STMCubeMX5.60版本CAN使用loopback模式自测------问题记录之时钟配置
参考资料:
https://blog.csdn.net/qq_32605451/article/details/88690863
使用芯片:STM32F407ZGT6
cube软件版本:5.60
软件包版本为:STM32CubeF4 Firmware Package V1.25.0 / 12-February-2020

can mode 选择master模式

系统时钟配置

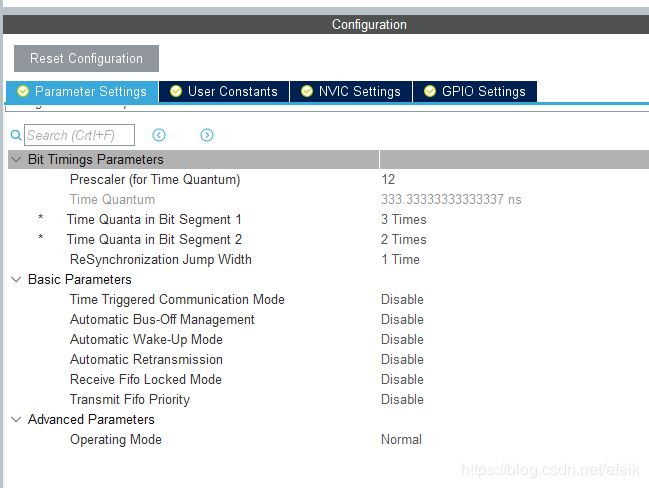
can 参数设置
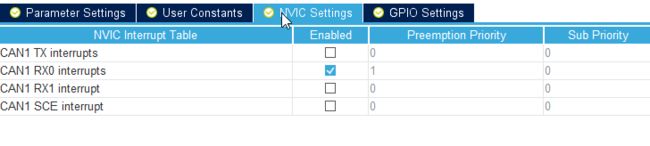
can NVIC设置选择 CAN1 RX0 interrupts 模式(跟can过滤器配置相关)
在project manager中 code generator选项勾选单独生成外设初 c / h 文件 这样工程文件结构更加清晰

最后点击 code generator 生成代码即可
在can.c 文件中配置can滤波器
void CAN1_Config(void)
{
CAN_FilterTypeDef CAN_FilterType;
CAN_FilterType.FilterBank = 0;
CAN_FilterType.FilterIdHigh = 0x0000;
CAN_FilterType.FilterIdLow = 0x0000;
CAN_FilterType.FilterMaskIdHigh = 0x0000;
CAN_FilterType.FilterMaskIdLow = 0x0000;
CAN_FilterType.FilterFIFOAssignment = CAN_RX_FIFO0;
CAN_FilterType.FilterMode = CAN_FILTERMODE_IDMASK;
CAN_FilterType.FilterScale = CAN_FILTERSCALE_32BIT;
CAN_FilterType.FilterActivation = ENABLE;
CAN_FilterType.SlaveStartFilterBank = 14;
if(HAL_CAN_ConfigFilter(&hcan1,&CAN_FilterType) != HAL_OK)
{
Error_Handler();
}
if(HAL_CAN_ActivateNotification(&hcan1,CAN_IT_RX_FIFO0_MSG_PENDING)!=HAL_OK)
{
Error_Handler();
}
if(HAL_CAN_Start(&hcan1)!=HAL_OK)
{
Error_Handler();
}
}can发送函数
uint8_t Can_TxMessage(uint8_t ide,uint32_t id,uint8_t len,uint8_t *data)
{
uint32_t TxMailbox;
CAN_TxHeaderTypeDef CAN_TxHeader;
HAL_StatusTypeDef HAL_RetVal;
uint16_t i=0;
if(ide == 0)
{
CAN_TxHeader.IDE = CAN_ID_STD; //标准帧
CAN_TxHeader.StdId = id;
}
else
{
CAN_TxHeader.IDE = CAN_ID_EXT; //扩展帧
CAN_TxHeader.ExtId = id;
}
CAN_TxHeader.DLC = len;
CAN_TxHeader.RTR = CAN_RTR_DATA;//数据帧,CAN_RTR_REMOTE遥控帧
CAN_TxHeader.TransmitGlobalTime = DISABLE;
while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan1) == 0)
{
i++;
if(i>0xfffe)
return 1;
}
HAL_Delay(2000);
HAL_RetVal = HAL_CAN_AddTxMessage(&hcan1,&CAN_TxHeader,data,&TxMailbox);
if(HAL_RetVal != HAL_OK)
return 1;
return 0;
}can接受中断回调函数(我直接上了can分析仪,屏蔽了串口打印)
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
CAN_RxHeaderTypeDef CAN_RxHeader;
HAL_StatusTypeDef HAL_Retval;
uint8_t CanRxBuff[8];
uint8_t Data_Len=0;
uint32_t ID=0;
uint8_t i;
HAL_Retval = HAL_CAN_GetRxMessage(hcan,CAN_RX_FIFO0,&CAN_RxHeader,CanRxBuff);
if(HAL_Retval == HAL_OK)
{
Data_Len = CAN_RxHeader.DLC;
if(CAN_RxHeader.IDE)
ID = CAN_RxHeader.ExtId;
else
ID = CAN_RxHeader.StdId;
// printf("id:%x\r\n",ID);
// printf("Data_Len:%d\r\n",Data_Len);
// for(i=0;i<8;i++)
// printf("Rx_Data[%d]=%x\r\n",i,Rx_Data[i]);
}
}主函数循环中调用can发送函数
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_9, GPIO_PIN_RESET);
HAL_Delay(1000);
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_9, GPIO_PIN_SET);
HAL_Delay(1000);
Can_TxMessage(0,0X222,8,CanTxBuff);
}
/* USER CODE END 3 */
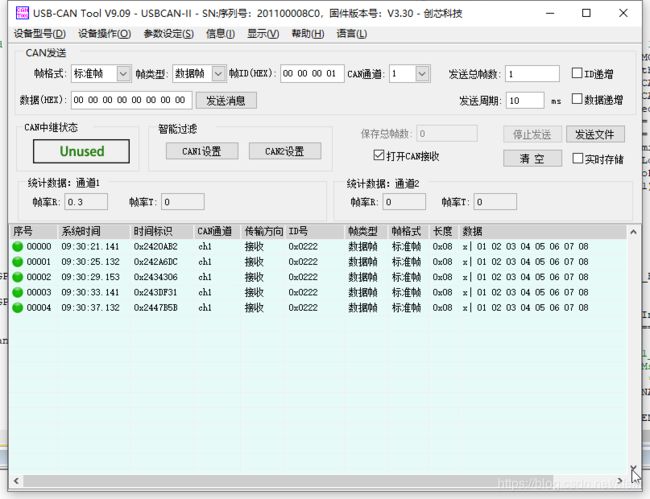
}然后烧写程序在can调试器监控界面中就看到了can数据
一开始配置后调试怎么都无法进入can接收中断
后来找到原因是can波特率配置有问题
一开始can时钟配置的是32M
波特率参数配置如图

波特率计算方法:
BaudRate=APB1CLK/分频系数/(1+BS1+BS2).
刚开始配置:32M/16/(1+2+1)=500k.
CAN工作模式:Normal
看正点原子的开发指南中说可以任意配置
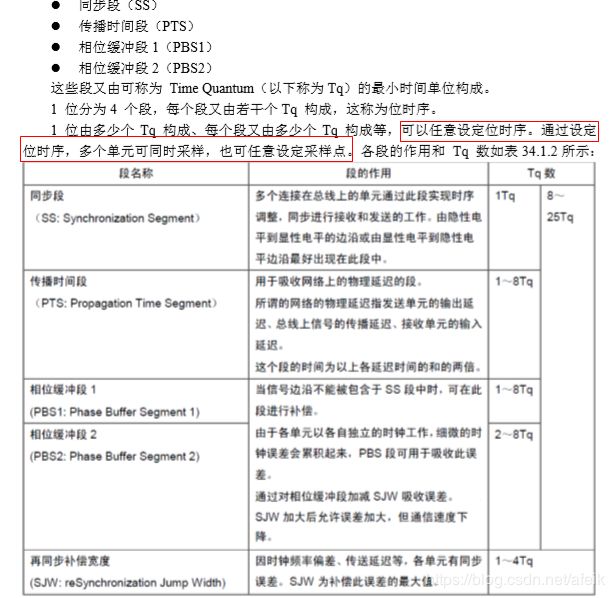
不知道为什么这样是不对的 tBS1 tBS2不是随意配置组合的,具体随后在深入追究(未完待续)
2020年3月15日 13:06:22更新
在其他地方找到质料 tBS1、tBS2、tSJW有设置原则
总体配置保持:
tBS1>=tBs2, tBS2>=1个CAN时钟周期,tBS2>=2tSJW
怕麻烦的记住3、2、1就行了
tBS1 = 3 Time
tBS2 = 2 Time
tSJW = 1 Time
大部分的波特率都可以使用(5k用642,400k和800k用531)
完