PreScan传感器(三)——Lidar传感器
Lidar传感器会直接输出检测到的目标物,与TIS传感器类似,但Lidar传感器受特定技术的约束。
若要转载请注明出处:https://mp.csdn.net/console/editor/html/105689537
目录
1. 介绍
2. 操作原则
(1). 设备组成与信号解释
(2). 对接收信号进一步处理,得到Lidar到被测目标的距离
(3). 注意:遵循的假设条件
3. Lidar的配置
(1) Basic配置
(2) System配置
(3) Target & Medium配置
(4) Drift & Noise配置
4. Lidar在Simulink中的表示
1. 介绍
Lidar(Light Detection And Ranging)使用近红外光以800nm~2500nm的探测距离来识别目标。
2. 操作原则
(1). 设备组成与信号解释
基于激光测距的本质是对光源到目标然后返回到光束的飞行时间的测量,PreScan对两种操作原理进行建模:
- pulse time-of-flight ranging 脉冲飞行时间
- beam modulation telemetry 光束调制遥测
以上两个系统中,激光扫描仪设备都包含一个发射器和一个接收器:发射器发射窄光束(图1中的红色锥体表示),当光束撞击到物体时,一部分入射光束能量会反射(由代表半球形辐射方向图的红色箭头表示)。接收器位于激光附近(未显示),是一个光学系统,可以捕获从目标物体辐射回来的能量。

图1 lidar工作原理
(2). 对接收信号进一步处理,得到Lidar到被测目标的距离
为使信号处理系统能够计算距离,被测信号的功率必须足够大。特别地,SPR(specific power ratio)是描述接收器每单位面积接收到的发射功率的部分。SPR对确定lidar尺寸是有用的。
从发射器到目标物的路径中,光束以小角度传播(图中的角度要比实际光束宽的多),这种扩散导致强度随着距离的增加而降低,称为几何损失。光通过媒介时会发生被吸收或散射,导致路径损耗,且随着目标的距离而增加。天气设置不会自动影响结果,要通过折射率的设置来模拟天气的影响。
对目标自身而言,一部分能量被吸收另一部分发生反射(图中以小箭头表示),PreScan假设是均匀半球反射模式。
经过路径损失后,接收器测量入射光信号并从中推断有用信息。
(3). 注意:遵循的假设条件
这些假设条件在实际情况中是有效的:
- 散度顶点θ很小;
- 光束截面上的功率密度是均匀的;
- 目标物具有均匀的漫射半球反射。
3. Lidar的配置
(1) Basic配置
1) 扫描模式:主要有line scan, 'Z'scan和Matrix scan
具体内容见PreScan传感器(零)——通用配置
2) 扫描参数:
- Field of VIew(FoV) in Azimuth and Elevation:从最终左光束的外边缘到右光束的外边缘的角度(不是从中心计算的),可输入范围[-180,0]或[0,180].
- Number of Beams in Azimuth and Elevation:FoV中光束的个数,所有光束的中心线将根据FoV和光束数等距间隔。
- Horizontal/vertical scan:用户可定义的扫描方向。
- Capture frequency FoV:执行速率。
注:若在相对窄的FoV中配置较大的光束数,则2D viewer中不会显示所有光束数。根据经验,FoV是光束数的一半或更大则可以全显示,如25个光束数,FoV>=13度。
3) 光束特定设置:
光束范围:所有光束的有效范围,可在“Advanced tab”中设置光束方向指定范围。可输入的范围从最小检测范围(默认0.5m,可在Experiment->General Settings->Sensors更改)到1000m.
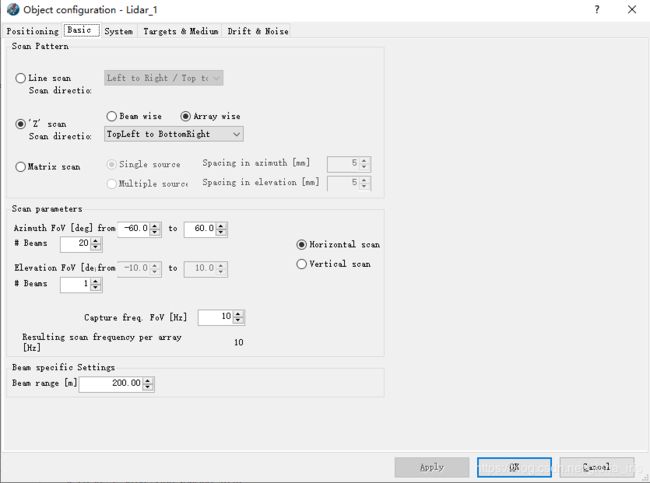
图2 Lidar传感器的Basic tag页面配置
(2) System配置
- 波长参数:确定隐式模式下大气衰减的级别,如“Targets & Medium"配置所展示;
- 发散角: 定义光束发散的角度,对于Laser应用,发散角度通常为0.01~0.08度;
- 最大输出目标:设置Lidar输出的数据集数。若检测到的个数大于n,仅报告最近的n个目标(不按距离排序)。可输入的最大值为5.
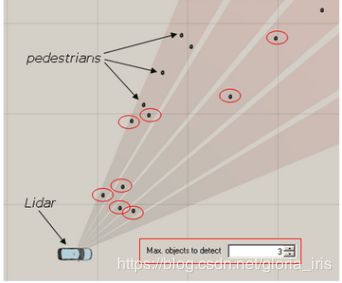
图3 最大输出=3时,每个光束检测到的行人(黑点),输出的行人(红色椭圆圈包围的黑点)
分辨率配置:将空间细分为分辨率单元;分辨率单元是空间中的一个体积,该体积中所有检测都将产生相同的传感器读数;分辨率单元由水平角度、垂直角度和距离确定,所以该参数对传感器输出进行了量化处理。

图4 System tag配置页面
(3) Target & Medium配置
“显示”模式下,可指定“透射系数";”隐式“模式下,衰减由图中显示的功能定义,该图显示了波长与大气衰减之间的关系。System Tab中波长是隐式模式。
注意:数据是在相对干燥的环境中进行测量的,当空气事度像热带一样增加时,传输可能会严重恶化,Presscan不考虑湿度影响。天气设置不会影响结果,要通过折射率来模拟天气的影响。
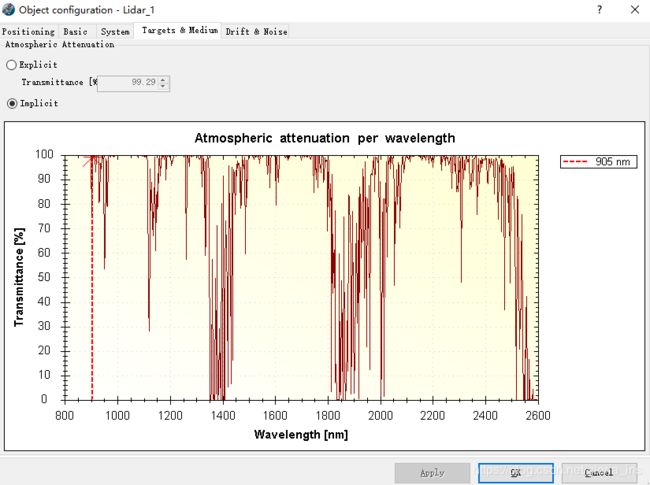
图5 Target&Medium tag配置页面
(4) Drift & Noise配置
在Drift tab中,可选择零均值高斯和单向漂移类型;在Noise tab中,可输入类似的信号。
两者的区别在于:
Noise tab可以定义哪个噪声量分配给start of the illumination path('x%'),另一部分分配给start of the reflection path('100-x%')。
start of the illumination path的噪声是beam中的几何噪声,会影响beam的方向;end of the illumination path的噪声是测量噪声,应用于测量数据。
相同的drift可用于所有beams(相关);noise应用在不同beams且不相关。
此外,噪声叠加的方式可进行选择,相加或相乘。
| 相加 | value=nominal value + n |
| 相乘 | value=nominal value *(1+n) |
其中,噪声项n是标准差为s的零均值高斯分布值。

图6 Drift&Noise的配置页面
4. Lidar在Simulink中的表示
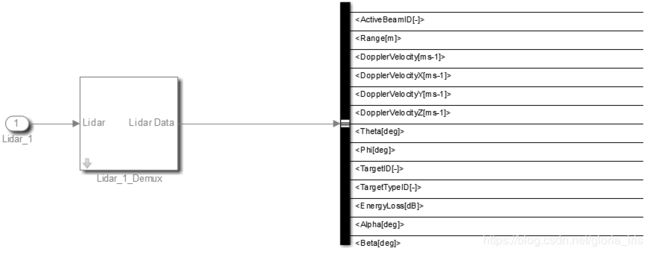
图7 lidar在simulink中的表示及Bus选择的一些信号
Lidar的Demux模块输出的信号及具体描述:
| ActiveBeamID(-) | 当前模拟时间光束的ID,未检测到值为0 |
| Range(m) | 检测到的目标距离 |
| DopplerVelocity(m/s) | 相对于传感器的目标点沿光束的速度 |
| DopplerVelocityX/Y/X(m/s) | 速度分解到传感器XYZ坐标系 |
| Theta(deg) | 目标物在传感器坐标系的azimuth角度 |
| Phi(deg) | 目标物在传感器坐标系的elevation角度 |
| TartgetID(-) | 被测目标物的索引ID |
| TargetTypeID(-) | 被测目标物的类型ID |
| EnergyLoss(dB) | 接收功率/发射功率比 |
| Alpha(deg) | lidar对目标的azimuthal角 |
| Elevation(deg) | lidar对目标的elevation角 |
bus上所有信号的维数:时间步长内的活动光束个数*输出目标的最大数,其中活动光束的数量取决于Basic Tab的配置,输出目标的最大数在Sstem Tab中设置。其中TargetTypeID具体解释见PreScan传感器(零)——通用配置的第三部分。