Android 5.0 Camera系统源码分析(5):Camera预览3A流程
1. 前言
本文分析的是Android Hal层的源码,硬件平台基于mt6735。之前几篇讲的预览流程中3A相关的环节都忽略了,现在重新整理下。
3A指的是Auto Exposure,Auto Focus,Auto White Balance。这三个一起放上来代码实在太多了,这里将重点记录AF的代码。AF的部分工作是由ISP完成的,而ISP的大部分代码mtk都没有开放给我们,比如ISP是如何计算得到对焦位置信息的,但得到对焦位置之后怎么操作对焦马达的代码我们是看得到的,所以涉及到ISP的一些代码将被略过
2. 初始化3A
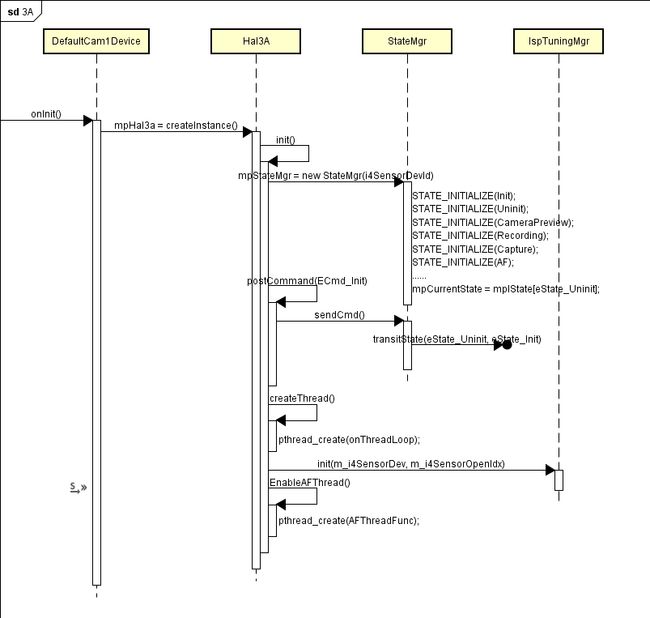
3A的初始化在DefaultCam1Device的onInit函数里面开始,之前在camera打开流程里面已经提到过
bool
DefaultCam1Device::
onInit()
{
......
// (1) Open 3A
mpHal3a = NS3A::IHal3A::createInstance(
NS3A::IHal3A::E_Camera_1,
getOpenId(),
LOG_TAG);
......
}构造一个Hal3A对象,看下Hal3A::createInstance的实现
Hal3A*
Hal3A::
createInstance(MINT32 i4SensorDevId, MINT32 i4SensorOpenIndex)
{
switch (i4SensorDevId)
{
case SENSOR_DEV_MAIN:
Hal3ADev::getInstance()->init(i4SensorDevId, i4SensorOpenIndex);
return Hal3ADev::getInstance();
break;
case SENSOR_DEV_SUB:
Hal3ADev::getInstance()->init(i4SensorDevId, i4SensorOpenIndex);
return Hal3ADev::getInstance();
break;
......
}
} 其实这里的Hal3A并没有直接继承IHal3A,也就是说从IHal3A::createInstance到Hal3A::createInstance的调用过程经历了一番波折,但暂时不用关心它。从Hal3A::createInstance可以看到除了实例化以外还会调用init函数。构造函数没什么好看的-略过,直接看init函数
MRESULT
Hal3A::
init(MINT32 i4SensorDevId, MINT32 i4SensorOpenIndex)
{
......
// (1)
mpStateMgr = new StateMgr(i4SensorDevId);
// (2)
bRet = postCommand(ECmd_Init);
// (3)
createThread();
// (4)
bRet = IspTuningMgr::getInstance().init(m_i4SensorDev, m_i4SensorOpenIdx);
// (5)
ret = EnableAFThread(1);
......
return S_3A_OK;
}步骤(1) new StateMgr,构造函数如下
StateMgr::StateMgr(MINT32 sensorDevId)
: ......
{
#define STATE_INITIALIZE(_state_)\
mpIState[eState_##_state_] = new State##_state_(sensorDevId, this);
STATE_INITIALIZE(Init);
STATE_INITIALIZE(Uninit);
STATE_INITIALIZE(CameraPreview);
STATE_INITIALIZE(CamcorderPreview);
STATE_INITIALIZE(Recording);
STATE_INITIALIZE(Precapture);
STATE_INITIALIZE(Capture);
STATE_INITIALIZE(AF);
mpCurrentState = mpIState[eState_Uninit];
}初始化3A的状态管理,将各个子状态都保存在mpIState数组里面,并将当前状态设置为Uninit状态
步骤(2) postCommand
MBOOL Hal3A::postCommand(ECmd_T const eCmd, MINTPTR const i4Arg)
{
......
ERROR_CHECK(mpStateMgr->sendCmd(eCmd))
......
}MRESULT StateMgr::sendCmd(ECmd_T eCmd)
{
Mutex::Autolock lock(m_Lock);
EIntent_T eNewIntent = static_cast(eCmd);
#define SEND_INTENT(_intent_)\
case _intent_: return mpCurrentState->sendIntent(intent2type<_intent_>());\
switch (eNewIntent)
{
SEND_INTENT(eIntent_CameraPreviewStart)
SEND_INTENT(eIntent_CameraPreviewEnd)
SEND_INTENT(eIntent_CaptureStart)
SEND_INTENT(eIntent_CaptureEnd)
SEND_INTENT(eIntent_RecordingStart)
SEND_INTENT(eIntent_RecordingEnd)
SEND_INTENT(eIntent_AFUpdate)
SEND_INTENT(eIntent_AFStart)
SEND_INTENT(eIntent_AFEnd)
SEND_INTENT(eIntent_Init)
SEND_INTENT(eIntent_Uninit)
}
return -1;
} 从步骤(1)可以看出这里的mpCurrentState指向的是StateUninit对象,所以接着看StateUninit的sendIntent函数
MRESULT
StateUninit::
sendIntent(intent2type<eIntent_Init>)
{
MY_LOG("[StateUninit::sendIntent]" );
// AAO DMA buffer init
MINT32 i4SensorIdx = m_pHal3A->getSensorOpenIdx();
if (ENABLE_3A_GENERAL & m_pHal3A->m_3ACtrlEnable) {
if (ENABLE_AAOBUF & m_pHal3A->m_3ACtrlEnable) {
// AAO DMA buffer init
if (!IAAOBufMgr::getInstance().init(m_SensorDevId, i4SensorIdx)) {
MY_ERR("IAAOBufMgr::getInstance().init() fail");
return E_3A_ERR;
}
if (!IAEBufMgr::getInstance().init(m_SensorDevId, i4SensorIdx)) {
MY_ERR("IAEBufMgr::getInstance().init() fail");
return E_3A_ERR;
}
}
if (ENABLE_AFOBUF & m_pHal3A->m_3ACtrlEnable) {
// AFO DMA buffer init
if (!IAFOBufMgr::getInstance().init(m_SensorDevId, i4SensorIdx)) {
MY_ERR("IAFOBufMgr::getInstance().init() fail");
return E_3A_ERR;
}
}
}
// State transition: eState_Uninit --> eState_Init
m_pStateMgr->transitState(eState_Uninit, eState_Init);
return S_3A_OK;
}做了一堆乱七八糟的初始化之后将3A状态从Uninit状态切换到Init状态
步骤(3) createThread和步骤(5) EnableAFThread
MVOID
Hal3A::createThread()
{
......
pthread_create(&mThread, NULL, onThreadLoop, this);
pthread_create(&mPDThread, NULL, PDThreadLoop, this);
pthread_create(&mPDVCThread, NULL, PDVCThreadLoop, this);
......
}MRESULT Hal3A::EnableAFThread(MINT32 a_bEnable)
{
if (a_bEnable) {
if (mbAFThreadLoop== 0)
{
......
pthread_create(&mAFThread, &attr, AFThreadFunc, this);
}
} else {
......
}
return ret;
}一共创建了4个线程,暂时只关心onThreadLoop 和AFThreadFunc。onThreadLoop是3A主线程,负责接收处理命令;AFThreadFunc负责实时更新AF参数
3. 处理PASS1_START_ISP事件
前面的3A初始化做的事情并不多,更多的准备工作是在接收到PASS1_START_ISP事件之后做的,PASS1_START_ISP事件是在之前的Camera预览流程控制流中提到的Pass1Node的startHw函数里面发送
MBOOL
Pass1NodeImpl::
startHw(list3.1 DefaultCtrlNode接收处理PASS1_START_ISP事件
Pass1Node发出的event将在DefaultCtrlNode的onNotify函数中接收处理
MBOOL
DefaultCtrlNodeImpl::
onNotify(MUINT32 const msg, MUINT32 const ext1, MUINT32 const ext2)
{
switch(msg)
{
case PASS1_START_ISP:
{
if(mpHal3a)
{
cmd = ECmd_CameraPreviewStart;
......
mpHal3a->sendCommand(cmd);
}
case PASS1_STOP_ISP:
{
......
}
case PASS1_EOF:
{
......
}
default:
{
ret = MTRUE;
}
}
return ret;
}Hal3a的sendCommand函数会把命令加入到命令队列,然后由主线程onThreadLoop获取
MVOID*
Hal3A::onThreadLoop(MVOID *arg)
{
while (_this->getCommand(rCmd, bGetCmd, MFALSE))
{
switch (rCmd.eCmd)
{
case ECmd_PrecaptureStart:
{
......
}
case ECmd_Update:
{
......
}
default:
if ( ! _this->postCommand(rCmd.eCmd, reinterpret_cast(&rCmd.rParamIspProfile)))
{
MY_ERR("Cmd(%d) failed(0x%x)", rCmd.eCmd, _this->getErrorCode());
AEE_ASSERT_3A_HAL("onThreadLoop postCommand fail(2).");
}
}
}
} onThreadLoop通过getCommand函数获取命令,获取到命令之后调用postCommand函数对命令进行处理
再看一次postCommand
MBOOL Hal3A::postCommand(ECmd_T const eCmd, MINTPTR const i4Arg)
{
if( eCmd == ECmd_CameraPreviewStart || eCmd == ECmd_CaptureStart)
{
mbEnAESenThd = MTRUE;
createAEThread();
mEnFlushVSIrq = mFlushVSIrqDone = 0;
mEnFlushAFIrq = mFlushAFIrqDone = 0;
}
......
ERROR_CHECK(mpStateMgr->sendCmd(eCmd))
......
return MTRUE;
}接收到的命令是ECmd_CameraPreviewStart,所以这里的createAEThread函数会执行
MVOID
Hal3A::createAEThread()
{
pthread_create(&mAESenThread, NULL, AESensorThreadLoop, this);
}加上这个AESensorThreadLoop,需要关注的线程增加到了3个
3.2 StateInit处理CameraPreviewStart命令
继续看mpStateMgr->sendCmd函数。之前介绍过,它会把命令交给当前状态的sendIntent函数进行处理。在初始化阶段已经把当前状态切换到init状态,所以来看StateInit的sendIntent的实现
MRESULT
StateInit::
sendIntent(intent2type<eIntent_CameraPreviewStart>)
{
if (ENABLE_3A_GENERAL & m_pHal3A->m_3ACtrlEnable) {
if (ENABLE_AAOBUF & m_pHal3A->m_3ACtrlEnable) {
// AAO DMAInit + AAStatEnable
if (!IAAOBufMgr::getInstance().DMAInit(m_SensorDevId)) {
MY_ERR("IAAOBufMgr::getInstance().DMAInit() fail");
return E_3A_ERR;
}
if (!IAAOBufMgr::getInstance().AAStatEnable(m_SensorDevId, MTRUE)) {
MY_ERR("IAAOBufMgr::getInstance().AAStatEnable() fail");
return E_3A_ERR;
}
if (!IAEBufMgr::getInstance().DMAInit(m_SensorDevId)) {
MY_ERR("IAEBufMgr::getInstance().DMAInit() fail");
return E_3A_ERR;
}
if (!IAEBufMgr::getInstance().AAStatEnable(m_SensorDevId, MTRUE)) {
MY_ERR("IAEBufMgr::getInstance().AAStatEnable() fail");
return E_3A_ERR;
}
}
if (ENABLE_AFOBUF & m_pHal3A->m_3ACtrlEnable) {
// AFO DMAInit + AFStatEnable
if (!IAFOBufMgr::getInstance().DMAInit(m_SensorDevId)) {
MY_ERR("IAFOBufMgr::getInstance().DMAInit() fail");
return E_3A_ERR;
}
if (!IAFOBufMgr::getInstance().AFStatEnable(m_SensorDevId, MTRUE)) {
MY_ERR("IAFOBufMgr::getInstance().AFStatEnable() fail");
return E_3A_ERR;
}
}
......
if (ENABLE_AWB & m_pHal3A->m_3ACtrlEnable) {
// AWB init
bRet = (m_pHal3A->get3APreviewMode() == EPv_Normal)
? IAwbMgr::getInstance().cameraPreviewInit(m_SensorDevId, i4SensorIdx, rParam)
: IAwbMgr::getInstance().camcorderPreviewInit(m_SensorDevId, i4SensorIdx, rParam);
if (!bRet) {
MY_ERR("IAwbMgr::getInstance().PreviewInit() fail, PvMode = %d\n", m_pHal3A->get3APreviewMode());
return E_3A_ERR;
}
}
if (ENABLE_AE & m_pHal3A->m_3ACtrlEnable) {
// AE init
err = (m_pHal3A->get3APreviewMode() == EPv_Normal)
? IAeMgr::getInstance().cameraPreviewInit(m_SensorDevId, i4SensorIdx, rParam)
: IAeMgr::getInstance().camcorderPreviewInit(m_SensorDevId, i4SensorIdx, rParam);
if (FAILED(err)) {
MY_ERR("IAeMgr::getInstance().PreviewInit() fail, PvMode = %d\n", m_pHal3A->get3APreviewMode());
return err;
}
}
if (ENABLE_AF & m_pHal3A->m_3ACtrlEnable) {
// AF init
err = IAfMgr::getInstance().init(m_SensorDevId, i4SensorIdx);
if (FAILED(err)) {
MY_ERR("AfMgr::getInstance().init() fail\n");
return err;
}
}
IspTuningMgr::getInstance().sendIspTuningIOCtrl(m_SensorDevId, IspTuningMgr::E_ISPTUNING_SET_GMA_SCENARIO, IspTuningMgr::E_GMA_SCENARIO_PREVIEW, 0);
IspTuningMgr::getInstance().sendIspTuningIOCtrl(m_SensorDevId, IspTuningMgr::E_ISPTUNING_NOTIFY_START, 0, 0);
// Reset frame count to -2
m_pStateMgr->resetFrameCount();
// State transition: eState_Init --> eState_CameraPreview
m_pStateMgr->transitState(eState_Init, eState_CameraPreview);
return S_3A_OK;
}包含了AWB、AE、AF在内的ISP相关的初始化,相关的初始化完成之后会调用m_pStateMgr->transitState函数将当前状态切换到CameraPreview状态。
代码太多,这里只关注AF的初始化
MRESULT AfMgr::init(MINT32 i4SensorIdx, MINT32 isInitMCU)
{
......
// --- init MCU ---
SensorStaticInfo rSensorStaticInfo;
if (m_i4EnableAF == -1)
{
IHalSensorList* const pIHalSensorList = IHalSensorList::get();
IHalSensor* pIHalSensor = pIHalSensorList->createSensor("af_mgr", m_i4SensorIdx);
SensorDynamicInfo rSensorDynamicInfo;
switch(m_i4CurrSensorDev)
{
case ESensorDev_Main:
pIHalSensorList->querySensorStaticInfo(NSCam::SENSOR_DEV_MAIN, &rSensorStaticInfo);
pIHalSensor->querySensorDynamicInfo(NSCam::SENSOR_DEV_MAIN, &rSensorDynamicInfo);
break;
case ESensorDev_Sub:
......
default:
MY_ERR("Invalid sensor device: %d", m_i4CurrSensorDev);
}
if(pIHalSensor) pIHalSensor->destroyInstance("af_mgr");
......
m_i4CurrSensorId=rSensorStaticInfo.sensorDevID;
MCUDrv::lensSearch(m_i4CurrSensorDev, m_i4CurrSensorId);
m_i4CurrLensId = MCUDrv::getCurrLensID(m_i4CurrSensorDev);
......
}
if(isInitMCU)
{
m_pMcuDrv = MCUDrv::createInstance(m_i4CurrLensId);
if (m_pMcuDrv->init(m_i4CurrSensorDev) < 0)
{
MY_ERR("m_pMcuDrv->init() fail");
m_i4EnableAF = 0;
}
else
{
m_pMcuDrv->moveMCU( 0, m_i4CurrSensorDev);
m_MoveLensTimeStamp = getTimeStamp();
}
}
// --- init ISP Drv/Reg ---
......
// --- checking PDAF is supported or not ---
......
// --- init af algo ---
......
// --- NVRAM ---
int err;
err = NvBufUtil::getInstance().getBufAndRead(CAMERA_NVRAM_DATA_LENS, m_i4CurrSensorDev, (void*&)g_pNVRAM_LENS);
if(err!=0)
MY_ERR("AfAlgo NvBufUtil get buf fail! \n");
m_NVRAM_LENS.rFocusRange = g_pNVRAM_LENS->rFocusRange;
m_NVRAM_LENS.rAFNVRAM= g_pNVRAM_LENS->rAFNVRAM;
m_NVRAM_LENS.rPDNVRAM = g_pNVRAM_LENS->rPDNVRAM;
// --- Param ---
m_sAFParam = getAFParam();
m_sAFConfig = getAFConfig();
m_pIAfAlgo->setAFParam(m_sAFParam, m_sAFConfig, m_NVRAM_LENS.rAFNVRAM);
m_pIAfAlgo->initAF(m_sAFInput, m_sAFOutput);
......
m_pIAfAlgo->setAFMode(m_eLIB3A_AFMode);
//init pd mgr
......
return S_AF_OK;
}第30行,调用lensSearch函数匹配镜头驱动
第35-49行,将镜头移动到起始位置
第60-67行,获取af tuning参数
第69-73行,设置af tuning参数
3.3 匹配镜头驱动
MTK为多个镜头做了兼容,所以AF初始化的第一步就是找到当前对应镜头的型号。lensSearch函数实现了lens的匹配过程
int
MCUDrv::lensSearch( unsigned int a_u4CurrSensorDev, unsigned int a_u4CurrSensorId)
{
INT32 i;
LensCustomInit(a_u4CurrSensorDev);
if (a_u4CurrSensorDev == MCU_DEV_MAIN )
{
LensCustomGetInitFunc(&MCUDrv::m_LensInitFunc_main[0]);
MCUDrv::m_u4CurrLensIdx_main = 0;
for (i=0; i
{
if ((MCUDrv::m_LensInitFunc_main[i].LensId == DUMMY_LENS_ID) ||
(MCUDrv::m_LensInitFunc_main[i].LensId == SENSOR_DRIVE_LENS_ID) /*||
(MCUDrv::m_LensInitFunc_main[i].LensId == FM50AF_LENS_ID)*/
)
{
MCUDrv::m_u4CurrLensIdx_main = i;
}
}
// force assign LensIdx if SensorId != DUMMY_SENSOR_ID (to support backup lens/new lens driver)
for (i=0; i
{
if ((MCUDrv::m_LensInitFunc_main[i].SensorId == a_u4CurrSensorId) && (a_u4CurrSensorId!=0xFFFF) && (a_u4CurrSensorId!=0x0))
{
MCUDrv::m_u4CurrLensIdx_main = i;
MCU_DRV_DBG("[idx]%d [CurrSensorId]0x%04x,[CurrLensIdx]0x%04x\n", i, a_u4CurrSensorId, MCUDrv::m_u4CurrLensIdx_main);
break;
}
}
LensCustomSetIndex(MCUDrv::m_u4CurrLensIdx_main);
MCU_DRV_DBG("[CurrLensIdx]%d", MCUDrv::m_u4CurrLensIdx_main);
}
else if( a_u4CurrSensorDev == MCU_DEV_SUB)
{
......
}
else
return MCU_INVALID_DRIVER;
return MCU_NO_ERROR;
} 先看LensCustomInit函数,由它来获取拷贝整个lens列表
MUINT32 LensCustomInit(unsigned int a_u4CurrSensorDev)
{
GetLensInitFuncList(&LensInitFunc[0], a_u4CurrSensorDev);
return 0;
}UINT32 GetLensInitFuncList(PMSDK_LENS_INIT_FUNCTION_STRUCT pLensList, unsigned int a_u4CurrSensorDev)
{
if(a_u4CurrSensorDev==2) //sub
memcpy(pLensList, &LensList_sub[0], sizeof(MSDK_LENS_INIT_FUNCTION_STRUCT)* MAX_NUM_OF_SUPPORT_LENS);
else if(a_u4CurrSensorDev==4) //main 2
memcpy(pLensList, &LensList_main2[0], sizeof(MSDK_LENS_INIT_FUNCTION_STRUCT)* MAX_NUM_OF_SUPPORT_LENS);
else // main or others
memcpy(pLensList, &LensList_main[0], sizeof(MSDK_LENS_INIT_FUNCTION_STRUCT)* MAX_NUM_OF_SUPPORT_LENS);
return MHAL_NO_ERROR;
}根据前后摄像头拷贝不同的LensList,这里只看其中的LensList_main
MSDK_LENS_INIT_FUNCTION_STRUCT LensList_main[MAX_NUM_OF_SUPPORT_LENS] =
{
{DUMMY_SENSOR_ID, DUMMY_LENS_ID, "Dummy", pDummy_getDefaultData},
#if defined(SENSORDRIVE)
{OV3640_SENSOR_ID, SENSOR_DRIVE_LENS_ID, "kd_camera_hw", pSensorDrive_getDefaultData},
#endif
#if defined(FM50AF)
{DUMMY_SENSOR_ID, FM50AF_LENS_ID, "FM50AF", pFM50AF_getDefaultData},
#endif
#if defined(DW9714AF)
{IMX135_SENSOR_ID, DW9714AF_LENS_ID, "DW9714AF", pDW9714AF_getDefaultData},
#endif
......
};LensList_main包含了后摄所有可用的lens,如果要新增一个lens驱动,就需要往这个数组添加相关的信息,看下MSDK_LENS_INIT_FUNCTION_STRUCT结构体的定义
typedef struct
{
UINT32 SensorId;
UINT32 LensId;
UINT8 LensDrvName[32];
UINT32 (*getLensDefault)(VOID *pDataBuf, UINT32 size);
} MSDK_LENS_INIT_FUNCTION_STRUCT, *PMSDK_LENS_INIT_FUNCTION_STRUCT;SensorId:表示这个lens driver配置给对应的sensor使用,如果配置成DUMMY_SENSOR_ID则表示这个lens driver适合所有sensor使用
LensId:Lens driver的唯一标识
LensDrvName:是实现AF功能的驱动对应的设备驱动节点名。例如FM20AF,实现AF功能的是内核驱动里面的fm20af.c,这个驱动会生成一个驱动节点”/dev/fm20af”
getLensDefault:这个函数指针指向了获取AF tuning参数表的一个函数
回到lensSearch函数,现在lens列表已经保存在LensInitFunc数组中了,接下来调用LensCustomGetInitFunc函数把它拷贝到m_LensInitFunc_main数组中
MUINT32 LensCustomGetInitFunc(MSDK_LENS_INIT_FUNCTION_STRUCT *a_pLensInitFunc)
{
if (a_pLensInitFunc != NULL) {
memcpy(a_pLensInitFunc, &LensInitFunc[0], sizeof(MSDK_LENS_INIT_FUNCTION_STRUCT) * MAX_NUM_OF_SUPPORT_LENS);
return 0;
}
return -1;
}lensSearch函数再接下来就是两个for循环,从m_LensInitFunc_main数组中搜索符合要求的lens驱动
第一个for循环:m_u4CurrLensIdx_main指向m_LensInitFunc_main数组里lensId配置为DUMMY_LENS_ID或SENSOR_DRIVE_LENS_ID的最后一个元素
第二个for循环:查找m_LensInitFunc_main数组中是否有SensorId和当前使用的sensor的ID相匹配的lens driver。如果有则为符合条件的第一个元素,没有的话则为第一个for循环搜索到的结果
最后调用LensCustomSetIndex把匹配到的lens driver的index保存下来
3.4 初始化镜头驱动
找到镜头驱动之后还需要对镜头进行初始化,也就是将镜头移动到起始位置,所以回到AfMgr::init函数
主要是下面这3行代码
m_pMcuDrv = MCUDrv::createInstance(m_i4CurrLensId);
m_pMcuDrv->init(m_i4CurrSensorDev);
m_pMcuDrv->moveMCU( 0, m_i4CurrSensorDev);MCUDrv::createInstance创建的是LensDrv对象,它继承了MCUDrv类
接下来调用m_pMcuDrv->init函数来打开设备驱动节点,然后调用m_pMcuDrv->moveMCU函数来控制焦马达将镜头移动到起始位置
int
LensDrv::init(unsigned int a_u4CurrSensorDev )
{
char cBuf[64];
unsigned int a_u4CurrLensIdx;
if(a_u4CurrSensorDev==MCU_DEV_MAIN)
{
a_u4CurrLensIdx=MCUDrv::m_u4CurrLensIdx_main;
sprintf(cBuf, "/dev/%s", MCUDrv::m_LensInitFunc_main[a_u4CurrLensIdx].LensDrvName);
DRV_DBG("main lens init() [m_userCnt]%d +\n", m_userCnt_main);
DRV_DBG("[main Lens Driver]%s\n", cBuf);
Mutex::Autolock lock(mLock);
if (m_userCnt_main == 0) {
if (m_fdMCU_main == -1) {
m_fdMCU_main = open(cBuf, O_RDWR);
if (m_fdMCU_main < 0) {
......
}
}
}
m_userCnt_main++;
DRV_DBG("main lens init() [m_userCnt]%d [fdMCU_main]%d - \n", m_userCnt_main,m_fdMCU_main);
}
else if(a_u4CurrSensorDev==MCU_DEV_SUB)
{
......
}
else
return MCUDrv::MCU_INVALID_DRIVER;
return MCUDrv::MCU_NO_ERROR;
}第20行,根据之前匹配到的lens信息打开设备驱动节点,例如/dev/fm20af
int
LensDrv::moveMCU(int a_i4FocusPos,unsigned int a_u4CurrSensorDev )
{
//DRV_DBG("moveMCU() - pos = %d \n", a_i4FocusPos);
int err, a_fdMCU,a_u4CurrLensIdx;
if(a_u4CurrSensorDev==MCU_DEV_MAIN)
{
a_fdMCU=m_fdMCU_main;
a_u4CurrLensIdx=MCUDrv::m_u4CurrLensIdx_main;
}
else if(a_u4CurrSensorDev==MCU_DEV_SUB)
{
......
}
......
err = ioctl(a_fdMCU,mcuIOC_T_MOVETO,(unsigned long)a_i4FocusPos);
if (err < 0) {
DRV_ERR("[moveMCU] ioctl - mcuIOC_T_MOVETO, error %s", strerror(errno));
return err;
}
return MCUDrv::MCU_NO_ERROR;
}第19行,通过ioctl函数来移动对焦马达,kernel层对应的lens驱动会通过i2c设置lens的寄存器。ioctl的最后一个参数a_i4FocusPos代表将镜头移动到什么位置
3.5 设置AF参数
接下来还需要把之前获取到的lens tuning参数表设置到ISP里面,在AfMgr::init函数的第60-73行代码。
首先通过NvBufUtil的getBufAndRead函数读取lens tuning参数表,这个函数最终将调用到GetLensDefaultPara函数
void GetLensDefaultPara(PNVRAM_LENS_PARA_STRUCT pLensParaDefault)
{
MUINT32 i;
MUINT32 LensId = LensInitFunc[gMainLensIdx].LensId;
if (LensInitFunc[0].getLensDefault == NULL)
{
CAM_MSDK_LOG("[GetLensDefaultPara]: uninit yet\n\n");
return;
}
for (i=0; iif (LensId == LensInitFunc[i].LensId)
{
break;
}
}
if (pLensParaDefault != NULL)
{
LensInitFunc[i].getLensDefault((VOID*)pLensParaDefault, sizeof(NVRAM_LENS_PARA_STRUCT));
}
} 第23行,LensInitFunc[i].getLensDefault之前已经提到过,getLensDefault指向对应镜头的getDefaultData函数指针,例如fm50af的pFM50AF_getDefaultData,而这个函数指针则指向FM50AF_getDefaultData函数,调用这个函数会将lens tuning参数表拷贝到buff里
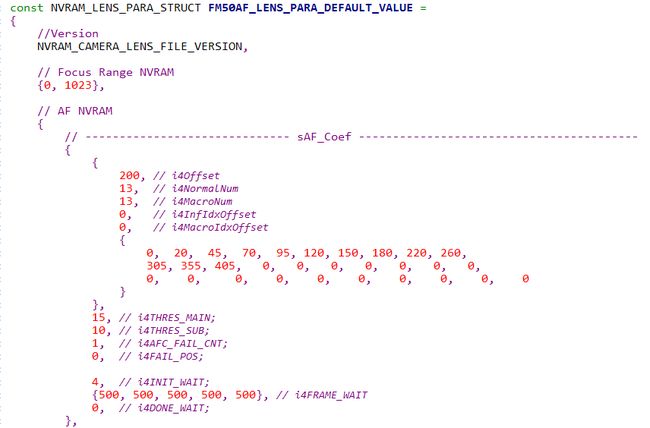
获取到lens tuning参数表之后调用m_pIAfAlgo->setAFParam函数将参数表设置到ISP里面,很遗憾IAfAlgo相关函数的实现我们是看不到的
AfMgr::init函数执行完之后,AF相关的准备工作就已经完成,接下来就是根据不同的场景实时更新3A参数了
4. 实时更新AF
之前提到过有3个需要重点关注的线程,onThreadLoop、AFThreadFunc和AESensorThreadLoop。
其中AFThreadFunc负责实时更新AF参数
MVOID * Hal3A::AFThreadFunc(void *arg)
{
......
while (_this->mbAFThreadLoop) {
if ( _this->mpIspDrv_forAF->waitIrq(&waitIrq) > 0) // success
{
MY_LOG_IF(fgLogEn, "[Hal3A::AFThreadFunc] AF waitIrq done\n");
_this->mpScheduler->jobAssignAndTimerStart(E_Job_Af);
_this->mpStateMgr->sendCmd(ECmd_AFUpdate);
_this->mpScheduler->jobTimerEnd(E_Job_Af);
MY_LOG_IF(fgLogEn, "[Hal3A::AFThreadFunc] StateMgr::sendCmd(ECmd_AFUpdate) done\n");
}
......
}
return NULL;
}AFThreadFunc函数还挺长的,但除了上面贴出来的这些代码,其它的我都不知道它在做什么。当需要更新AF的参数时ISP会产生一个中断,而这里则通过一个死循环不断去捕获中断。捕获到中断之后通过mpStateMgr->sendCmd函数将命令交给当前状态的sendIntent函数进行处理。当前状态已经在处理PASS1_START_ISP事件时切换到CameraPreview状态了,所以AFUpdate命令将在StateCameraPreview的sendIntent函数中处理
MRESULT
StateCameraPreview::
sendIntent(intent2type)
{
......
// (0) Dequeue AFO DMA buffer
IAFOBufMgr::getInstance().dequeueHwBuf(m_SensorDevId, rBufInfo);
// (1) get AF window from AF, and set to AE meter, then get Y value.
IAfMgr::getInstance().getAFRefWin(m_SensorDevId, rWinSize);
rAeWinSize.i4Left =rWinSize.i4Left;
rAeWinSize.i4Right =rWinSize.i4Right;
rAeWinSize.i4Top =rWinSize.i4Top;
rAeWinSize.i4Bottom=rWinSize.i4Bottom;
rAeWinSize.i4Weight=rWinSize.i4Weight;
IAeMgr::getInstance().getAEMeteringYvalue(m_SensorDevId, rAeWinSize, &iYvalue);
// (2) get current AE info, and write to AF for reference.
IAeMgr::getInstance().getAEBlockYvalues(m_SensorDevId, rAEInfo.aeBlockV, 25);
IAeMgr::getInstance().getPreviewParams(m_SensorDevId, rPreviewInfo);
IAeMgr::getInstance().getRTParams(m_SensorDevId, AEFrameParam);
rAEInfo.i4IsAEStable= IAeMgr::getInstance().IsAEStable(m_SensorDevId);
rAEInfo.i4ISO=rPreviewInfo.u4RealISO;
rAEInfo.i4SceneLV=IAeMgr::getInstance().getLVvalue(m_SensorDevId,MTRUE);
rAEInfo.iYvalue=(MINT64)iYvalue;
rAEInfo.ishutterValue=AEFrameParam.u4PreviewShutterSpeed_us;
......
IAfMgr::getInstance().setAE2AFInfo(m_SensorDevId, rAEInfo);
// (3) doAF
IAfMgr::getInstance().doAF(m_SensorDevId, reinterpret_cast(rBufInfo.virtAddr));
// (4) Enqueue AFO DMA buffer
IAFOBufMgr::getInstance().enqueueHwBuf(m_SensorDevId, rBufInfo);
......
return S_3A_OK;
} 直接看步骤(3)doAF函数吧,其它的步骤大部分是在为Algo设置参数,而Algo的代码不开放,所以也不知道设置的那些信息是做什么用的
MRESULT AfMgr::doAF(MVOID *pAFStatBuf)
{
if (m_i4EnableAF == 0)
{
m_sAFOutput.i4IsAFDone = 1;
m_sAFOutput.i4IsFocused = 0;
m_i4LastFocusModeTAF= FALSE;
m_sAFOutput.i4AFPos = 0;
mAFMgrInited = MTRUE;
MY_LOG("disableAF");
return S_AF_OK;
}
//depth AF for algo data
m_DAF_TBL.curr_p1_frm_num=i4curFrmNum;
if(m_DAF_TBL.is_daf_run==1) m_sAFInput.i4HybridAFMode = 1;
else m_sAFInput.i4HybridAFMode = 0;
if( m_PDAF_Sensor_Support_Mode==1 && m_PDBuf_Type==EPDBuf_Raw) m_sAFInput.i4HybridAFMode = 2; //2'b 0010
else if(m_PDAF_Sensor_Support_Mode==2 && m_PDBuf_Type==EPDBuf_VC) m_sAFInput.i4HybridAFMode = 2; //2'b 1010
else if(m_PDAF_Sensor_Support_Mode==2 && m_PDBuf_Type==EPDBuf_VC_Open) m_sAFInput.i4HybridAFMode = 10; //2'b 1010
if(m_DAF_TBL.is_daf_run==1)
{
m_sAFInput.i4CurrP1FrmNum = i4curFrmNum;
if(m_next_query_FrmNum == 0xFFFFFFFF)
{
m_sAFInput.i4DafDacIndex = 0;
m_sAFInput.i4DafConfidence = 0;
}
else
{
m_sAFInput.i4DafDacIndex = m_DAF_TBL.daf_vec[m_next_query_FrmNum % DAF_TBL_QLEN].daf_dac_index;
m_sAFInput.i4DafConfidence= m_DAF_TBL.daf_vec[m_next_query_FrmNum % DAF_TBL_QLEN].daf_confidence;
}
MY_LOG("DAF--[Mode]%d [cp1#]%d [cp2#]%d [nextF#]%d [DafDac]%d [DafConf]%d [daf_dist]%d\n",
(MINT32)m_sAFInput.i4HybridAFMode,
(MINT32)m_sAFInput.i4CurrP1FrmNum,
(MINT32)m_DAF_TBL.curr_p2_frm_num,
(MINT32)m_next_query_FrmNum,
(MINT32)m_sAFInput.i4DafDacIndex,
(MINT32)m_sAFInput.i4DafConfidence,
m_DAF_TBL.daf_vec[m_next_query_FrmNum % DAF_TBL_QLEN].daf_distance);
if(m_DAF_TBL.daf_vec[m_next_query_FrmNum % DAF_TBL_QLEN].daf_confidence)
{
MY_LOG("DAFAA-%d %d\n", m_daf_distance, m_DAF_TBL.daf_vec[m_next_query_FrmNum % DAF_TBL_QLEN].daf_confidence);
m_daf_distance = (MINT32)m_DAF_TBL.daf_vec[m_next_query_FrmNum % DAF_TBL_QLEN].daf_distance;
}
}
//PDAF
......
//handle AF
if (m_pIAfAlgo)
m_pIAfAlgo->handleAF(m_sAFInput, m_sAFOutput);
//move AF
m_pMcuDrv->moveMCU(m_sAFOutput.i4AFPos,m_i4CurrSensorDev);
//set AF info to IspTuning
AF_INFO_T sAFInfo;
sAFInfo.i4AFPos = m_sAFOutput.i4AFPos;
IspTuningMgr::getInstance().setAFInfo(m_i4CurrSensorDev, sAFInfo);
return S_AF_OK;
}这个函数的代码还挺多的,看不懂的代码就不贴上来了。其中大部分代码都是为了第57行m_pIAfAlgo->handleAF函数做准备,也就是设置m_sAFInput参数。m_pIAfAlgo->handleAF会计算得到对焦位置信息并保存在m_sAFOutput参数里面,当然algo的代码我们看不到。得到对焦位置信息之后会调用m_pMcuDrv->moveMCU函数来移动对焦马达,也就是第60行,这个函数之前已经分析过了。最后第65行需要把对焦信息设置到Isp Tuning里面。
就这样AFThreadFunc通过一个死循环等待ISP中断,然后计算出对焦位置并通知镜头驱动移动对焦马达
5. 实时更新AE
在上一篇Camera预览流程数据流里提到过,Pass1Node每deque一帧数据就会发出PASS1_EOF事件来更新3A,这个事件同样由DefaultCtrlNode的onNotify函数接收处理
5.1 处理PASS1_EOF事件
MBOOL
DefaultCtrlNodeImpl::
onNotify(MUINT32 const msg, MUINT32 const ext1, MUINT32 const ext2)
{
......
switch(msg)
{
......
case PASS1_EOF:
{
{
Mutex::Autolock _l(mLock);
//
if( mpHal3a &&
getFlag(muStateFlag, FLAG_DO_3A_UPDATE) && // to avoid send update after precaptrue-end
ext1 != MAGIC_NUM_INVALID )
{
MUINT32 zoomRatio = 0, cropX = 0, cropY = 0, cropW = 0, cropH = 0;
if(mpIspSyncCtrl->getCurPass2ZoomInfo(zoomRatio,cropX,cropY,cropW,cropH))
{
mpHal3a->setZoom(
zoomRatio,
cropX,
cropY,
cropW,
cropH);
}
//do 3A update
mCurMagicNum = ext1;
ParamIspProfile_T _3A_profile(
mIspProfile,
mCurMagicNum,
MTRUE,
ParamIspProfile_T::EParamValidate_All);
mpHal3a->sendCommand(ECmd_Update, reinterpret_cast(&_3A_profile));
}
else
{
MY_LOGD("skip update");
}
}
......
break;
}
default:
{
ret = MTRUE;
}
}
return ret;
} 第37行,向Hal3A发送update命令。和之前的AFUpdate命令一样,由Hal3A的postCommand函数接收命令,它再将命令转发给3A的当前状态,也就是CameraPreview状态处理
MRESULT
StateCameraPreview::
sendIntent(intent2type)
{
......
// update AE
MBOOL isNeedUpdateI2C;
IAeMgr::getInstance().doPvAEmonitor(m_SensorDevId, m_pStateMgr->getFrameCount(), reinterpret_cast(rBufInfo.virtAddr),
m_pScheduler->jobAssignAndTimerStart(E_Job_AeFlare), 1,
m_pScheduler->isSlowMotion(), isNeedUpdateI2C);
MBOOL isSlowMotionUpdateI2C;
isSlowMotionUpdateI2C = m_pScheduler->jobAssignAndTimerStart(E_Job_AeFlare) && m_pScheduler->isSlowMotion();
if(isNeedUpdateI2C || isSlowMotionUpdateI2C)
{
MY_LOG_IF(fgLogEn, "[%s] postToAESenThread : wait to update I2C (%d, %d)", __FUNCTION__, isNeedUpdateI2C, isSlowMotionUpdateI2C);
m_pHal3A->postToAESenThread(MFALSE);
}
IAeMgr::getInstance().doPvAE(m_SensorDevId, m_pStateMgr->getFrameCount(), reinterpret_cast(rBufInfo.virtAddr),
m_pScheduler->jobAssignAndTimerStart(E_Job_AeFlare), 1,
m_pScheduler->isSlowMotion());
m_pScheduler->jobTimerEnd(E_Job_AeFlare);
if (isNeedUpdateI2C || isSlowMotionUpdateI2C)
{
MY_LOG_IF(fgLogEn, "[%s] postToAESenThread : ready to update I2C", __FUNCTION__);
m_pHal3A->postToAESenThread(MTRUE);
}
IspTuningMgr::GMA_AE_DYNAMIC_INFO dynamicInfo;
dynamicInfo.bStable = IAeMgr::getInstance().IsAEStable(m_SensorDevId);
IspTuningMgr::getInstance().sendIspTuningIOCtrl(m_SensorDevId, IspTuningMgr::E_ISPTUNING_SET_GMA_AE_DYNAMIC, (MINTPTR)&dynamicInfo, 0);
// workaround for iVHDR
MUINT32 u4AFSGG1Gain;
IAeMgr::getInstance().getAESGG1Gain(m_SensorDevId, &u4AFSGG1Gain);
IAfMgr::getInstance().setSGGPGN(m_SensorDevId, (MINT32) u4AFSGG1Gain);
MY_LOG_IF(fgLogEn, "[StateCameraPreview::sendIntent] doPvAE done\n" );
// update AWB
if (m_pScheduler->jobAssignAndTimerStart(E_Job_Awb))
IAwbMgr::getInstance().doPvAWB(m_SensorDevId, m_pStateMgr->getFrameCount(), bAEStable, i4AoeCompLv, reinterpret_cast(rBufInfo.virtAddr));
m_pScheduler->jobTimerEnd(E_Job_Awb);
MY_LOG_IF(fgLogEn, "[StateCameraPreview::sendIntent] doPvAWB done\n" );
return S_3A_OK;
} 这个函数也是长得不要不要的,它除了更新了AE、AWB参数外,还更新了其他图像参数,但这里只关注AE。乱七八糟的代码略过,看第22行doPvAE函数的实现
MRESULT AeMgr::doPvAE(MINT32 i4FrameCount, MVOID *pAEStatBuf, MINT32 i4ActiveAEItem, MUINT32 u4AAOUpdate, MBOOL bAAASchedule)
{
strAEInput rAEInput;
strAEOutput rAEOutput;
......
rAEInput.pAESatisticBuffer = pAEStatBuf;
rAEInput.eAeTargetMode = m_eAETargetMode;
if(m_pIAeAlgo != NULL) {
if(m_bRestoreAE == MFALSE) {
AaaTimer localTimer("handleAE", m_eSensorDev, (m_3ALogEnable & EN_3A_SCHEDULE_LOG));
m_pIAeAlgo->handleAE(&rAEInput, &rAEOutput);
localTimer.End();
copyAEInfo2mgr(&m_rAEOutput.rPreviewMode, &rAEOutput);
m_rAEOutput.rCaptureMode[0] = m_rAEOutput.rPreviewMode;
mPreviewMode = m_rAEOutput.rPreviewMode;
m_i4WaitVDNum = 0; // reset the delay frame
if((rAEInput.eAeState == AE_STATE_NORMAL_PREVIEW) || (rAEInput.eAeState == AE_STATE_ONE_SHOT)) {
m_bAEStable = rAEOutput.bAEStable;
m_bAEMonitorStable = m_bAEStable;
}
} else {
bRestore=1;
m_bRestoreAE = MFALSE;
MY_LOG("Restore AE, skip AE one time\n");
}
} else {
MY_LOG("[%s()] The AE algo class is NULL i4SensorDev = %d line:%d", __FUNCTION__, m_eSensorDev, __LINE__);
}
......
if ((i4ActiveItem & E_AE_AE_APPLY) || (bApplyAE == MTRUE)){ // apply AE
UpdateSensorISPParams(AE_AUTO_FRAMERATE_STATE);
}
......
return S_AE_OK;
}第13行,调用m_pIAeAlgo->handleAE函数计算AE相关的参数,包括曝光时间和亮度的Gain值
第19行,将得到的AE参数保存到mPreviewMode变量中
第36行,获取到AE参数之后调用UpdateSensorISPParams函数更新sensor和ISP的参数
MRESULT AeMgr::UpdateSensorISPParams(AE_STATE_T eNewAEState)
{
MRESULT err;
AE_INFO_T rAEInfo2ISP;
MUINT32 u4IndexRatio;
m_AEState = eNewAEState;
switch(eNewAEState)
{
case AE_INIT_STATE:
case AE_REINIT_STATE:
......
case AE_AUTO_FRAMERATE_STATE:
case AE_MANUAL_FRAMERATE_STATE:
if(m_pIAeAlgo != NULL) {
m_pIAeAlgo->getAEInfoForISP(rAEInfo2ISP, LIB3A_SENSOR_MODE_PRVIEW);
rAEInfo2ISP.i4GammaIdx = m_i4GammaIdx;
rAEInfo2ISP.i4LESE_Ratio = m_i4LESE_Ratio;
rAEInfo2ISP.u4SWHDR_SE = m_u4SWHDR_SE;
rAEInfo2ISP.u4MaxISO = m_u4MaxISO*m_rAEPLineLimitation.u4IncreaseISO_x100/100;
rAEInfo2ISP.u4AEStableCnt = m_u4StableCnt;
}
rAEInfo2ISP.u4Eposuretime = mPreviewMode.u4Eposuretime;
rAEInfo2ISP.u4AfeGain = mPreviewMode.u4AfeGain;
rAEInfo2ISP.u4IspGain = mPreviewMode.u4IspGain;
rAEInfo2ISP.u4EVRatio = m_rAEInitInput.rAEPARAM.pEVValueArray[m_eAEEVcomp];
if(m_i4WaitVDNum <= m_i4IspGainDelayFrames) {
if(m_i4WaitVDNum == m_i4ShutterDelayFrames) {
m_bSetShutterValue = MTRUE;
m_u4UpdateShutterValue = mPreviewMode.u4Eposuretime;
m_u4PrevExposureTime = mPreviewMode.u4Eposuretime;
}
if(m_i4WaitVDNum == m_i4SensorGainDelayFrames) {
m_bSetGainValue = MTRUE;
m_u4UpdateGainValue = mPreviewMode.u4AfeGain;
m_u4PrevSensorGain = mPreviewMode.u4AfeGain;
}
IspTuningMgr::getInstance().setIspFlareGainOffset((ESensorDev_T)m_eSensorDev, mPreviewMode.i2FlareGain, (-1*mPreviewMode.i2FlareOffset));
IspTuningMgr::getInstance().setAEInfo((ESensorDev_T)m_eSensorDev, rAEInfo2ISP);
if(m_i4WaitVDNum == m_i4IspGainDelayFrames) {
IspTuningMgr::getInstance().setISPAEGain((ESensorDev_T)m_eSensorDev, MFALSE, mPreviewMode.u4IspGain>>1);
m_AEState = eNewAEState;
}
}
break;
case AE_AF_STATE:
......
default:
break;
}
return S_AE_OK;
}第32-41行,把曝光时间和Gain值保存下来,后面会用到
第47行,将保存在mPreviewMode里的Gain值设置到Isp Tuning里面去,Isp Tuning的重点代码不开放,再往下跟已经没有意义了
还没结束,这里只更新了ISP的参数,并没有更新Sensor的参数
5.2 AESensorThreadLoop函数分析
之前提到有3个重点关注的线程,剩下最后一个了
MVOID*
Hal3A::AESensorThreadLoop(MVOID *arg)
{
......
// (2) thread-in-loop
while(1)
{
MY_LOG_IF(fgLogEn, "waitVsync start.");
_this->waitVSirq();
MY_LOG_IF(fgLogEn, "waitVsync done.");
......
MY_LOG_IF(fgLogEn, "[AESensorThreadLoop] updateSensorbyI2C start\n");
IAeMgr::getInstance().updateSensorbyI2C(_this->m_i4SensorDev);
MY_LOG_IF(fgLogEn, "[AESensorThreadLoop] updateSensorbyI2C end\n");
}
return NULL;
}和之前的AF线程一样,通过一个死循环不断去捕获中断。捕获到中断之后调用updateSensorbyI2C函数进行处理
MRESULT AeMgr::updateSensorbyI2C()
{
MINT32 err = S_AE_OK;
if(m_bSetFrameRateValue) { // update frame rate
m_bSetFrameRateValue = MFALSE;
AaaTimer localTimer("SetFrameRater", m_eSensorDev, (m_3ALogEnable & EN_3A_SCHEDULE_LOG));
err = AAASensorMgr::getInstance().setPreviewMaxFrameRate((ESensorDev_T)m_eSensorDev, m_u4UpdateFrameRate_x10, m_eSensorMode);
localTimer.End();
if (FAILED(err)) {
MY_ERR("AAASensorMgr::getInstance().setPreviewMaxFrameRate fail\n");
}
}
if((m_eAETargetMode == AE_MODE_AOE_TARGET) || (m_eAETargetMode == AE_MODE_MVHDR_TARGET)) { // mVHDR/iVHDR sensor control
......
} else { // normal control
if(m_bSetShutterValue) { // update shutter value
AaaTimer localTimer("SetSensorShutter", m_eSensorDev, (m_3ALogEnable & EN_3A_SCHEDULE_LOG));
err = AAASensorMgr::getInstance().setSensorExpTime((ESensorDev_T)m_eSensorDev, m_u4UpdateShutterValue);
localTimer.End();
m_bSetShutterValue = MFALSE;
if (FAILED(err)) {
MY_ERR("AAASensorMgr::getInstance().setSensorExpTime fail\n");
}
}
if(m_bSetGainValue) { // update sensor gain value
AaaTimer localTimer("SetSensorGain", m_eSensorDev, (m_3ALogEnable & EN_3A_SCHEDULE_LOG));
err = AAASensorMgr::getInstance().setSensorGain((ESensorDev_T)m_eSensorDev, m_u4UpdateGainValue);
err = AAASensorMgr::getInstance().setSensorIso((ESensorDev_T)m_eSensorDev, m_eSensorMode, m_rAEOutput.rPreviewMode.u4RealISO);
localTimer.End();
m_bSetGainValue = MFALSE;
if (FAILED(err)) {
MY_ERR("AAASensorMgr::getInstance().setSensorGain fail\n");
}
}
}
return S_AE_OK;
}第18-26行,更新设置sensor的快门打开时间,也就是曝光时间
第28-37行,更新设置sensor的亮度的Gain值
其中m_u4UpdateShutterValue 和m_u4UpdateGainValue的值都是在前面的UpdateSensorISPParams函数中设置
看下setSensorGain函数的实现
MRESULT
AAASensorMgr::
setSensorGain(MINT32 i4SensorDev, MUINT32 a_u4SensorGain)
{
MINT32 ret = S_AAA_SENSOR_MGR_OK;
......
// Set sensor gain
if(i4SensorDev == ESensorDev_Main) {
ret = m_pHalSensorObj->sendCommand(NSCam::SENSOR_DEV_MAIN, SENSOR_CMD_SET_SENSOR_GAIN, (MUINTPTR)&a_u4SensorGain, 0, 0);
} else if(i4SensorDev == ESensorDev_Sub) {
......
}
......
return (ret);
}MINT HalSensor::sendCommand(
MUINT sensorDevIdx,
MUINTPTR cmd,
MUINTPTR arg1,
MUINTPTR arg2,
MUINTPTR arg3)
{
switch (cmd) {
case SENSOR_CMD_SET_SENSOR_GAIN:
cmdId = CMD_SENSOR_SET_SENSOR_GAIN;
pSensorDrv->sendCommand((SENSOR_DEV_ENUM)sensorDevId,cmdId, arg1);
break;
......
return ret;
}MINT32
ImgSensorDrv::sendCommand(
SENSOR_DEV_ENUM sensorDevId,
MUINT32 cmd,
MUINTPTR arg1,
MUINTPTR arg2,
MUINTPTR arg3
)
{
switch (cmd) {
case CMD_SENSOR_SET_SENSOR_GAIN:
FeatureId = SENSOR_FEATURE_SET_GAIN;
FeaturePara[0] = *parg1; //from 10b to 6b base
FeaturePara[0] >>= 4;
FeatureParaLen = sizeof(MUINT64);
pFeaturePara = (MUINT8*)FeaturePara;
break;
......
err= featureControl((CAMERA_DUAL_CAMERA_SENSOR_ENUM)sensorDevId, FeatureId, (MUINT8*)pFeaturePara,(MUINT32*)&FeatureParaLen);
if (err < 0) {
LOG_ERR("[sendCommand] Err-ctrlCode (%s) \n", strerror(errno));
return -errno;
}
......
return err;
}MINT32
ImgSensorDrv::featureControl(
CAMERA_DUAL_CAMERA_SENSOR_ENUM InvokeCamera,
ACDK_SENSOR_FEATURE_ENUM FeatureId,
MUINT8 *pFeaturePara,
MUINT32 *pFeatureParaLen
)
{
ACDK_SENSOR_FEATURECONTROL_STRUCT featureCtrl;
MINT32 err = SENSOR_NO_ERROR;
......
featureCtrl.InvokeCamera = InvokeCamera;
featureCtrl.FeatureId = FeatureId;
featureCtrl.pFeaturePara = pFeaturePara;
featureCtrl.pFeatureParaLen = pFeatureParaLen;
err = ioctl(m_fdSensor, KDIMGSENSORIOC_X_FEATURECONCTROL , &featureCtrl);
if (err < 0) {
LOG_ERR("[featureControl] Err-ctrlCode (%s) \n", strerror(errno));
return -errno;
}
return err;
}最后调用到imgsensor_drv.cpp的featureControl函数,通过ioctl进入到kernel层,kernel层对应的sensor驱动会通过i2c设置sensor的寄存器
6. 总结
3A的初始化在DefaultCam1Device的onInit函数里面开始,主要就是初始化3A的状态管理并切换到init状态,创建了onThreadLoop 和AFThreadFunc两个线程。onThreadLoop是3A主线程,负责接收处理命令;AFThreadFunc负责实时更新AF参数
接收到PASS1_START_ISP事件之后,Hal3A会再创建一个AESensorThreadLoop线程负责实时更新sensor的AE参数,同时还会对AWB、AE、AF进行初始化,最后将3A状态切换到CameraPreview状态。
Pass1Node每deque一帧数据就会发出PASS1_EOF事件来更新3A,Hal3A接收到消息之后会计算ISP相关的参数并将得到的参数设置到Isp Tuning里面
当需要更新Sensor的参数时ISP会产生一个中断,而AFThreadFunc和AESensorThreadLoop则通过一个死循环不断去捕获中断,捕获到中断之后会让kernel层对应的驱动通过i2c设置相关的寄存器