Graph Convolutional Networks 图卷积网络
Semi-Supervised Classification with Graph Convolutional Networks 基于图卷积网络的半监督分类
原文:https://arxiv.org/abs/1609.02907
参考:https://blog.csdn.net/w986284086/article/details/80270653
DGL 实现:https://docs.dgl.ai/tutorials/models/1_gnn/1_gcn.html
DGL 实现(ZACHARY空手道俱乐部网络): https://docs.dgl.ai/tutorials/basics/1_first.html
Graph and “Zachary’s karate club” problem

图的基本概念
- 顶点(vertex)
- 边(edge)
- 有向/无向图(Directed Graph / Undirected Graph)
- 边的权重(weight)
- 路径/最短路径(path / shortest path)
空手道俱乐部数据集
- 顶点:一个俱乐部成员
- 边:成员之间在俱乐部以外的关系
- 无向,所有权重相同
- 问题:以教练(0)和主席(33)两个人为首,将整个俱乐部分为两个派别
对一个节点的卷积
-
与某节点相邻的所有节点,对所有特征向量求和,表示为:
-
线性+非线性变换:
Graph Attention Networks 图注意力网络
原文:https://arxiv.org/abs/1710.10903
参考:https://www.cnblogs.com/chaoran/p/9720708.html
参考:https://www.cnblogs.com/wangxiaocvpr/p/7889307.html
参考:https://blog.csdn.net/b224618/article/details/81407969
DGL 实现:https://github.com/dmlc/dgl/tree/master/examples/pytorch/gat
线性变换
所有 node 共用一个 W 作 feature 的线性变换,变换后 F 和 F‘ 可以不同
N 为node 数量, F 为每个node 的 feature 数(feature vector 长度)
-
输入:
-
输出:
计算 attention coefficients
表示 node j 的 feature 对 node i 的重要性:

函数a:一个单层前馈网络 torch.bmm(head_ft, self.attn_l)
卷积

多头注意力
设置 K 个函数,计算出 K 组attention coefficient,连接K个输出:

对于最后一个卷积层,连接改为求平均:

Modeling Relational Data with Graph Convolutional Networks
原文:https://arxiv.org/abs/1703.06103
参考:https://lanzhuzhu.github.io/2017/04/30/IE/RelationExtraction/Modeling%20Relational%20Datawith%20Graph%20Convolutional%20Networks/
DGL 实现:https://docs.dgl.ai/tutorials/models/1_gnn/4_rgcn.html
普通GCN(本文第一种)利用图的结构来提取每个节点的特征,没有利用图的边。知识图谱以三元组(主体、客体和主客体之间的关系)为单位组成,因此图的边编码了重要的关系信息。而且每对节点之间可能存在多条边(对应多种关系)。
在统计关系学习(statistical relational learning, SRL)中,有两种任务,都需要从图的相邻结构中恢复丢失的信息:
- 实体分类(Entity classification),例如将实体分为某种类别,并赋予该类别中的一些特征
- 连接预测(Link prediction),例如推断某个缺失的三元组
例如知道了“小明在北京大学读书”,就能知道“小明”应该被归类为“人类”,而且知识图谱中一定有(小明,住在,中国)这样一个三元组。
R-GCN用一个图卷积网络同时解决了上述两种问题:
- 实体分类:每个节点最后使用softmax输出
- 连接预测:利用自编码器结构重建图的边
回忆一下,普通GCN的卷积操作如下:

R-GCN的卷积操作如下:

其区别在于R-GCN中,通往一个节点的不同边可以代表不同的关系。在普通GCN中,所有边共享相同的权重 W ;在R-GCN中,不同类型的边(关系)使用不同的权重 Wr ,只有同一种边(关系)才会使用同一个权重。
“不同关系对应不同权重”的做法大大增加了模型的参数量,原文使用了基分解(basis decomposition)来降低参数量和防止过拟合:

此处的 V 为基, a 为coefficient,基的数目 B 远小于数据中的关系数目
Supervised Community Detection with Line Graph Neural Networks
原文:https://arxiv.org/abs/1705.08415
DGL 实现:https://docs.dgl.ai/tutorials/models/1_gnn/6_line_graph.html
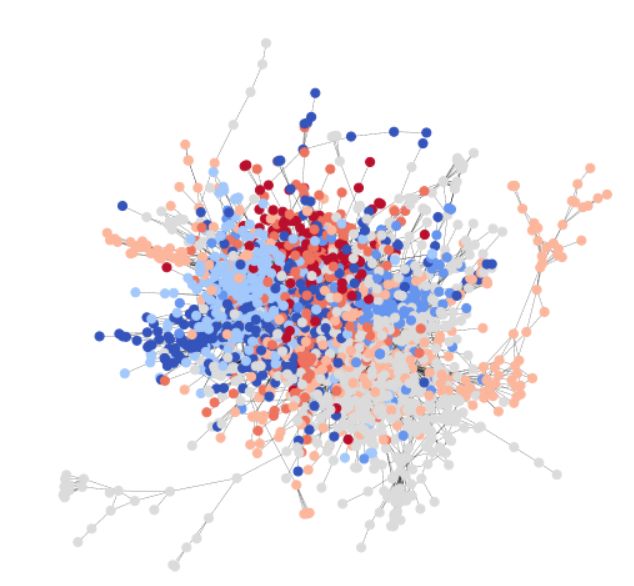
开头的GCN完成了对每个节点的分类,这里的LGNN则是对图中的节点进行聚类(“社区发现”,community detection)。这个模型的一个亮点在于将普通GCN应用在线图(line graph)中
CORA:科技论文数据集
- 节点:2708篇论文,分为7个不同机器学习领域
- 有向边:论文之间的引用关系
-
问题:通过监督学习对论文进行分类
线图
将一个老图的边,作为一个新图的节点,画出来的图。下图中的蓝点和黑线是一个老有向图,红点既是老图的边、也是新图的节点。将相邻的红点按老边的方向有方向地连起来,就得到一个线图。

LGNN(这里的计算我没有看懂)
在LGNN中有若干层,每一层的图(x)和其线图(y)在数据流中的变化过程如下图:

在图表征(x)中,第 k 层、第 l 个通道的第 i 个节点按以下公式进行 k+1 层的更新:

类似地,线图(y)中的运算为:

等号的右边可分为五部分:
-
x的线性变换
-
a linear projection of degree operator ( linear map D:F→DF where (Dx)i:=deg(i)·xi, D(x) =diag(A1)x .)on x,
-
a summation of 2j adjacency operator (linear map given by the adjacency matrix Ai,j= 1if f(i,j)∈E.) on x
-
fusing another graph’s embedding information using incidence matrix {Pm,Pd}, followed with a linear projection
-
skip-connection:将前面的非线性函数ρ换为线性变换
Stochastic Steady-state Embedding (SSE)
原文:http://proceedings.mlr.press/v80/dai18a/dai18a.pdf
DGL 实现:https://docs.dgl.ai/tutorials/models/1_gnn/8_sse_mx.html
Flood-fill / Infection algorithm(Steady-state algorithms)
在图 G=(V,E) 中,有 起始节点 s ∈ V,
设 V = {1,...,n},yv 为节点 v 是否被标记,N(v) 为 v 的所有相邻节点(包括v本身)
对图中可以到达 s 的所有节点进行标记:

当(2)迭代足够次数后,所有可以到达 s 的节点都被标记,我们说达到了稳态(steady state)
Steady-state operator
上述过程可抽象为:

其中
![]()
![]()
在 flood-fill 算法中,T^=max
因为当且仅当 y∗=T(y∗) 时,y 在 T 下达到稳态,所以称 T 为 steady-state operator
Neural flood-fill algorithm(Steady-state embedding)
用神经网络模拟 flood-fill algorithm
- 用图神经网络 TΘ ,来代替 T
- 用向量 hv(维度为H),来代替 布尔值yv
- 为节点 v 赋予一个特征向量 xv(在 flood-fill 算法中,xv为每个节点编号的 one-hot code,用于区分不同节点)
- 只迭代有限次数,不一定达到稳态
- 迭代结束后,以 hv 为输入,每个节点可以被到达的概率为输出,训练另一个神经网络
上述过程可写成:
