图像处理【1】空间金字塔Lucas Kanade光流法
论文 Pyramidal Implementation of the Lucas Kanade Feature Tracker Description of the algorithm的阅读笔记。
光流法用途比较多,比如跟踪,图像配准,以及在三维人脸重建中的稠密对应。
问题描述
假设 I , J 是两张2D灰度图片, I(x)=I(x,y) , J(x)=J(x,y) 分别为坐标 x=[x,y] 上的像素值。
考虑图像 I 上的一点 u=[ux,uy]T ,那么特征跟踪的目的是在图像 J 找到点 v=u+d=[ux+dx,uy+dy]T ,使得 I(u) , J(v) 尽可能的一样。 d=[dx,dy]T 是图像在点 x 上的速度,也称光流。点 d 的求解定义在一个比较小的邻域内,通常是5*5。整个问题的表示可以用,求解以下损失函数:
其中邻域定义为 (2wx+1)∗(2wy+1) 。该损失函数的成立条件是,在同一个邻域内的点的光流是一样的。
算法
标准的光流法在处理运动幅度大的图片时,会出现问题。尽管可以使用大的窗口,但是大窗口会影响局部准确率。而基于图片空间金字塔的Lucas-Kanade则能够很好的处理该问题。
1、图片金字塔
图片金字塔是通过在原始图片上获取不同的分辨率而得到的。比如原始图片为1000*1000,金字塔有三层L=3,则最后的金字塔图片分辨率有:L0:1000*1000,L1:500*500,L2:250*250,L3:125*125。在缩小图片时,位置为x,y的像素值采用滤波的方式获取,如第L层中x,y的像素重第L-1层中的2x,2y坐标的领域获取:

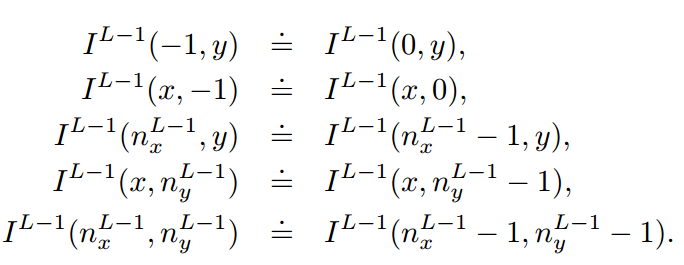
这里边还要处理边界问题, nx , ny 分别是图片的最大长宽。超出边界的像素值用边界值代替:
2、金字塔特征跟踪
求解最终的 d ,是通过从图像金字塔的最高层开始,也就是分辨率最低的图片,然后一直递归求解到原始图片。我们假设,第L层的损失函数为:

其中 gLx , gLy 是已知的用如下公式获取:
该公式是一个递归的过程,最高层的g=[0,0],d则是利用标准的lucas-Kanade算法求解出来。
因此最终的
d=∑LmL=02LdL 。
3、迭代Lucas-Kanade算法
第L层中在以 [px,py] 为中心的邻域里点[x,y]的值可由下面的公式获取:

令 v⎯⎯=[vx,vy]T=dL ,则损失函数重写为:

为了最小化损失函数,我们有:

将 B(x+vx,y+vy) 进行泰勒展开,则有:

同时令:


得出:
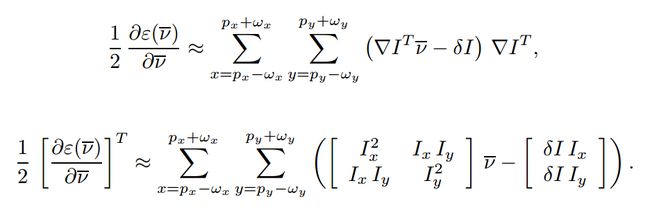
令:

最终可解出v:


以上是标准的Lucas-Kanade算法。
现在说一下迭代的Lucas-Kanade算法。
算法的主要思想是,在第k次迭代算法出v时;第k+1次的求解也是使用标准的Lucas-Kanade算法,只不过需要更新一下图像B的在点 [px,py] 上的邻域:

最终的v:

整个算法的推导大致是这样的。论文剩下的是算法的流程,以及一些细节处理,如亚像素计算。