【分析】Ceph文件系统修复机制cephfs-data-scan(2)
前述章节已经介绍过,ceph-data-scan是通过函数data_scan.main(args)解析并执行用户命令的。本章节主要介绍data_scan
=========================
作者:Younger Liu,
本作品采用知识共享署名-非商业性使用-相同方式共享 3.0 未本地化版本许可协议进行许可。
本文链接地址为:http://blog.csdn.net/younger_china/article/details/76718726
=========================
作者:Younger Liu,
本作品采用知识共享署名-非商业性使用-相同方式共享 3.0 未本地化版本许可协议进行许可。
本文链接地址为:http://blog.csdn.net/younger_china/article/details/76718726
=========================
1. ceph-scan-data的用法通过代码来看,如下:
std::cout << "Usage: \n" << " cephfs-data-scan init [--force-init]\n" << " cephfs-data-scan scan_extents [--force-pool] [--worker_n N --worker_m M] \n" << " cephfs-data-scan scan_inodes [--force-pool] [--force-corrupt] [--worker_n N --worker_m M] \n" << " cephfs-data-scan pg_files<< " cephfs-data-scan scan_links\n" << "\n" << " --force-corrupt: overrite apparently corrupt structures\n" << " --force-init: write root inodes even if they exist\n" << " --force-pool: use data pool even if it is not in FSMap\n" << " --worker_m: Maximum number of workers\n" << " --worker_n: Worker number, range 0-(worker_m-1)\n" << "\n" << " cephfs-data-scan scan_frags [--force-corrupt]\n" << " cephfs-data-scan cleanup \n" << std::endl; generic_client_usage(); } [ ...]\n"
2. 参数解析
(1) 判断参数个数,参数个数至少为1,否则datascan是无法理解用户想做什么的.
if (args.size() < 1) { usage(); return -EINVAL; }
(2)通用RADOS初始化,及初始化全局变量g_ceph_context
g_ceph_context是CephContext *的类型,
// Common RADOS init: open metadata pool // ===================================== librados::Rados rados; int r = rados.init_with_context(g_ceph_context); if (r < 0) { derr << "RADOS unavailable" << dendl; return r; }
(3) 通过for循环,依次解析每一个参数,在解析过程中会验证各个参数,然后以全局变量进行标识
for (std::vector::const_iterator i = args.begin() + 1; i != args.end(); ++i) { ......
(4) 检查namespace,如果没有指定并且本地只有一个,则选择这一个,否则报错
// If caller didn't specify a namespace, try to pick // one if only one exists if (fscid == FS_CLUSTER_ID_NONE) { if (fsmap->filesystem_count() == 1) { fscid = fsmap->get_filesystem()->fscid; } else { std::cerr << "Specify a filesystem with --filesystem" << std::endl; return -EINVAL; } } auto fs = fsmap->get_filesystem(fscid); assert(fs != nullptr);
(5) 如果没有初始化output目录,则初始化为MetadataDriver(),否则初始化为LocalFileDriver()
// Default to output to metadata pool if (driver == NULL) { driver = new MetadataDriver(); driver->set_force_corrupt(force_corrupt); driver->set_force_init(force_init); dout(4) << "Using metadata pool output" << dendl; }
3. 相关初始化
(1) 与Rados建立通信联系
dout(4) << "connecting to RADOS..." << dendl; r = rados.connect(); if (r < 0) { std::cerr << "couldn't connect to cluster: " << cpp_strerror(r) << std::endl; return r; }
(2) 初始化driver
r = driver->init(rados, metadata_pool_name, fsmap, fscid); if (r < 0) { return r; }
接下来是对用户的各种操作分析
4. init操作分析
当用户输入命令如下命令
# cephfs-data-scan init [--force-init]
1.解析参数
当进入data_scan.main中时,首先会解析参数,当解析到--force-init时,会设置全局变量force_init=true
if (arg == "--force-pool") { ... } else if (arg == "--force-init") { force_init = true; return true; } else { return false; }
2. 初始化
然后会初始化fs、 driver,与rados建立通信联系
3. 执行init操作
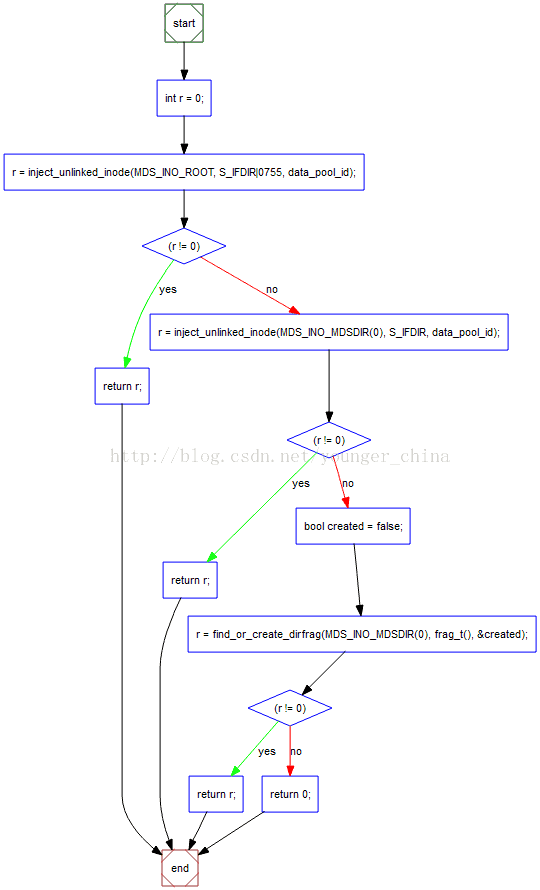
然后调用init_rootfs来初始化
// Finally, dispatch command if (command == "scan_inodes") { .... } else if (command == "init") { return driver->init_roots(fs->mds_map.get_first_data_pool()); } else { std::cerr << "Unknown command '" << command << "'" << std::endl; return -EINVAL; }
MetadataDriver->init_rootfs
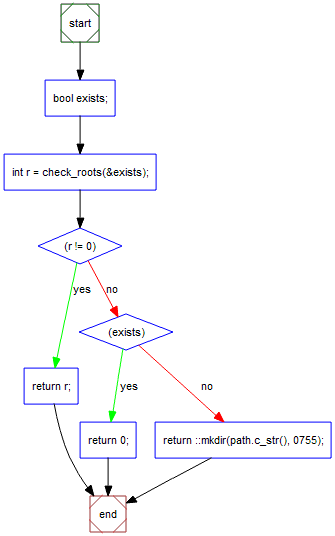
LocalFileDriver->init_rootfs
=========================
作者:Younger Liu,
本作品采用知识共享署名-非商业性使用-相同方式共享 3.0 未本地化版本许可协议进行许可。
本文链接地址为:http://blog.csdn.net/younger_china/article/details/76718726
=========================