在Linux下实现FreeRTOS的简单模拟器
FreeRTOS
基础知识不赘述,请参考朱工的专栏, 本文主要描述怎么在Linux的环境下跑一个FreeRTOS的模拟器
官方示例
FreeRTOS的官方提供了一个在Linux下的Simulator的示例,但是用的Kernel的版本非常老,是V6的版本,FreeRTOS现在已经进化到V10了,作为一个标准码农,不用最新版本简直不舒服斯基 >_<。
先把官方示例下载下来,在官方示例中,有一个Debug和Release的目录,在这两个目录下使用make all命令就可以直接编出来可执行文件在Linux下直接运行,当然,使用Eclipse直接打开对应的工程来编译也是可以的。
更新Kernel
先创建一个文件夹Simulator_Linux,其下有三个目录
FreeRTOS_Kernel
inc
srcFreeRTOS_Kernel中保存内核代码,inc和src保存APP的代码,当然,可以按照自己的爱好自行调整目录结构。
再去FreeRTOS官网下载最新的Kernel代码,解压后进入FreeRTOS\Source目录。
按照官方的示例,将最新的代码拷贝到FreeRTOS_Kernel目录中。
include目录中的头文件不管三七二十一全拷贝过来即可(我懒,不想一个个去梳理>_<)。
.c文件只需要拷贝croutine.c, list.c, queue.c以及tasks.c即可。(croutine其实也可以不用拷贝,但是要做一些配置)
portable文件夹不从FreeRTOS\Source拷贝,而从simulator的示例中拷贝(\Posix_GCC_Simulator\FreeRTOS_Posix\FreeRTOS_Kernel)
退回到上层目录,在将官方示例的simulator的根目录下的FreeRTOSConfig.h拷贝到inc目录下。
在src目录下创建main.c文件,在其中定义一个空的main函数即可。
此时,我们就拥有了一个完整的Kernel的代码,当然这个时候还是没法编译的,一来缺少makefile,二来portable的文件与最新的Kernel其实并不完全匹配。当然,APP的代码也就是main函数的代码也还是空的。
Makefile
参考官方示例的makefile,在根目录下创建Makefile文件,同样在子目录下也包含两个subdir.mk用来编译需要的对应的.o,具体不再赘述:
Makefile:
RM := rm -rf
PROJ_ROOT :=.
BUILD_TMP :=$(PROJ_ROOT)/tmp
TARGET_INC := -I$(PROJ_ROOT)/inc \
-I$(PROJ_ROOT)/FreeRTOS_Kernel/include \
-I$(PROJ_ROOT)/FreeRTOS_Kernel/portable/GCC/Posix
-include subdir.mk
-include FreeRTOS_Kernel/subdir.mk
ifneq ($(MAKECMDGOALS),clean)
ifneq ($(strip $(C_DEPS)),)
-include $(C_DEPS)
endif
endif
all:simulator_linux.bin
simulator_linux.bin: $(OBJS)
@echo 'Building target: $@'
gcc -pthread -lrt -o"simulator_linux.bin" $(OBJS) $(LIBS)
@echo 'Finished building target: $@'
@echo ' '
clean:
-$(RM) $(OBJS)$(C_DEPS)$(EXECUTABLES) simulator_linux.bin
-@echo ' '
.PHONY: all clean dependents
.SECONDARY:subdir.mk:
C_SRCS += \
$(PROJ_ROOT)/src/main.c
OBJS += \
$(BUILD_TMP)/main.o
C_DEPS += \
$(BUILD_TMP)/main.d
# Each subdirectory must supply rules for building sources it contributes
$(BUILD_TMP)/%.o: $(PROJ_ROOT)/src/%.c
@echo 'Building file: $<'
gcc -DUSE_STDIO=1 -D__GCC_POSIX__=1 $(TARGET_INC) -O2 -Wall -c -fmessage-length=0 -pthread -lrt -MMD -MP -MF"$(@:%.o=%.d)" -MT"$(@:%.o=%.d)" -o"$@" "$<"
@echo 'Finished building: $<'
@echo ' 'FreeRTOS_Kernel/subdir.mk
C_SRCS += \
$(PROJ_ROOT)/FreeRTOS_Kernel/croutine.c \
$(PROJ_ROOT)/FreeRTOS_Kernel/list.c \
$(PROJ_ROOT)/FreeRTOS_Kernel/queue.c \
$(PROJ_ROOT)/FreeRTOS_Kernel/tasks.c \
$(PROJ_ROOT)/FreeRTOS_Kernel/portable/GCC/Posix/port.c \
$(PROJ_ROOT)/FreeRTOS_Kernel/portable/MemMang/heap_3.c
OBJS += \
$(BUILD_TMP)/croutine.o \
$(BUILD_TMP)/list.o \
$(BUILD_TMP)/queue.o \
$(BUILD_TMP)/tasks.o \
$(BUILD_TMP)/port.o \
$(BUILD_TMP)/heap_3.o
C_DEPS += \
$(BUILD_TMP)/croutine.d \
$(BUILD_TMP)/list.d \
$(BUILD_TMP)/queue.d \
$(BUILD_TMP)/tasks.d \
$(BUILD_TMP)/port.d \
$(BUILD_TMP)/heap_3.d
$(BUILD_TMP)/%.o: $(PROJ_ROOT)/FreeRTOS_Kernel/%.c
@echo 'Building file: $<'
gcc -DUSE_STDIO=1 -D__GCC_POSIX__=1 $(TARGET_INC) -O2 -Wall -c -fmessage-length=0 -pthread -lrt -MMD -MP -MF"$(@:%.o=%.d)" -MT"$(@:%.o=%.d)" -o"$@" "$<"
@echo 'Finished building: $<'
@echo ' '
$(BUILD_TMP)/%.o: $(PROJ_ROOT)/FreeRTOS_Kernel/portable/GCC/Posix/%.c
@echo 'Building file: $<'
gcc -DUSE_STDIO=1 -D__GCC_POSIX__=1 $(TARGET_INC) -O2 -Wall -c -fmessage-length=0 -pthread -lrt -MMD -MP -MF"$(@:%.o=%.d)" -MT"$(@:%.o=%.d)" -o"$@" "$<"
@echo 'Finished building: $<'
@echo ' '
$(BUILD_TMP)/%.o: $(PROJ_ROOT)/FreeRTOS_Kernel/portable/MemMang/%.c
@echo 'Building file: $<'
gcc -DUSE_STDIO=1 -D__GCC_POSIX__=1 $(TARGET_INC) -O2 -Wall -c -fmessage-length=0 -pthread -lrt -MMD -MP -MF"$(@:%.o=%.d)" -MT"$(@:%.o=%.d)" -o"$@" "$<"
@echo 'Finished building: $<'
@echo ' 'OK,编译体系已经搞好。此时在根目录下直接敲 make all 就应该可以进行编译啦。
配置更新
此时直接make all会发现有一大堆错误,这是因为FreeRTOS的版本更新后一些结构体的名字发生了变化,在FreeRTOS.h中有一个兼容性的宏可以控制一部分的兼容性,但是因为版本跨度比较大, 我们依然需要在portmacro.h中做适当的适配:
/*-----------------------------------------------------------*/
typedef portSTACK_TYPE StackType_t;
typedef portBASE_TYPE BaseType_t;
typedef unsigned long UBaseType_t;
#define portTICK_PERIOD_MS ( ( TickType_t ) 1000 / configTICK_RATE_HZ )
#if( configUSE_16_BIT_TICKS == 1 )
typedef unsigned portSHORT TickType_t;
#define portMAX_DELAY ( TickType_t ) 0xffff
#else
typedef unsigned portLONG TickType_t;
#define portMAX_DELAY ( TickType_t ) 0xffffffff
#endif
/*-----------------------------------------------------------*/
/*
#if( configUSE_16_BIT_TICKS == 1 )
typedef unsigned portSHORT portTickType;
#define portMAX_DELAY ( portTickType ) 0xffff
#else
typedef unsigned portLONG portTickType;
#define portMAX_DELAY ( portTickType ) 0xffffffff
#endif
*/
/*-----------------------------------------------------------*/编译运行
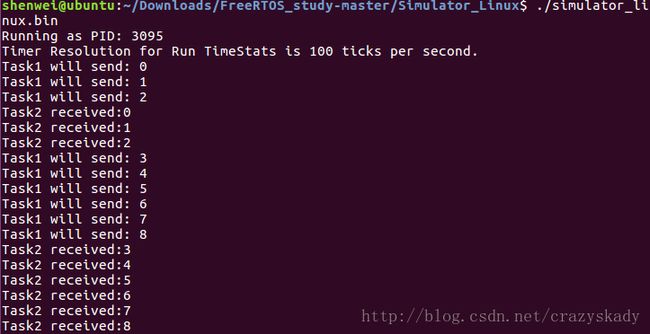
此时再make clean后重新make all,编译即可通过。但是实际上main.c里并没有执行任何代码,所以感受不到FreeRTOS的实际效果,我们在main.c中添加一些代码,来创建两个任务并通过消息队列来传递一些数据:
#include 再次重新编译,执行编译后在根目录下生成的simulator_linux.bin,即可看到两个Task之间的交互过程:
总结
FreeRTOS的内核极其小巧,只需要几个简单的文件就可以进行编译运行,当在不同的硬件上进行移植的时候,只需要修改portable目录里的文件即可完成对硬件的适配,实际上官方也提供了大量的已经完成移植的设备的portable文件,我们只需要简单的拷贝过来即可。^_^
btw: 本文完整的代码见我的github. :)