激光雷达:从光电技术角度看自动驾驶

来源: 传感器技术
激光雷达和与之竞争的传感器技术(相机、雷达和超声波)加强了对传感器融合的需要,也对认真谨慎地选择光电探测器、光源和MEMS振镜提出了更高的要求。
传感器技术、成像、雷达、光探测技术及测距技术(激光雷达)、电子技术和人工智能的进步,使数十种先进的驾驶员辅助系统(ADAS)得以实现,包括防撞、盲点监测、车道偏离预警和停车辅助等。通过传感器融合实现这些系统的同步运行,可以让完全自动驾驶的车辆监视周围环境,并警告驾驶员潜在的道路危险,甚至采取独立于驾驶员的躲避行动以防止碰撞。
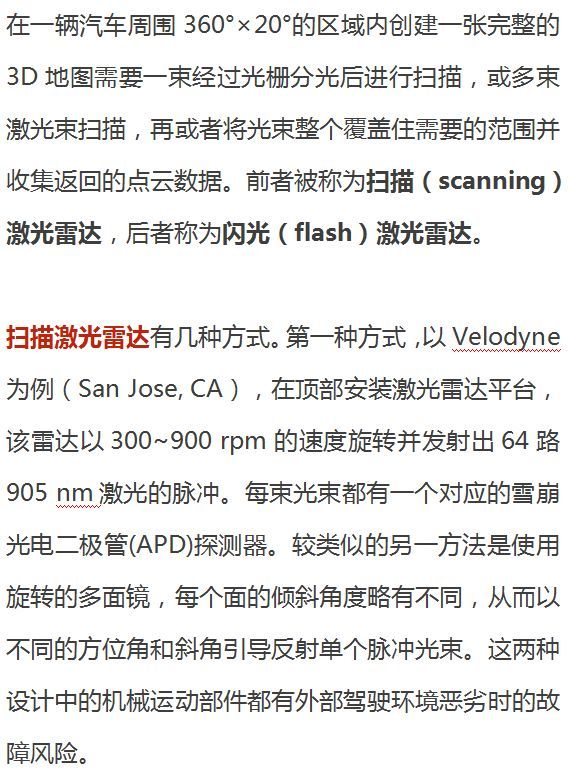
自动驾驶汽车还必须在高速状态下区分和识别前方的物体。通过测距技术,这些自动驾驶汽车必须快速构建一张约100m距离内的三维(3D)地图,并在高达250m距离范围内创建高角分辨率的图像。如果驾驶员不在场,车辆的人工智能必须做出最佳决策。
完成这一任务的几种基本方法之一,就是测量能量脉冲从自动驾驶车辆到目标再返回车辆的往返飞行时间(ToF)。当知道“脉冲”通过空气的速度时,就可以计算到反射点的距离——脉冲可以是超声波(声纳)、无线电波(雷达)或光(激光雷达)。
class="video_iframe" data-vidtype="2" allowfullscreen="" frameborder="0" data-ratio="1.7647058823529411" data-w="480" scrolling="no" data-src="http://v.qq.com/iframe/player.html?vid=r06087kp0fk&width=670&height=376.875&auto=0" style="display: none; width: 670px !important; height: 376.875px !important;" width="670" height="376.875" data-vh="376.875" data-vw="670"/>
美国西部光电展中滨松探测器激光雷达应用演示
使用APD制成的DEMO即使用的ToF法
在这三种ToF技术中,激光雷达是提供更高角度分辨率图像的最佳选择,因为它具有更小的衍射特性和光束发散度,可以比微波雷达更好地识别相邻物体。这种高角度分辨率在高速下尤为重要,可以提供足够的时间来应对潜在的危险,如迎面碰撞。
▼
激光光源的选择
在ToF激光雷达中,激光发射持续时间为τ的脉冲,在发射瞬间触发定时电路中的内部时钟(下文有图示)。从目标反射的光脉冲到达光电探测器,转换产生电信号输出使时钟停止计时。这种测量往返ToF Δt时间的方式可以计算到反射点的距离R。
如果激光和光电探测器实际上位于同一位置,则距离由下公式确定:
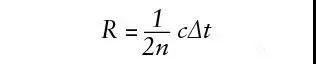
中c是真空中光速,n是传播介质的折射率(对空气来说大约为1),影响距离分辨率ΔR的因素有两个:测量Δt时的不确定度δΔt和脉冲宽度的导致的空间误差w(w = cτ)。
以第一个因素代表测距分辨率ΔR=1/2cδΔτ,而以第二个代表测距分辨率ΔR=1/2 w = 1/2 cτ。如果以5cm的分辨率测量距离,上述关系式分别意味着δΔt大约为300ps,τ大约为300ps。
飞行时间激光雷达要求光电探测器和其后的电子学系统具有很小的时间抖动(δΔτ的主要贡献因素)以及能够发射短脉宽时间的脉冲激光器,例如相对昂贵的皮秒激光器。目前典型的汽车激光雷达系统中的激光器产生约4ns持续时间的脉冲,所以减小光束发散是必要的。

光束发散取决于波长和发射天线尺寸(微波雷达)或透镜孔径大小(激光雷达)的比值。微波雷达这一比值较大,因此发散度更大,角度分辨率较低。图中微波雷达(黑色)将无法区分这两辆车,而激光雷达(红色)可以。
对汽车激光雷达系统设计者来说,最关键的选择之一是光波长。制约这一选择的因素有几个:
对人类视觉的安全性
在大气中的传播特性
激光的可用性和光电探测器的可用性
两种最流行的波长是905和1550 nm,905nm的主要优点是硅在该波长处吸收光子,而硅基光电探测器通常比探测1550 nm光所需的铟镓砷(InGaAs)近红外探测器便宜。

然而,1550nm的人类视觉安全度更高,可以使用单脉冲更大辐射能量的激光——这是光波长选择的一个重要因素。

大气衰减(在所有天气条件下)、空气中粒子的散射以及目标表面的反射率都与波长有关。由于有各种各样可能的天气条件和反射表面,对于这些条件下汽车激光雷达波长的选择来说是一个复杂的问题。在大多数实际情况下,905 nm处的光损失更小,因为在1550 nm处的水分的吸收率比905 nm处要大。
▼
光探测器的选择
只有一小部分脉冲发射的光子可以到达光电探测器的有效区域。如果大气衰减沿脉冲路径不变化,激光光束发散度可忽略不计,光斑尺寸小于目标,入射角垂直于探测器且反射体是朗伯体(所有方向均反射),则光接收峰值功率P(R)为:
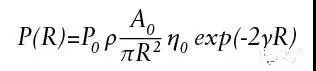
P0是发射激光脉冲的光峰值功率,ρ是目标的反射率,A0是接收器孔径面积,η0是光学系统透过率,γ是大气消光系数。
该方程表明,随着距离R的增加,接收功率迅速减小。为了合理选择参数,R=100 m,探测器的活动区域上返回光子的数量大约是几百到几千,而通常发射的光子超过1012。这些回波光子与背景光子同时被探测,而背景光子没有任何有用信息。
采用窄带滤波器可以减少到达探测器的背景光,但不能减少到零,背景光的影响使检测动态范围减小,噪声(背景光子拍摄噪声)增大。值得注意的是,典型条件下地面太阳辐照度在1550 nm处小于905 nm。







报告:面向自动驾驶Lidar的核心半导体器件介绍
class="video_iframe" data-vidtype="2" allowfullscreen="" frameborder="0" data-ratio="1.7647058823529411" data-w="480" scrolling="no" data-src="http://v.qq.com/iframe/player.html?vid=l0609rw824l&width=670&height=376.875&auto=0" style="display: none; width: 670px !important; height: 376.875px !important;" width="670" height="376.875" data-vh="376.875" data-vw="670"/>
▼
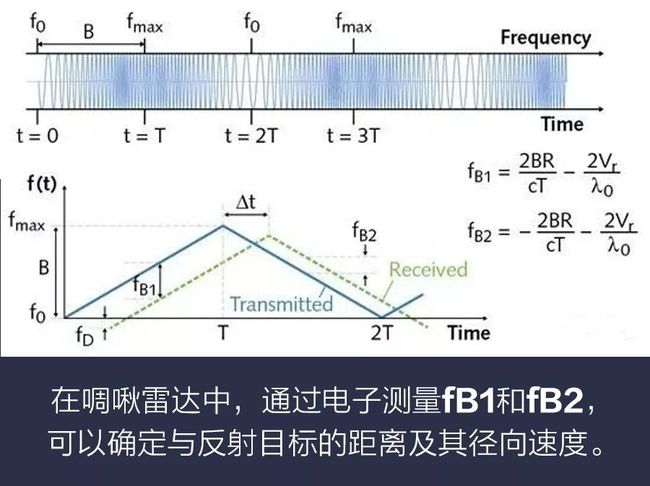
摆脱ToF法的限制



未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”
