Arduino UNO数据手册(新手入门)

概述
Arduino UNO是基于ATmega328P的Arduino开发板。它有14个数字输入/输出引脚(其中6个可用于PWM输出)、6个模拟输入引脚,一个16 MHz的晶体振荡器,一个USB接口,一个DC接口,一个ICSP接口,一个复位按钮。它包含了微控制器所需的一切,你只用简单地把它连接到计算机的USB接口,或者使用AC-DC适配器,再或者用电池,就可以驱动它。
“Uno” 在意大利语中意思是“一”。Arduino UNO是Arduino系列的一号开发板,Arduino IDE 1.0是Arduino IDE的第一个正式版本,Arduino UNO硬件和Arduino IDE软件建立了一套Arduino开发标准,此后的Arduino开发板和衍生产品都是在这个标准上建立起来的
技术参数
| 型号 | Arduino UNO |
|---|---|
| 微控制器 | ATmega328P |
| 工作电压 | 5 V |
| 输入电压(推荐) | 7-12 V |
| 输入电压(极限) | 6-20 V |
| 数字I/O引脚 | 14 |
| PWM通道 | 6 |
| 模拟输入通道(ADC) | 6 |
| 每个I/O直流输出能力 | 20 mA |
| 3.3V端口输出能力 | 50 mA |
| Flash | 32 KB(其中引导程序使用0.5 KB) |
| SRAM | 2 KB |
| EEPROM | 1 KB |
| 时钟速度 | 16 MHz |
| 板载LED引脚 | 13 |
| 长度 | 68.6 mm |
| 宽度 | 53.4 mm |
| 重量 | 25 g |
编程
可通过Arduino IDE对Arduino UNO编程。
在Arduino UNO使用ATmega328 芯片上,存储有bootloader程序,使得用户可以上传程序到开发板上,而不需要使用额外的编程器。这个上传程序的过程使用STK500协议完成。
你也可以不使用bootloader,通过ICSP接口连接编程器给Arduino UNO上传程序。
注意事项
Arduino Uno上有一个自恢复保险丝,当短路或过流时,电流超过500mA,其可以自动断开供电,从而保护计算机的USB端口和Arduino。虽然大多数计算机USB端口都提供了内部保护,但是此保险丝可以提供了额外的保护。
电源
可以通过USB口或者直流电源座给Arduino Uno供电。Arduino UNO带有自动切换电源功能。
电源引脚如下:
Vin
电源输入引脚。当使用外部电源通过DC电源座供电时,这个引脚可以输出电源电压。
5V
5V电源引脚。使用USB供电时,直接输出USB提供的5V电压;使用外部电源供电时,输出稳压后的5V电压。
3V3
3.3V 电源引脚。最大输出能力为50 mA。
GND
接地引脚
IOREF
I/O参考电压。其他设备可通过该引脚识别开发板I/O参考电压。
存储空间
ATmega328 有32KB Flash存储空间(其中0.5KB被用于存储bootloader),2KB 的SRAM和1KB 的EEPROM。
可以使用官方提供的EEPROM库读写EEPROM空间。
输入输出
Arduino Uno有14个数字输入输出引脚,可使用 pinMode()、digitalWrite() 和 digitalRead() 控制。
其中一些带有特殊功能,这些引脚如下
Serial
0(RX)、1(TX),被用于接收和发送串口数据。这两个引脚通过连接到ATmega16u2来与计算机进行串口通信。
外部中断
2、3,可以输入外部中断信号。中断有四种触发模式:低电平触发、电平改变触发、上升沿触发、下降沿触发。
PWM输出:
3、5、6、9、10、11,可用于输出8-bit PWM波。对应函数 analogWrite() 。
SPI:
10(SS)、11(MOSI)、12(MISO)、13(SCK),可用于SPI通信。可以使用官方提供的SPI库操纵。
L-LED:
13。13号引脚连接了一个LED,当引脚输出高电平时打开LED,当引脚输出低电平时关闭LED。
TWI:
A4(SDA)、A5(SCL)和TWI接口,可用于TWI通信,兼容I²C通信。可以使用官方提供的Wire库操纵。
Arduino Uno 6个模拟输入引脚,可使用analogRead()读取模拟值。每个模拟输入都有10位分辨率(即1024个不同的值)。默认情况下,模拟输入电压范围为0~5V,可使用 AREF引脚和analogReference()函数设置其他参考电压。
相关引脚如下:
AREF:
模拟输入参考电压输入引脚。
Reset:
复位端口。接低电平会使Arduino复位,复位按键按下时,会使该端口接到低电平,从而让Arduino复位。
指示灯(LED)
Arduino UNO带有4个LED指示灯,作用分别如下:
ON:
电源指示灯。当Arduino通电时,ON灯会点亮。
TX:
串口发送指示灯。当使用USB连接到计算机且Arduino向计算机传输数据时,TX灯会点亮。
RX:
串口接收指示灯。当使用USB连接到计算机且Arduino接收到计算机传来的数据时,RX灯会点亮
L:
可编程控制指示灯。该LED通过特殊电路连接到Arduino的13号引脚,当13号引脚为高电平或高阻态时,该LED 会点亮;低电平时,不会点亮。可以通过程序或者外部输入信号,控制该LED亮灭。
通信
Arduino UNO具备多种通信接口,可以和计算机、其他Arduino或者其他控制器通信。
ATmega328 提供了UART TTL (5V)串口通信,其位于0 (RX) 和1 (TX)两个引脚上。Uno上的ATmega16U2会在计算机上模拟出一个USB串口,使得ATmega328 能和计算机通信。Arduino IDE提供了串口监视器,使用它可以收发简单文本数据。Uno上的RX\TX两个LED可以指示当前Uno的通信状态。
SoftwareSerial库可以将Uno的任意数字引脚模拟成串口,从而进行串口通信。
ATmega328也支持I2C (TWI)和SPI通信。Arduino IDE自带的Wire库,可用于驱动I2C总线,自带的SPI库,可用于SPI通信。
自动复位
一些开发板在上传程序前需要手动复位,而Arduino Uno的设计不需要如此,在Arduino Uno连接电脑后可以由程序控制其复位。在ATmega16U2上的DTR信号端,经过一个100nf 的电容,连接到ATmega328 的复位引脚。
当计算机发出DTR信号时(低电平),复位端将得到一个足够长的脉冲信号,从而复位ATmega328。在Arduino IDE中点击上传程序,在上传前即会触发复位,从而运行引导程序,完成程序上传。
知识拓展
ICSP接口介绍
ICSP(In-Circuit Serial Programming)接口为在线程序烧录接口,其在arduino 系列电路板上为一个2*3的排针端子,6根排针与Arduino 电路板上的单片机相连接,分别对应 5V,MISO,MOSI,SCK,GND 和 RESET,具体顺序如下图所示。
其中MISO,MOSI,SCK为Arduino SPI 接口。
有些人认为ICSP接口为Arduino的SPI接口,我认为这种说法是不正确的。SPI接口应为MISO,MOSI,SCK及SS接口,在ICSP中并没有包含SS接口,而且ICSP接口中包含RESET复位引脚,方便进行程序的烧写。所以我认为ICSP接口兼容SPI连接较为合适。
SPI通信简介
SPI全称Serial Peripheral Interface,即串行外设接口。
由Motorola公司提出的一种同步串行数据传输标准。
所谓同步,即数据收发双方共用一个时钟;
所谓串行,即待传输的数据排成一行,一位一位地传送出去。
主要用于微控制器与其他外围设备,
如EEPROM、Flash、AD转换器等之间的短距离传输,
当然也可实现微控制器与微控制器间的数据传输。
相比于其它通信协议,
SPI采用四线制的硬件连接方式,
结合四种信号间的时序关系,
共同构成了SPI通信的语法!

Arduino Uno就是通过上图中D10~D13对应的SS、MOSI、MISO、SCK四个接口实现SPI通信。
四个接口的定义如下:

SPI协议决定了可以有多个从机,但只能存在一个主机,主机通过从机选择线来确定当前要通信的从机。
SPI通信的硬件连接
一主一从
这是最简单的SPI通信方式,由于主机和从机的角色是固定不变的,可以将主机的SS端接高电平,将从机的SS端固定接地。其它信号一一对应连接即可。

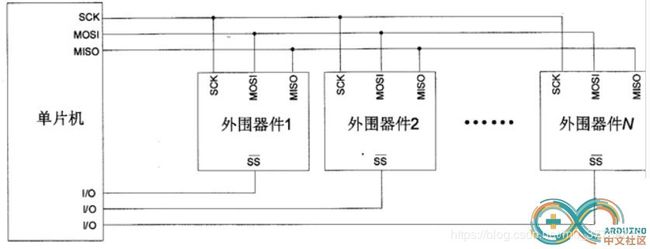
一主多从
主机选用独立的IO分别连接到从机的SS引脚,当需要与某个从机通信时,拉低相应的IO口即可。
主机和从机的信号传输方向见下表所示

SPI通信方式解读
不管是一主一从还是一主多从的SPI通信系统,
某一时刻通信双方只能是一个主机和一个从机,
内部主要由主从双方的两个移位寄存器(8 BIT SHIFT REGISTER)
和主机SPI时钟发生器(SPI CLOCK GENERATOR)组成。

通信过程简述如下:
1)条件准备。包括四线引脚的输入输出配置,主机SCK、MOSI必须配置为输出模式,MISO配置为输入模式,从机正好相关,说见上面的信号传输方向表。除之这外,还要开启SPI的工作使能,即置SPI控制寄存器的SPE位。
2)拉低从机的SS电平,从机做好数据传输准备,时刻注意主机发出的SCK信号。
3)数据传输。每来一个时钟脉冲信号,主从机间完成一位数据交换,8个时钟脉冲完成一个字节的数据交换。该字节传输完成,等待写入下一个传输字节。主从机间的交换逻辑见下图所示。主机和从机的移位寄存器连接成环,随着时钟脉冲,数据按照从高位到低位的方式依次移出主机寄存器和从机寄存器,并且依次移入从机寄存器和主机寄存器。当寄存器中的内容全部移出时,相当于完成了两个寄存器内容的交换。

4)传输结束。此时,硬件自动置位传输完成标识SPIF(位于SPI状态寄存器SPSR中),通过轮询状态寄存器SPIF位或中断的方式,读取传入的字节。最后置位SS(设为1),重置SPI内部逻辑为初始状态。
Arduino对SPI通信的实现
Arduino以SPIClass类的形式对SPI进行了封装,
并对用户开放了SPI对象用于操作SPI。
SPI的常用操作方法如下:
SPI.begin()-完成主机的初始化工作,包括:四线的输入输出配置、开启SPI的工作使能。从机的四线输入输出、工作使能需要手工配置,可以参见下面的例程。
SPI.transfer()-主机传送字节,并返回从从机接收的字节。注意:主机是通过轮询的方式等待发送完成(也即接收完成)。
SPI.attachInterrupt()-从机开启传输完成中断。注意:主机不要使用,因为固定为了轮询方式。
SPCR |=_BV(SPE)-从机开启SPI工作使能。这条语句为直接寄存器操作,并不是SPI类中的一部分。
Arduino的SPI通信实例
两块Arduino之间通过SPI通信,并用串口打印传输数据,方便用户查看。
使用两块Arduino UNO,一主一从。
Arduino UNO A: SPI 主机
Arduino UNO B: SPI 从机
连线方式:
A-------------------B
(10) SS---------->(10) SS
(11) MOSI------->(11) MOSI
(12) MISO<-------(12) MISO
(13) SCLK------->(13) SCLK
主机程序
#include
void setup (void)
{
// 开始串口通讯
//注意:此串口与SPI通信没有任何关系,只是为了程序演示输出SPI接收到的字节。
Serial.begin(115200);
digitalWrite(SS, HIGH); //SPI内部逻辑复位
SPI.begin (); // SPI通讯初始化配置
}
void loop (void)
{
char c;
// 使能从机
digitalWrite(SS, LOW); // SS - pin 10
// 循环发送字节,实现字符串的发送
for (const char * p = "Hello,world!\n" ; c = *p; p++) {
SPI.transfer (c);//主机SPI发送
Serial.print(c);//串口显示发送的字节
}
// 复位从机
digitalWrite(SS, HIGH);
delay (1000);
}
从机代码(轮询方式)
#include
char buf [100];
volatile byte pos;
volatile booleanprocess_it;
void setup (void)
{
Serial.begin (115200);
//从机的MISO要配置为输出模式
pinMode(MISO, OUTPUT);
//使能SPI,SPI可以正常工作了
SPCR |= _BV(SPE);
pos = 0;
}
charSPI_SlaveReceive(void){
while(!(SPSR & (1< 例程运行结果
