = tf.Variable(Y)
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
#最大池化
if mode == 'max':
Y[i,j].assign(tf.reduce_max(X[i:i+p_h, j:j+p_w]))
#平均池化
elif mode =='avg':
Y[i,j].assign(tf.reduce_mean(X[i:i+p_h, j:j+p_w]))
return Y
#tensorflow default data_format == 'channels_last'
#so (1,4,4,1) instead of (1,1,4,4)
X = tf.reshape(tf.constant(range(16)), (1,4,4,1))
print(X)
#当步幅过大时会填充
#默认情况下,MaxPool2D实例里步幅和池化窗口形状相同
pool2d = tf.keras.layers.MaxPool2D(pool_size=[3,3])
print(pool2d(X))
#步幅为2
pool2d = tf.keras.layers.MaxPool2D(pool_size=[3,3],padding='same',strides=2)
print(pool2d(X))多通道输入和输出
![]()
关键是记住多通道的池化,其实就是分别池化,没有卷积的求和,就行了。
2*4*4*1的池化过程中仅仅4*4的维度发生变化,变成n*n
验证代码:
import tensorflow as tf
import numpy as np
print(tf.__version__)
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = tf.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w +1))
Y = tf.Variable(Y)
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
#最大池化
if mode == 'max':
Y[i,j].assign(tf.reduce_max(X[i:i+p_h, j:j+p_w]))
#平均池化
elif mode =='avg':
Y[i,j].assign(tf.reduce_mean(X[i:i+p_h, j:j+p_w]))
return Y
X = tf.reshape(tf.constant(range(16)), (1,4,4,1))
#多通道
X = tf.stack([X, X+1], axis=3)
X = tf.reshape(X, (2,4,4,1))
print(X.shape)
pool2d = tf.keras.layers.MaxPool2D(3, padding='same', strides=2)
print(pool2d(X))
上述验证程序,池化后维度为(2, 2, 2, 1)
小结:
- 最大池化和平均池化分别取池化窗口中输入元素的最大值和平均值作为输出。
- 池化层的一个主要作用是缓解卷积层对位置的过度敏感性。
- 可以指定池化层的填充和步幅。
- 池化层的输出通道数跟输入通道数相同。
上述将卷积神经网络的基础都介绍完了,下面开始针对具体的卷积神经网络来进行介绍了~
卷积神经网络(LeNet)

LeNet模型

实现代码·如下:
import tensorflow as tf
import numpy as np
print(tf.__version__)
#定义模型
net = tf.keras.models.Sequential([
tf.keras.layers.Conv2D(filters=6,kernel_size=5,activation='sigmoid',input_shape=(28,28,1)),
tf.keras.layers.MaxPool2D(pool_size=2, strides=2),
tf.keras.layers.Conv2D(filters=16,kernel_size=5,activation='sigmoid'),
tf.keras.layers.MaxPool2D(pool_size=2, strides=2),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(120,activation='sigmoid'),
tf.keras.layers.Dense(84,activation='sigmoid'),
tf.keras.layers.Dense(10,activation='sigmoid')
])
#构造一个单通道28*28的样本
X = tf.random.uniform((1,28,28,1))
#逐层进行前向计算来查看每个层的输出形状
for layer in net.layers:
X = layer(X)
print(layer.name, 'output shape\t', X.shape)
#在卷积层块中输入的高和宽在逐层减小。
# 卷积层由于使用高和宽均为5的卷积核,从而将高和宽分别减小4,而池化层则将高和宽减半,但通道数则从1增加到16。
#最后将数据展成1维,由全连接层则逐层减少输出个数,直到变成图像的类别数10。
#获取数据集
fashion_mnist = tf.keras.datasets.fashion_mnist
(train_images, train_labels), (test_images, test_labels) = fashion_mnist.load_data()
#查看数据集形状
print(train_images.shape)
#print(train_labels.shape)
print(test_images.shape)
#将数据集合改变形状,其实就是增加通道数
train_images = tf.reshape(train_images, (train_images.shape[0],train_images.shape[1],train_images.shape[2], 1))
print(train_images.shape)
test_images = tf.reshape(test_images, (test_images.shape[0],test_images.shape[1],test_images.shape[2], 1))
print(test_images.shape)
#定义模型损失函数、优化器等
optimizer = tf.keras.optimizers.SGD(learning_rate=0.9, momentum=0.0, nesterov=False)
net.compile(optimizer=optimizer,
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
#训练函数
net.fit(train_images, train_labels, epochs=5, validation_split=0.1)
小结:
- 卷积神经网络就是含卷积层的网络。
- LeNet交替使用卷积层和最大池化层后接全连接层来进行图像分类。
深度卷积神经网络(AlexNet)

学习特征表示



下面我们实现稍微简化过的AlexNet
import tensorflow as tf
import numpy as np
print(tf.__version__)
#使用gpu
# for gpu in tf.config.experimental.list_physical_devices('GPU'):
# tf.config.experimental.set_memory_growth(gpu, True)
#定义模型
net = tf.keras.models.Sequential([
tf.keras.layers.Conv2D(filters=96,kernel_size=11,strides=4,activation='relu'),
tf.keras.layers.MaxPool2D(pool_size=3, strides=2),
tf.keras.layers.Conv2D(filters=256,kernel_size=5,padding='same',activation='relu'),
tf.keras.layers.MaxPool2D(pool_size=3, strides=2),
tf.keras.layers.Conv2D(filters=384,kernel_size=3,padding='same',activation='relu'),
tf.keras.layers.Conv2D(filters=384,kernel_size=3,padding='same',activation='relu'),
tf.keras.layers.Conv2D(filters=256,kernel_size=3,padding='same',activation='relu'),
tf.keras.layers.MaxPool2D(pool_size=3, strides=2),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(4096,activation='relu'),
tf.keras.layers.Dropout(0.5),
tf.keras.layers.Dense(4096,activation='relu'),
tf.keras.layers.Dropout(0.5),
tf.keras.layers.Dense(10,activation='sigmoid')
])
#随机定义一个矩阵
X = tf.random.uniform((1,224,224,1))
#观察每层结构
for layer in net.layers:
X = layer(X)
print(layer.name, 'output shape\t', X.shape)
#加载数据集
#虽然论文中AlexNet使用ImageNet数据集,但因为ImageNet数据集训练时间较长,我们仍用前面的Fashion-MNIST数据集来演示AlexNet。
# 读取数据的时候我们额外做了一步将图像高和宽扩大到AlexNet使用的图像高和宽224。这个可以通过tf.image.resize_with_pad来实现。
class DataLoader():
def __init__(self):
fashion_mnist = tf.keras.datasets.fashion_mnist
(self.train_images, self.train_labels), (self.test_images, self.test_labels) = fashion_mnist.load_data()
self.train_images = np.expand_dims(self.train_images.astype(np.float32)/255.0,axis=-1)
self.test_images = np.expand_dims(self.test_images.astype(np.float32)/255.0,axis=-1)
self.train_labels = self.train_labels.astype(np.int32)
self.test_labels = self.test_labels.astype(np.int32)
self.num_train, self.num_test = self.train_images.shape[0], self.test_images.shape[0]
def get_batch_train(self, batch_size):
index = np.random.randint(0, np.shape(self.train_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.train_images[index],224,224,)
return resized_images.numpy(), self.train_labels[index]
def get_batch_test(self, batch_size):
index = np.random.randint(0, np.shape(self.test_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.test_images[index],224,224,)
return resized_images.numpy(), self.test_labels[index]
batch_size = 128
dataLoader = DataLoader()
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
print("x_batch shape:",x_batch.shape,"y_batch shape:", y_batch.shape)
#训练
def train_alexnet():
epoch = 5
num_iter = dataLoader.num_train//batch_size
for e in range(epoch):
for n in range(num_iter):
print("轮:", e," 第",n,"/",num_iter,"次")
#每次随机选取128个样本进行训练
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
net.fit(x_batch, y_batch)
if n%20 == 0:
net.save_weights("AlexNet.h5")
optimizer = tf.keras.optimizers.SGD(learning_rate=0.01, momentum=0.0, nesterov=False)
net.compile(optimizer=optimizer,
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
#x训练一次
#net.fit(x_batch, y_batch)
print("---------------------")
#边训练边保存
train_alexnet()
net.load_weights("AlexNet.h5")
x_test, y_test = dataLoader.get_batch_test(2000)
net.evaluate(x_test, y_test, verbose=2)
小结:
- AlexNet跟LeNet结构类似,但使用了更多的卷积层和更大的参数空间来拟合大规模数据集ImageNet。它是浅层神经网络和深度神经网络的分界线。
- 虽然看上去AlexNet的实现比LeNet的实现也就多了几行代码而已,但这个观念上的转变和真正优秀实验结果的产生令学术界付出了很多年。
使用重复元素的网络(VGG)

主要分为VGG块和VGG网络搭建。
VGG块

VGG网络

(除了VGG-11外还有许多其他VGG网络,如果有兴趣可以去研究一下)
具体代码实现如下:
import tensorflow as tf
print(tf.__version__)
for gpu in tf.config.experimental.list_physical_devices('GPU'):
tf.config.experimental.set_memory_growth(gpu, True)
#VGG块
def vgg_block(num_convs, num_channels):
blk = tf.keras.models.Sequential()
for _ in range(num_convs):
blk.add(tf.keras.layers.Conv2D(num_channels,kernel_size=3,
padding='same',activation='relu'))
blk.add(tf.keras.layers.MaxPool2D(pool_size=2, strides=2))
return blk
#需要定义的网络
conv_arch = ((1, 64), (1, 128), (2, 256), (2, 512), (2, 512))
#实现VGG-11网络
def vgg(conv_arch):
net = tf.keras.models.Sequential()
for (num_convs, num_channels) in conv_arch:
net.add(vgg_block(num_convs,num_channels))
net.add(tf.keras.models.Sequential([tf.keras.layers.Flatten(),
tf.keras.layers.Dense(4096,activation='relu'),
tf.keras.layers.Dropout(0.5),
tf.keras.layers.Dense(4096,activation='relu'),
tf.keras.layers.Dropout(0.5),
tf.keras.layers.Dense(10,activation='sigmoid')]))
return net
net = vgg(conv_arch)
#因为VGG-11计算上比AlexNet更加复杂,出于测试的目的我们构造一个通道数更小,或者说更窄的网络在Fashion-MNIST数据集上进行训练。
ratio = 4
#缩减四倍
small_conv_arch = [(pair[0], pair[1] // ratio) for pair in conv_arch]
print("small_conv_arch:",small_conv_arch)
#降为[(1, 16), (1, 32), (2, 64), (2, 128), (2, 128)]
net = vgg(small_conv_arch)
import numpy as np
#获取数据
class DataLoader():
def __init__(self):
fashion_mnist = tf.keras.datasets.fashion_mnist
(self.train_images, self.train_labels), (self.test_images, self.test_labels) = fashion_mnist.load_data()
self.train_images = np.expand_dims(self.train_images.astype(np.float32)/255.0,axis=-1)
self.test_images = np.expand_dims(self.test_images.astype(np.float32)/255.0,axis=-1)
self.train_labels = self.train_labels.astype(np.int32)
self.test_labels = self.test_labels.astype(np.int32)
self.num_train, self.num_test = self.train_images.shape[0], self.test_images.shape[0]
def get_batch_train(self, batch_size):
index = np.random.randint(0, np.shape(self.train_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.train_images[index],224,224,)
return resized_images.numpy(), self.train_labels[index]
def get_batch_test(self, batch_size):
index = np.random.randint(0, np.shape(self.test_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.test_images[index],224,224,)
return resized_images.numpy(), self.test_labels[index]
batch_size = 128
dataLoader = DataLoader()
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
print("x_batch shape:",x_batch.shape,"y_batch shape:", y_batch.shape)
def train_vgg():
epoch = 5
num_iter = dataLoader.num_train//batch_size
for e in range(epoch):
for n in range(num_iter):
print("轮:", e, " 第", n, "/", num_iter, "次")
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
net.fit(x_batch, y_batch)
if n%20 == 0:
net.save_weights("VGG.h5")
optimizer = tf.keras.optimizers.SGD(learning_rate=0.05, momentum=0.0, nesterov=False)
net.compile(optimizer=optimizer,
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
#net.fit(x_batch, y_batch)
train_vgg()
#读取参数并预测
net.load_weights("VGG.h5")
x_test, y_test = dataLoader.get_batch_test(2000)
net.evaluate(x_test, y_test, verbose=2)
小结:
- VGG-11通过5个可以重复使用的卷积块来构造网络。根据每块里卷积层个数和输出通道数的不同可以定义出不同的VGG模型。
网络中的网络(NiN)

主要也是有两部分构成,NiN块和NiN网络。
NiN块
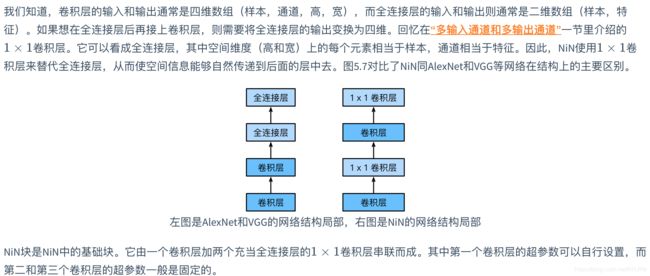
NiN网络

代码实现如下:
import tensorflow as tf
print(tf.__version__)
for gpu in tf.config.experimental.list_physical_devices('GPU'):
tf.config.experimental.set_memory_growth(gpu, True)
#NiN块
def nin_block(num_channels, kernel_size, strides, padding):
blk = tf.keras.models.Sequential()
blk.add(tf.keras.layers.Conv2D(num_channels, kernel_size,
strides=strides, padding=padding, activation='relu'))
blk.add(tf.keras.layers.Conv2D(num_channels, kernel_size=1,activation='relu'))
blk.add(tf.keras.layers.Conv2D(num_channels, kernel_size=1,activation='relu'))
return blk
#NiN模型
def NiN():
net = tf.keras.models.Sequential()
net.add(nin_block(96, kernel_size=11, strides=4, padding='valid'))
net.add(tf.keras.layers.MaxPool2D(pool_size=3, strides=2))
net.add(nin_block(256, kernel_size=5, strides=1, padding='same'))
net.add(tf.keras.layers.MaxPool2D(pool_size=3, strides=2))
net.add(nin_block(384, kernel_size=3, strides=1, padding='same'))
net.add(tf.keras.layers.MaxPool2D(pool_size=3, strides=2))
net.add(tf.keras.layers.Dropout(0.5))
net.add(nin_block(10, kernel_size=3, strides=1, padding='same'))
net.add(tf.keras.layers.GlobalAveragePooling2D())
net.add(tf.keras.layers.Flatten())
return net
net=NiN()
#构造一个高和宽均为224的单通道数据样本来观察每一层的输出形状
X = tf.random.uniform((1,224,224,1))
for blk in net.layers:
X = blk(X)
print(blk.name, 'output shape:\t', X.shape)
#获取数据
import numpy as np
class DataLoader():
def __init__(self):
fashion_mnist = tf.keras.datasets.fashion_mnist
(self.train_images, self.train_labels), (self.test_images, self.test_labels) = fashion_mnist.load_data()
self.train_images = np.expand_dims(self.train_images.astype(np.float32)/255.0,axis=-1)
self.test_images = np.expand_dims(self.test_images.astype(np.float32)/255.0,axis=-1)
self.train_labels = self.train_labels.astype(np.int32)
self.test_labels = self.test_labels.astype(np.int32)
self.num_train, self.num_test = self.train_images.shape[0], self.test_images.shape[0]
def get_batch_train(self, batch_size):
index = np.random.randint(0, np.shape(self.train_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.train_images[index],224,224,)
return resized_images.numpy(), self.train_labels[index]
def get_batch_test(self, batch_size):
index = np.random.randint(0, np.shape(self.test_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.test_images[index],224,224,)
return resized_images.numpy(), self.test_labels[index]
batch_size = 128
dataLoader = DataLoader()
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
print("x_batch shape:",x_batch.shape,"y_batch shape:", y_batch.shape)
#训练
def train_nin():
#net.load_weights("NiN.h5")
epoch = 5
num_iter = dataLoader.num_train//batch_size
for e in range(epoch):
for n in range(num_iter):
print("轮:", e, " 第", n, "/", num_iter, "次")
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
net.fit(x_batch, y_batch)
if n%20 == 0:
net.save_weights("NiN.h5")
# optimizer = tf.keras.optimizers.SGD(learning_rate=0.06, momentum=0.3, nesterov=False)
optimizer = tf.keras.optimizers.Adam(lr=1e-7)
net.compile(optimizer=optimizer,
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
#net.fit(x_batch, y_batch)
train_nin()
#加载+预测
net.load_weights("NiN.h5")
x_test, y_test = dataLoader.get_batch_test(2000)
net.evaluate(x_test, y_test, verbose=2)
含并行连结的网络(GoogLeNet)

其主要内容也是块和网络,不过与前面的几个模型的命名方式不太一样哟。
Inception 块

GoogLeNet模型
![]()
![]()




GoogLeNet模型的计算复杂,而且不如VGG那样便于修改通道数。
最终代码如下:
import tensorflow as tf
print(tf.__version__)
for gpu in tf.config.experimental.list_physical_devices('GPU'):
tf.config.experimental.set_memory_growth(gpu, True)
#定义Inception块
class Inception(tf.keras.layers.Layer):
def __init__(self,c1, c2, c3, c4):
super().__init__()
# 线路1,单1 x 1卷积层
self.p1_1 = tf.keras.layers.Conv2D(c1, kernel_size=1, activation='relu', padding='same')
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = tf.keras.layers.Conv2D(c2[0], kernel_size=1, padding='same', activation='relu')
self.p2_2 = tf.keras.layers.Conv2D(c2[1], kernel_size=3, padding='same',
activation='relu')
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = tf.keras.layers.Conv2D(c3[0], kernel_size=1, padding='same', activation='relu')
self.p3_2 = tf.keras.layers.Conv2D(c3[1], kernel_size=5, padding='same',
activation='relu')
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = tf.keras.layers.MaxPool2D(pool_size=3, padding='same', strides=1)
self.p4_2 = tf.keras.layers.Conv2D(c4, kernel_size=1, padding='same', activation='relu')
def call(self, x):
p1 = self.p1_1(x)
p2 = self.p2_2(self.p2_1(x))
p3 = self.p3_2(self.p3_1(x))
p4 = self.p4_2(self.p4_1(x))
return tf.concat([p1, p2, p3, p4], axis=-1) # 在通道维上连结输出
#进行模拟
Inception(64, (96, 128), (16, 32), 32)
#第一模块
b1 = tf.keras.models.Sequential()
b1.add(tf.keras.layers.Conv2D(64, kernel_size=7, strides=2, padding='same', activation='relu'))
b1.add(tf.keras.layers.MaxPool2D(pool_size=3, strides=2, padding='same'))
#第二模块
b2 = tf.keras.models.Sequential()
b2.add(tf.keras.layers.Conv2D(64, kernel_size=1, padding='same', activation='relu'))
b2.add(tf.keras.layers.Conv2D(192, kernel_size=3, padding='same', activation='relu'))
b2.add(tf.keras.layers.MaxPool2D(pool_size=3, strides=2, padding='same'))
#第三模块
b3 = tf.keras.models.Sequential()
b3.add(Inception(64, (96, 128), (16, 32), 32))
b3.add(Inception(128, (128, 192), (32, 96), 64))
b3.add(tf.keras.layers.MaxPool2D(pool_size=3, strides=2, padding='same'))
#第四模块
b4 = tf.keras.models.Sequential()
b4.add(Inception(192, (96, 208), (16, 48), 64))
b4.add(Inception(160, (112, 224), (24, 64), 64))
b4.add(Inception(128, (128, 256), (24, 64), 64))
b4.add(Inception(112, (144, 288), (32, 64), 64))
b4.add(Inception(256, (160, 320), (32, 128), 128))
b4.add(tf.keras.layers.MaxPool2D(pool_size=3, strides=2, padding='same'))
#第五模块
b5 = tf.keras.models.Sequential()
b5.add(Inception(256, (160, 320), (32, 128), 128))
b5.add(Inception(384, (192, 384), (48, 128), 128))
b5.add(tf.keras.layers.GlobalAvgPool2D())
#合并
net = tf.keras.models.Sequential([b1, b2, b3, b4, b5, tf.keras.layers.Dense(10)])
#演示数据,查看结构
X = tf.random.uniform(shape=(1, 96, 96, 1))
for layer in net.layers:
X = layer(X)
print(layer.name, 'output shape:\t', X.shape)
#获取数据
import numpy as np
class DataLoader():
def __init__(self):
fashion_mnist = tf.keras.datasets.fashion_mnist
(self.train_images, self.train_labels), (self.test_images, self.test_labels) = fashion_mnist.load_data()
self.train_images = np.expand_dims(self.train_images.astype(np.float32)/255.0,axis=-1)
self.test_images = np.expand_dims(self.test_images.astype(np.float32)/255.0,axis=-1)
self.train_labels = self.train_labels.astype(np.int32)
self.test_labels = self.test_labels.astype(np.int32)
self.num_train, self.num_test = self.train_images.shape[0], self.test_images.shape[0]
def get_batch_train(self, batch_size):
index = np.random.randint(0, np.shape(self.train_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.train_images[index],224,224,)
return resized_images.numpy(), self.train_labels[index]
def get_batch_test(self, batch_size):
index = np.random.randint(0, np.shape(self.test_images)[0], batch_size)
#need to resize images to (224,224)
resized_images = tf.image.resize_with_pad(self.test_images[index],224,224,)
return resized_images.numpy(), self.test_labels[index]
batch_size = 128
dataLoader = DataLoader()
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
print("x_batch shape:",x_batch.shape,"y_batch shape:", y_batch.shape)
#训练模型
def train_googlenet():
#net.load_weights("GoogLeNet.h5")
epoch = 5
num_iter = dataLoader.num_train//batch_size
for e in range(epoch):
for n in range(num_iter):
print("轮:", e, " 第", n, "/", num_iter, "次")
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
net.fit(x_batch, y_batch)
if n%20 == 0:
net.save_weights("GoogLeNet.h5")
# optimizer = tf.keras.optimizers.SGD(learning_rate=0.05, momentum=0.0, nesterov=False)
optimizer = tf.keras.optimizers.Adam(lr=1e-7)
net.compile(optimizer=optimizer,
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
x_batch, y_batch = dataLoader.get_batch_train(batch_size)
#net.fit(x_batch, y_batch)
train_googlenet()
#加载模型+预测
net.load_weights("GoogLeNet.h5")
x_test, y_test = dataLoader.get_batch_test(2000)
net.evaluate(x_test, y_test, verbose=2)
小结:
- Inception块相当于一个有4条线路的子网络。它通过不同窗口形状的卷积层和最大池化层来并行抽取信息,并使用1×11×11×1卷积层减少通道数从而降低模型复杂度。
- GoogLeNet将多个设计精细的Inception块和其他层串联起来。其中Inception块的通道数分配之比是在ImageNet数据集上通过大量的实验得来的。
- GoogLeNet和它的后继者们一度是ImageNet上最高效的模型之一:在类似的测试精度下,它们的计算复杂度往往更低。
批量归一化
 对全连接层和卷积层做批量归一化的方法稍有不同。下面我们将分别介绍这两种情况下的批量归一化。
对全连接层和卷积层做批量归一化的方法稍有不同。下面我们将分别介绍这两种情况下的批量归一化。
对全连接层做批量归一化

对卷积层做批量归一化

预测时的批量归一化

从零实现归一化(LeNet)
import tensorflow as tf
import numpy as np
def batch_norm(is_training,X, gamma, beta, moving_mean, moving_var, eps, momentum):
# 判断是当前模式是训练模式还是预测模式
if not is_training:
# 如果是在预测模式下,直接使用传入的移动平均所得的均值和方差
X_hat = (X - moving_mean) / np.sqrt(moving_var + eps)
else:
assert len(X.shape) in (2, 4)
if len(X.shape) == 2:
# 使用全连接层的情况,计算特征维上的均值和方差
mean = X.mean(axis=0)
var = ((X - mean) ** 2).mean(axis=0)
else:
# 使用二维卷积层的情况,计算通道维上(axis=1)的均值和方差。这里我们需要保持
# X的形状以便后面可以做广播运算
mean = X.mean(axis=(0, 2, 3), keepdims=True)
var = ((X - mean) ** 2).mean(axis=(0, 2, 3), keepdims=True)
# 训练模式下用当前的均值和方差做标准化
X_hat = (X - mean) / np.sqrt(var + eps)
# 更新移动平均的均值和方差
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta # 拉伸和偏移
return Y, moving_mean, moving_var
#自定义一个BatchNorm层。它保存参与求梯度和迭代的拉伸参数gamma和偏移参数beta,同时也维护移动平均得到的均值和方差,以便能够在模型预测时被使用。
# BatchNorm实例所需指定的num_features参数对于全连接层来说应为输出个数,对于卷积层来说则为输出通道数。该实例所需指定的num_dims参数对于全连接层和卷积层来说分别为2和4。
class BatchNormalization(tf.keras.layers.Layer):
def __init__(self, decay=0.9, epsilon=1e-5, **kwargs):
self.decay = decay
self.epsilon = epsilon
super(BatchNormalization, self).__init__(**kwargs)
def build(self, input_shape):
self.gamma = self.add_weight(name='gamma',
shape=[input_shape[-1], ],
initializer=tf.initializers.ones,
trainable=True)
self.beta = self.add_weight(name='beta',
shape=[input_shape[-1], ],
initializer=tf.initializers.zeros,
trainable=True)
self.moving_mean = self.add_weight(name='moving_mean',
shape=[input_shape[-1], ],
initializer=tf.initializers.zeros,
trainable=False)
self.moving_variance = self.add_weight(name='moving_variance',
shape=[input_shape[-1], ],
initializer=tf.initializers.ones,
trainable=False)
super(BatchNormalization, self).build(input_shape)
def assign_moving_average(self, variable, value):
"""
variable = variable * decay + value * (1 - decay)
"""
delta = variable * self.decay + value * (1 - self.decay)
return variable.assign(delta)
@tf.function
def call(self, inputs, training):
if training:
batch_mean, batch_variance = tf.nn.moments(inputs, list(range(len(inputs.shape) - 1)))
mean_update = self.assign_moving_average(self.moving_mean, batch_mean)
variance_update = self.assign_moving_average(self.moving_variance, batch_variance)
self.add_update(mean_update)
self.add_update(variance_update)
mean, variance = batch_mean, batch_variance
else:
mean, variance = self.moving_mean, self.moving_variance
output = tf.nn.batch_normalization(inputs,
mean=mean,
variance=variance,
offset=self.beta,
scale=self.gamma,
variance_epsilon=self.epsilon)
return output
def compute_output_shape(self, input_shape):
return input_shape
#定义网络LeNet
net = tf.keras.models.Sequential(
[tf.keras.layers.Conv2D(filters=6,kernel_size=5),
BatchNormalization(),
tf.keras.layers.Activation('sigmoid'),
tf.keras.layers.MaxPool2D(pool_size=2, strides=2),
tf.keras.layers.Conv2D(filters=16,kernel_size=5),
BatchNormalization(),
tf.keras.layers.Activation('sigmoid'),
tf.keras.layers.MaxPool2D(pool_size=2, strides=2),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(120),
BatchNormalization(),
tf.keras.layers.Activation('sigmoid'),
tf.keras.layers.Dense(84),
BatchNormalization(),
tf.keras.layers.Activation('sigmoid'),
tf.keras.layers.Dense(10,activation='sigmoid')]
)
#获取数据+训练数据
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.mnist.load_data()
x_train = x_train.reshape((60000, 28, 28, 1)).astype('float32') / 255
x_test = x_test.reshape((10000, 28, 28, 1)).astype('float32') / 255
net.compile(loss='sparse_categorical_crossentropy',
optimizer=tf.keras.optimizers.RMSprop(),
metrics=['accuracy'])
history = net.fit(x_train, y_train,
batch_size=64,
epochs=5,
validation_split=0.2)
test_scores = net.evaluate(x_test, y_test, verbose=2)
print('Test loss:', test_scores[0])
print('Test accuracy:', test_scores[1])
#查看第一个批量归一化层学习到的拉伸参数gamma和偏移参数beta
print(net.get_layer(index=1).gamma,net.get_layer(index=1).beta)
归一化的简单实现
import tensorflow as tf
import numpy as np
#定义模型
net = tf.keras.models.Sequential()
net.add(tf.keras.layers.Conv2D(filters=6,kernel_size=5))
net.add(tf.keras.layers.BatchNormalization())
net.add(tf.keras.layers.Activation('sigmoid'))
net.add(tf.keras.layers.MaxPool2D(pool_size=2, strides=2))
net.add(tf.keras.layers.Conv2D(filters=16,kernel_size=5))
net.add(tf.keras.layers.BatchNormalization())
net.add(tf.keras.layers.Activation('sigmoid'))
net.add(tf.keras.layers.MaxPool2D(pool_size=2, strides=2))
net.add(tf.keras.layers.Flatten())
net.add(tf.keras.layers.Dense(120))
net.add(tf.keras.layers.BatchNormalization())
net.add(tf.keras.layers.Activation('sigmoid'))
net.add(tf.keras.layers.Dense(84))
net.add(tf.keras.layers.BatchNormalization())
net.add(tf.keras.layers.Activation('sigmoid'))
net.add(tf.keras.layers.Dense(10,activation='sigmoid'))
#获取数据+训练
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.mnist.load_data()
x_train = x_train.reshape((60000, 28, 28, 1)).astype('float32') / 255
x_test = x_test.reshape((10000, 28, 28, 1)).astype('float32') / 255
net.compile(loss='sparse_categorical_crossentropy',
optimizer=tf.keras.optimizers.RMSprop(),
metrics=['accuracy'])
history = net.fit(x_train, y_train,
batch_size=64,
epochs=5,
validation_split=0.2)
test_scores = net.evaluate(x_test, y_test, verbose=2)
print('Test loss:', test_scores[0])
print('Test accuracy:', test_scores[1])
小结:
- 在模型训练时,批量归一化利用小批量上的均值和标准差,不断调整神经网络的中间输出,从而使整个神经网络在各层的中间输出的数值更稳定。
- 对全连接层和卷积层做批量归一化的方法稍有不同。
- 批量归一化层和丢弃层一样,在训练模式和预测模式的计算结果是不一样的。
- keras提供的BatchNorm类使用起来简单、方便。(最好选择简单实现)
残差网络(ResNet)

残差神经网络也有由残差块和ResNet网络完成的。
残差块

ResNet网络
![]()
具体实现代码:
import tensorflow as tf
from tensorflow.keras import layers,activations
#定义残差块
class Residual(tf.keras.Model):
def __init__(self, num_channels, use_1x1conv=False, strides=1, **kwargs):
super(Residual, self).__init__(**kwargs)
self.conv1 = layers.Conv2D(num_channels,
padding='same',
kernel_size=3,
strides=strides)
self.conv2 = layers.Conv2D(num_channels, kernel_size=3,padding='same')
if use_1x1conv:
self.conv3 = layers.Conv2D(num_channels,
kernel_size=1,
strides=strides)
else:
self.conv3 = None
self.bn1 = layers.BatchNormalization()
self.bn2 = layers.BatchNormalization()
def call(self, X):
Y = activations.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return activations.relu(Y + X)
#查看输入和输出形状一致的情况
blk = Residual(3)
#tensorflow input shpe (n_images, x_shape, y_shape, channels).
#mxnet.gluon.nn.conv_layers (batch_size, in_channels, height, width)
X = tf.random.uniform((4, 6, 6 , 3))
blk(X).shape#TensorShape([4, 6, 6, 3])
#也可以在增加输出通道数的同时减半输出的高和宽
blk = Residual(6, use_1x1conv=True, strides=2)
blk(X).shape
#TensorShape([4, 3, 3, 6])
#ResNet模型
#ResNet的前两层跟之前介绍的GoogLeNet中的一样:在输出通道数为64、步幅为2的7×7卷积层后接步幅为2的3×3的最大池化层。
# 不同之处在于ResNet每个卷积层后增加的批量归一化层
net = tf.keras.models.Sequential(
[layers.Conv2D(64, kernel_size=7, strides=2, padding='same'),
layers.BatchNormalization(), layers.Activation('relu'),
layers.MaxPool2D(pool_size=3, strides=2, padding='same')])
#一个模块的通道数同输入通道数一致。由于之前已经使用了步幅为2的最大池化层,所以无须减小高和宽。
# 之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
class ResnetBlock(tf.keras.layers.Layer):
def __init__(self,num_channels, num_residuals, first_block=False,**kwargs):
super(ResnetBlock, self).__init__(**kwargs)
self.listLayers=[]
for i in range(num_residuals):
if i == 0 and not first_block:
self.listLayers.append(Residual(num_channels, use_1x1conv=True, strides=2))
else:
self.listLayers.append(Residual(num_channels))
def call(self, X):
for layer in self.listLayers.layers:
X = layer(X)
return X
#为ResNet加入所有残差块。这里每个模块使用两个残差块。
class ResNet(tf.keras.Model):
def __init__(self,num_blocks,**kwargs):
super(ResNet, self).__init__(**kwargs)
self.conv=layers.Conv2D(64, kernel_size=7, strides=2, padding='same')
self.bn=layers.BatchNormalization()
self.relu=layers.Activation('relu')
self.mp=layers.MaxPool2D(pool_size=3, strides=2, padding='same')
self.resnet_block1=ResnetBlock(64,num_blocks[0], first_block=True)
self.resnet_block2=ResnetBlock(128,num_blocks[1])
self.resnet_block3=ResnetBlock(256,num_blocks[2])
self.resnet_block4=ResnetBlock(512,num_blocks[3])
self.gap=layers.GlobalAvgPool2D()
self.fc=layers.Dense(units=10,activation=tf.keras.activations.softmax)
def call(self, x):
x=self.conv(x)
x=self.bn(x)
x=self.relu(x)
x=self.mp(x)
x=self.resnet_block1(x)
x=self.resnet_block2(x)
x=self.resnet_block3(x)
x=self.resnet_block4(x)
x=self.gap(x)
x=self.fc(x)
return x
mynet=ResNet([2,2,2,2])
#这里每个模块里有4个卷积层(不计算 1×1卷积层),加上最开始的卷积层和最后的全连接层,共计18层。
# 这个模型通常也被称为ResNet-18。
# 通过配置不同的通道数和模块里的残差块数可以得到不同的ResNet模型,例如更深的含152层的ResNet-152。
# 虽然ResNet的主体架构跟GoogLeNet的类似,但ResNet结构更简单,修改也更方便。
# 这些因素都导致了ResNet迅速被广泛使用。
# 在训练ResNet之前,我们来观察一下输入形状在ResNet不同模块之间的变化。
X = tf.random.uniform(shape=(1, 224, 224 , 1))
for layer in mynet.layers:
X = layer(X)
print(layer.name, 'output shape:\t', X.shape)
#获取数据集,Fashion-MNIST数据集上训练ResNet
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.fashion_mnist.load_data()
x_train = x_train.reshape((60000, 28, 28, 1)).astype('float32') / 255
x_test = x_test.reshape((10000, 28, 28, 1)).astype('float32') / 255
mynet.compile(loss='sparse_categorical_crossentropy',
optimizer=tf.keras.optimizers.Adam(),
metrics=['accuracy'])
history = mynet.fit(x_train, y_train,
batch_size=64,
epochs=5,
validation_split=0.2)
test_scores = mynet.evaluate(x_test, y_test, verbose=2)
小结:
- 残差块通过跨层的数据通道从而能够训练出有效的深度神经网络。
- ResNet深刻影响了后来的深度神经网络的设计。
稠密连接网络(DenseNet)

稠密块
![]()
![]()
过渡层
![]()
![]()
DenseNet网络


代码实现如下:
import tensorflow as tf
class BottleNeck(tf.keras.layers.Layer):
def __init__(self, growth_rate, drop_rate):
super(BottleNeck, self).__init__()
self.bn1 = tf.keras.layers.BatchNormalization()
self.conv1 = tf.keras.layers.Conv2D(filters=4 * growth_rate,
kernel_size=(1, 1),
strides=1,
padding="same")
self.bn2 = tf.keras.layers.BatchNormalization()
self.conv2 = tf.keras.layers.Conv2D(filters=growth_rate,
kernel_size=(3, 3),
strides=1,
padding="same")
self.dropout = tf.keras.layers.Dropout(rate=drop_rate)
self.listLayers = [self.bn1,
tf.keras.layers.Activation("relu"),
self.conv1,
self.bn2,
tf.keras.layers.Activation("relu"),
self.conv2,
self.dropout]
def call(self, x):
y = x
for layer in self.listLayers.layers:
y = layer(y)
y = tf.keras.layers.concatenate([x,y], axis=-1)
return y
class DenseBlock(tf.keras.layers.Layer):
def __init__(self, num_layers, growth_rate, drop_rate=0.5):
super(DenseBlock, self).__init__()
self.num_layers = num_layers
self.growth_rate = growth_rate
self.drop_rate = drop_rate
self.listLayers = []
for _ in range(num_layers):
self.listLayers.append(BottleNeck(growth_rate=self.growth_rate, drop_rate=self.drop_rate))
def call(self, x):
for layer in self.listLayers.layers:
x = layer(x)
return x
#定义一个有2个输出通道数为10的卷积块。使用通道数为3的输入时,我们会得到通道数为3+2×10=23的输出。
#卷积块的通道数控制了输出通道数相对于输入通道数的增长,因此也被称为增长率(growth rate)
blk = DenseBlock(2, 10)
X = tf.random.uniform((4, 8, 8,3))
Y = blk(X)
print(Y.shape)
#过渡层
#由于每个稠密块都会带来通道数的增加,使用过多则会带来过于复杂的模型。过渡层用来控制模型复杂度。
#通过1×1卷积层来减小通道数,并使用步幅为2的平均池化层减半高和宽,从而进一步降低模型复杂度。
class TransitionLayer(tf.keras.layers.Layer):
def __init__(self, out_channels):
super(TransitionLayer, self).__init__()
self.bn = tf.keras.layers.BatchNormalization()
self.conv = tf.keras.layers.Conv2D(filters=out_channels,
kernel_size=(1, 1),
strides=1,
padding="same")
self.pool = tf.keras.layers.MaxPool2D(pool_size=(2, 2),
strides=2,
padding="same")
def call(self, inputs):
x = self.bn(inputs)
x = tf.keras.activations.relu(x)
x = self.conv(x)
x = self.pool(x)
return x
#降低通道数为10
blk = TransitionLayer(10)
print(blk(Y).shape)
#结果:TensorShape([4, 4, 4, 10])
#DenseNet使用的是4个稠密块,我们可以设置每个稠密块使用多少个卷积层。
# 这里我们设成4,从而与上一节的ResNet-18保持一致。稠密块里的卷积层通道数(即增长率)设为32,所以每个稠密块将增加128个通道。
class DenseNet(tf.keras.Model):
def __init__(self, num_init_features, growth_rate, block_layers, compression_rate, drop_rate):
super(DenseNet, self).__init__()
self.conv = tf.keras.layers.Conv2D(filters=num_init_features,
kernel_size=(7, 7),
strides=2,
padding="same")
self.bn = tf.keras.layers.BatchNormalization()
self.pool = tf.keras.layers.MaxPool2D(pool_size=(3, 3),
strides=2,
padding="same")
self.num_channels = num_init_features
self.dense_block_1 = DenseBlock(num_layers=block_layers[0], growth_rate=growth_rate, drop_rate=drop_rate)
self.num_channels += growth_rate * block_layers[0]
self.num_channels = compression_rate * self.num_channels
self.transition_1 = TransitionLayer(out_channels=int(self.num_channels))
self.dense_block_2 = DenseBlock(num_layers=block_layers[1], growth_rate=growth_rate, drop_rate=drop_rate)
self.num_channels += growth_rate * block_layers[1]
self.num_channels = compression_rate * self.num_channels
self.transition_2 = TransitionLayer(out_channels=int(self.num_channels))
self.dense_block_3 = DenseBlock(num_layers=block_layers[2], growth_rate=growth_rate, drop_rate=drop_rate)
self.num_channels += growth_rate * block_layers[2]
self.num_channels = compression_rate * self.num_channels
self.transition_3 = TransitionLayer(out_channels=int(self.num_channels))
self.dense_block_4 = DenseBlock(num_layers=block_layers[3], growth_rate=growth_rate, drop_rate=drop_rate)
self.avgpool = tf.keras.layers.GlobalAveragePooling2D()
self.fc = tf.keras.layers.Dense(units=10,
activation=tf.keras.activations.softmax)
def call(self, inputs):
x = self.conv(inputs)
x = self.bn(x)
x = tf.keras.activations.relu(x)
x = self.pool(x)
x = self.dense_block_1(x)
x = self.transition_1(x)
x = self.dense_block_2(x)
x = self.transition_2(x)
x = self.dense_block_3(x)
x = self.transition_3(x,)
x = self.dense_block_4(x)
x = self.avgpool(x)
x = self.fc(x)
return x
def densenet():
return DenseNet(num_init_features=64, growth_rate=32, block_layers=[4,4,4,4], compression_rate=0.5, drop_rate=0.5)
mynet=densenet()
X = tf.random.uniform(shape=(1, 96, 96 , 1))
for layer in mynet.layers:
X = layer(X)
print(layer.name, 'output shape:\t', X.shape)
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.fashion_mnist.load_data()
x_train = x_train.reshape((60000, 28, 28, 1)).astype('float32') / 255
x_test = x_test.reshape((10000, 28, 28, 1)).astype('float32') / 255
mynet.compile(loss='sparse_categorical_crossentropy',
optimizer=tf.keras.optimizers.Adam(),
metrics=['accuracy'])
history = mynet.fit(x_train, y_train,
batch_size=64,
epochs=5,
validation_split=0.2)
test_scores = mynet.evaluate(x_test, y_test, verbose=2)
mynet.save_weights("DenseNet.h5")小结:
- 在跨层连接上,不同于ResNet中将输入与输出相加,DenseNet在通道维上连结输入与输出。
- DenseNet的主要构建模块是稠密块和过渡层。
总结:累。。。大家都跟着教程的代码敲一敲可能更容易理解。用沫神的话说就是,这些结构就试出来,胜者为王,准确率高的就有其道理存在。