dyld------
- dyld加载所有的库和可执行文件
- dyld加载流程
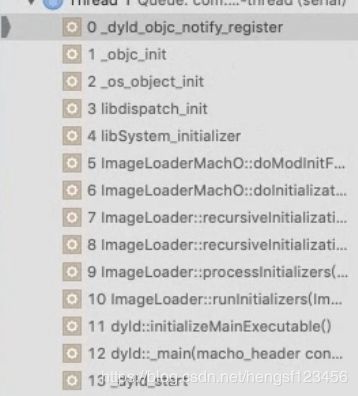
- 程序执行从_dyld_start 开始
- 进入dyld:main函数
- 配置一些环境变量(DYLD_PRINT_OPTS || DYLD_PRINT_ENV)
- 加载共享缓存(一开始就判断是否禁用,ios无法被禁用)
- 实力化主程序
- 加载动态库
- 链接主程序,执行符号替代
- 最关键的地方:初始化方法
- 该函数会执行一个回调
- 通过断点调试: _objc_init初始化的时候赋值的一个函数load_images
- load_images里面执行call_load_methods函数
- call_load_methods函数循环调用各种load方法
- load_images里面执行call_load_methods函数
doModInitFunctions函数
- 内部会调用 _atrribute__((constructor))的c函数
返回主程序的入口函数。开始主程序的main函数
dyld:main函数
uintptr_t
_main(const macho_header* mainExecutableMH, uintptr_t mainExecutableSlide,
int argc, const char* argv[], const char* envp[], const char* apple[],
uintptr_t* startGlue)
{
.....
}配置一些环境变量
if ( sEnv.DYLD_PRINT_OPTS )
printOptions(argv);
if ( sEnv.DYLD_PRINT_ENV )
printEnvironmentVariables(envp);加载共享缓存
// load shared cache
checkSharedRegionDisable((dyld3::MachOLoaded*)mainExecutableMH, mainExecutableSlide);实力化主程序
sMainExecutableMachHeader = mainExecutableMH;//主程序的MachO的头
sMainExecutableSlide = mainExecutableSlide;//主程序的ASLR值
CRSetCrashLogMessage("dyld: launch started");
//设置上下文信息
setContext(mainExecutableMH, argc, argv, envp, apple);
加载动态库
if ( sEnv.DYLD_INSERT_LIBRARIES != NULL ) {
for (const char* const* lib = sEnv.DYLD_INSERT_LIBRARIES; *lib != NULL; ++lib)
loadInsertedDylib(*lib);
}链接主程序,执行符号替代
link(sMainExecutable, sEnv.DYLD_BIND_AT_LAUNCH, true, ImageLoader::RPathChain(NULL, NULL), -1);
sMainExecutable->setNeverUnloadRecursive();
if ( sMainExecutable->forceFlat() ) {
gLinkContext.bindFlat = true;
gLinkContext.prebindUsage = ImageLoader::kUseNoPrebinding;
}
// link any inserted libraries
// do this after linking main executable so that any dylibs pulled in by inserted
// dylibs (e.g. libSystem) will not be in front of dylibs the program uses
if ( sInsertedDylibCount > 0 ) {
for(unsigned int i=0; i < sInsertedDylibCount; ++i) {
ImageLoader* image = sAllImages[i+1];
link(image, sEnv.DYLD_BIND_AT_LAUNCH, true, ImageLoader::RPathChain(NULL, NULL), -1);
image->setNeverUnloadRecursive();
}
// only INSERTED libraries can interpose
// register interposing info after all inserted libraries are bound so chaining works
for(unsigned int i=0; i < sInsertedDylibCount; ++i) {
ImageLoader* image = sAllImages[i+1];
image->registerInterposing(gLinkContext);
}
}
void ImageLoader::link(const LinkContext& context, bool forceLazysBound, bool preflightOnly, bool neverUnload, const RPathChain& loaderRPaths, const char* imagePath)
{
。。。
// 循环绑定动态库
this->recursiveLoadLibraries(context, preflightOnly, loaderRPaths, imagePath);
context.notifyBatch(dyld_image_state_dependents_mapped, preflightOnly);
// we only do the loading step for preflights
if ( preflightOnly )
return;
uint64_t t1 = mach_absolute_time();
context.clearAllDepths();
this->recursiveUpdateDepth(context.imageCount());
__block uint64_t t2, t3, t4, t5;
{
dyld3::ScopedTimer(DBG_DYLD_TIMING_APPLY_FIXUPS, 0, 0, 0);
t2 = mach_absolute_time();
this->recursiveRebase(context);
context.notifyBatch(dyld_image_state_rebased, false);
t3 = mach_absolute_time();
if ( !context.linkingMainExecutable )
// 绑定对应的符号表
this->recursiveBindWithAccounting(context, forceLazysBound, neverUnload);
t4 = mach_absolute_time();
if ( !context.linkingMainExecutable )
this->weakBind(context);
t5 = mach_absolute_time();
}
。。。
}最关键的地方:初始化方法
// run all initializers
initializeMainExecutable();
||
// run initializers for main executable and everything it brings up
sMainExecutable->runInitializers(gLinkContext, initializerTimes[0]);
||
processInitializers(context, thisThread, timingInfo, up);
||
for (uintptr_t i=0; i < images.count; ++i) {
images.images[i]->recursiveInitialization(context, thisThread, images.images[i]->getPath(), timingInfo, ups);
}
全局搜索 recursiveInitialization
void ImageLoader::recursiveInitialization(const LinkContext& context, mach_port_t this_thread, const char* pathToInitialize,
InitializerTimingList& timingInfo, UninitedUpwards& uninitUps)
{
...
context.notifySingle(dyld_image_state_dependents_initialized, this, &timingInfo);
...
}
// notifySingle
static void notifySingle(dyld_image_states state, const ImageLoader* image, ImageLoader::InitializerTimingList* timingInfo)
{
....
(*sNotifyObjCInit)(image->getRealPath(), image->machHeader());
...
}
// sNotifyObjCInit
void registerObjCNotifiers(_dyld_objc_notify_mapped mapped, _dyld_objc_notify_init init, _dyld_objc_notify_unmapped unmapped)
{
// record functions to call
sNotifyObjCMapped = mapped;
sNotifyObjCInit = init;
sNotifyObjCUnmapped = unmapped;
}
// _dyld_objc_notify_init
void _dyld_objc_notify_register(_dyld_objc_notify_mapped mapped,
_dyld_objc_notify_init init,
_dyld_objc_notify_unmapped unmapped)
{
dyld::registerObjCNotifiers(mapped, init, unmapped);
}
打断点 _dyld_objc_notify_register
因为我们要看上一个函数传的参数,所以在objc源码中搜索_objc_init(,
void _objc_init(void)
{
static bool initialized = false;
if (initialized) return;
initialized = true;
// fixme defer initialization until an objc-using image is found?
environ_init();
tls_init();
static_init();
lock_init();
exception_init();
_dyld_objc_notify_register(&map_images, load_images, unmap_image);
}参数为load_images
void
load_images(const char *path __unused, const struct mach_header *mh)
{
// Return without taking locks if there are no +load methods here.
if (!hasLoadMethods((const headerType *)mh)) return;
recursive_mutex_locker_t lock(loadMethodLock);
// Discover load methods
{
mutex_locker_t lock2(runtimeLock);
prepare_load_methods((const headerType *)mh);
}
// Call +load methods (without runtimeLock - re-entrant)
call_load_methods();
}在这个函数里面调用了主程序所有的load方法。