modbus_主从机测试_支持TCP/RTU
Modbus是一种串行通信协议,是Modicon于1979年为使用可编程逻辑控制器PLC而发表的.
MODBUS是工业领域通信协议的业界标准,并且现在是工业电子设备之间相当常用的连接方式.
Modbus比其他通信协议使用的更广泛的主要原因有:
1)公开发表并且无版税要求
2)相对容易的工业网络部署
3)对供应商来说,修改移动原生的位元或字节没有很多限制
Modbus允许多个设备连接在同一个网络上进行通信,举个例子,一个由测量温度和湿度的装置,并且将结果发送给计算机.
在数据采集与监视控制系统SCADA中,Modbus通常用来连接监控计算机和remote terminal unit (RTU).
细节可以参考wiki百科或相关资料,总的来讲modbus是一个非常靠谱的工业上大量使用的应用层通讯协议,能够让各个厂家的设备能够通讯,只要被支持就可以了。
一、协议版本
Modbus协议目前存在用于串口、以太网以及其他支持互联网协议的网络的版本.大多数Modbus设备通信通过串口EIA-485物理层进行.
对于串行连接,存在两个变种,它们在数值数据表示不同和协议细节上略有不同.Modbus RTU是一种紧凑的,采用二进制表示数据的方式.
Modbus ASCII是一种人类可读的,冗长的表示方式.这两个变种都使用串行通讯serial communication方式.
RTU格式后续的命令/数据带有循环冗余校验的校验和,而ASCII格式采用纵向冗余校验的校验和.
被配置为RTU变种的节点不会和设置为ASCII变种的节点通信,反之亦然。
对于通过TCP/IP的连接,存在多个Modbus/TCP变种,这种方式不需要校验和的计算.
对于所有的这三种通信协议在数据模型和功能调用上都是相同的,只有封装方式是不同的.
Modbus有一个扩展版本Modbus Plus(Modbus+或者MB+),不过此协定是Modicon专有的和Modbus不同.
它需要一个专门的协处理器来处理类似HDLC的高速令牌旋转,它使用1Mbit/s的双绞线,并且每个节点都有转换隔离装置,是一种采用转换/边缘触发而不是电压/水平触发的装置.
连接Modbus Plus到计算机需要特别的接口,通常是支持ISA,PCI或者PCMCIA总线的板卡.
二、通信和设备
Modbus协议是一个master/slave架构的协议,有一个节点是master节点,其他使用Modbus协议参与通信的节点是slave节点.
每一个slave设备都有一个唯一的地址,在串行和MB+网络中,只有被指定为主节点的节点可以启动一个命令.
在以太网上,任何一个设备都能发送一个Modbus命令,但是通常也只有一个主节点设备启动指令.
一个ModBus命令包含了打算执行的设备的Modbus地址,所有设备都会收到命令,但只有指定位置的设备会执行及回应指令.
地址0例外,指定地址0的指令是广播指令,所有收到指令的设备都会执行,不过不回应指令.
所有的Modbus命令包含了检查码,以确定到达的命令没有被破坏.
基本的ModBus命令能指令一个RTU改变它的寄存器的某个值,控制或者读取一个I/O端口,以及指挥设备回送一个或者多个其寄存器中的数据.
有许多modems和网关支持Modbus协议,因为Modbus协议很简单而且容易复制.它们当中一些为这个协议特别设计的.
有使用有线、无线通信甚至短消息和GPRS的不同实现,不过设计者需要克服一些包括高延迟和时序的问题.
相关说明,图片形式,下面会有用的,直观一点吧:
modbus栈结构

modbus帧,这个好好看看,下面调试会用到

典型的cs结构

公共功能码

三、libmodbus库安装
1、下载源码包libmodbus-3.0.6.tar.gz
http://libmodbus.org/download/
2、libmodbus移植
1)交叉编译--prefix参数
嵌入式开发板:
复制代码
2)如果在嵌入式开发板上运行类似unit-test-xxx测试程序时,首先要测试tcp的就要修改两个文件中的IP地址,默认是回环测试的
其次要测试rtu的就要修改两个文件中的串口设备文件名,嵌入式开发板上一般是ttySx,我们的板子是ttySACx
如下位置:
unit-test-server.c
复制代码
unit-test-client.c
复制代码
3)在tests目录下的类似unit-test-server这个不是可执行文件,而是一个脚本.
他会调用tests目录下的.lib/下的unit-test-server可执行文件,在PC中需要执行对应的脚本文件,而在嵌入式平台上直接执行tests/.lib可执行文件.
默认生成的测试可执行文件是在隐藏文件夹中的如下操作后可在samba映射中看到
复制代码
4)以上为基本的测试,如果想实际的使用这个库,可以自行写客户端或者服务器程序,调试可以使用对应的Modbus Poll/Slave这是windows下的可视化调试工具.
四、windows下的可视化调试软件
主要两个软件modbus poll和modbus slave,当然如果想先了解modbus通讯协议可以参考协议spec然后用vspd来连接这两个软件,先在pc上面做一些基础的实验,我想是个很好的入门方法。
注意以下软件仅仅用于学习评估,安装测试后删除。
安装软件如下:

VSPD

PC上测试软件
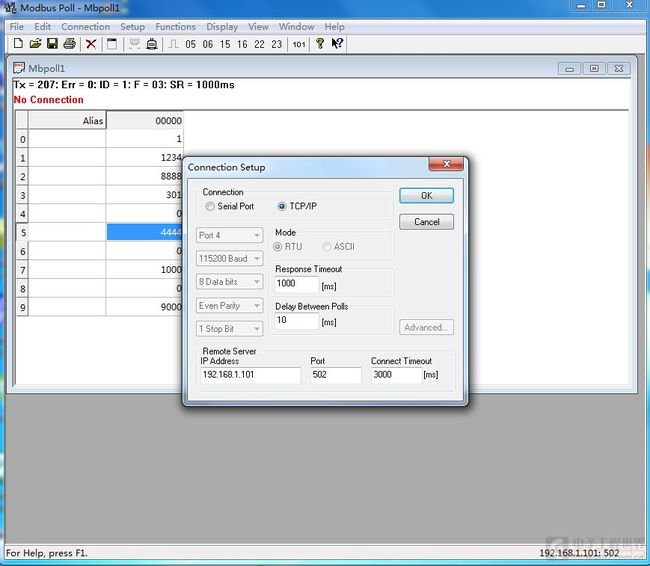
注意这里我们课使用localhost作为测试,选择tcp方式,方便一点不需要vspd的

串口的连接方式

五、libmodbus测试程序
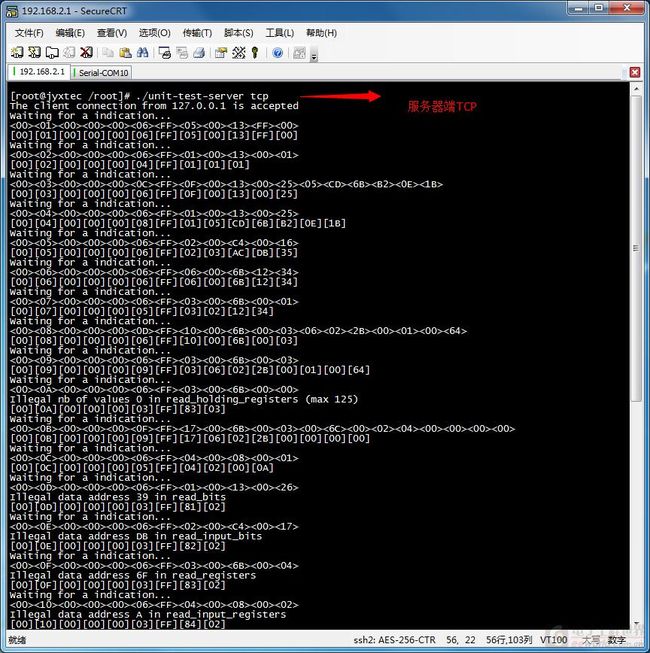
可以先在板子上面测试,如下
server程序
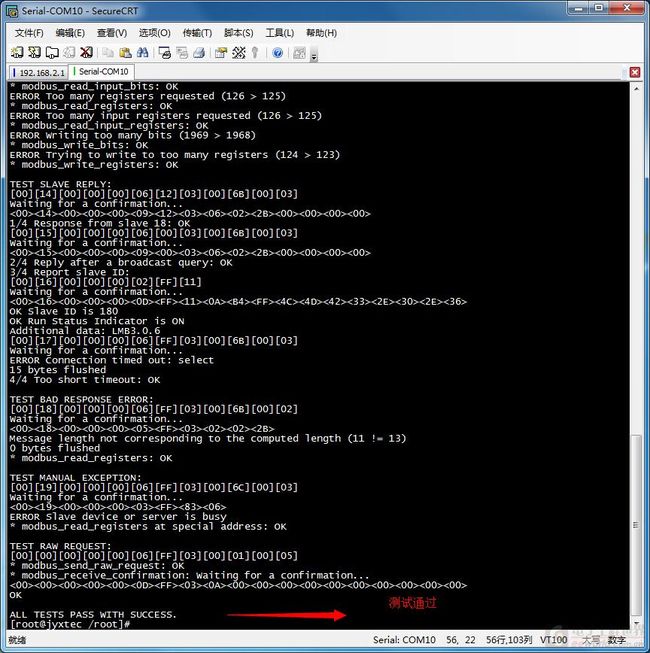
client测试

测试通过
六、使用可视化工具来调试modbus嵌入式程序
这里我偷懒了,直接使用自带的tests下面的程序来演示如何去做这个事情吧,大家可以动手写自己的modbus主机和从机程序了,方法很简单,不懂的看docs下面的文档还有就是tests下面的例子个个都很不错,我这个帖子不是深入的教学帖子,就不进行详细的代码级别的教学了,主要是说个思路大家自己发挥吧,想搞啥搞啥,没有局限,linux是自由的。当然了实际项目完全按照这个步骤来run没问题的。
我们来看一下unit -test-client.c这个文件中的我们来分析的部分,我也只做了这部分与可视化界面的通讯演示
复制代码
我们看几个函数说明
modbus_new_rtu

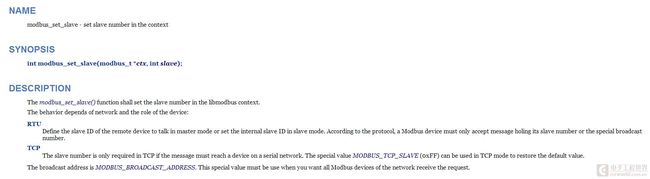
modbus_set_slave
modbus_write_bit

好了需要注意unit_test.h文件中关于server-id和address的定义信息,后面需要用到
复制代码
这有两个地址一个是设备地址一个是modbus的地址域,还比较好懂吧,一主多从,典型的rs485通信链路。
测试图,细节可以看图片中的文字说明:
1)设置slave,这里可以理解为是一个服务,是个从机
2)配置通信,注意我使用板子的COM2
3)测试中,打开通信调试,原始数据,可比对前面的帧结构一个个对应上,还有就是后面那副图中的调试数据
4)板子中跑的程序可以理解为主机,他对设备地址为17=0x11的从机进行bits读写操作
好了,写个帖子有点累,要说的东西很多,大家有问题跟帖说明吧,我会做出解答。
MODBUS是工业领域通信协议的业界标准,并且现在是工业电子设备之间相当常用的连接方式.
Modbus比其他通信协议使用的更广泛的主要原因有:
1)公开发表并且无版税要求
2)相对容易的工业网络部署
3)对供应商来说,修改移动原生的位元或字节没有很多限制
Modbus允许多个设备连接在同一个网络上进行通信,举个例子,一个由测量温度和湿度的装置,并且将结果发送给计算机.
在数据采集与监视控制系统SCADA中,Modbus通常用来连接监控计算机和remote terminal unit (RTU).
细节可以参考wiki百科或相关资料,总的来讲modbus是一个非常靠谱的工业上大量使用的应用层通讯协议,能够让各个厂家的设备能够通讯,只要被支持就可以了。
一、协议版本
Modbus协议目前存在用于串口、以太网以及其他支持互联网协议的网络的版本.大多数Modbus设备通信通过串口EIA-485物理层进行.
对于串行连接,存在两个变种,它们在数值数据表示不同和协议细节上略有不同.Modbus RTU是一种紧凑的,采用二进制表示数据的方式.
Modbus ASCII是一种人类可读的,冗长的表示方式.这两个变种都使用串行通讯serial communication方式.
RTU格式后续的命令/数据带有循环冗余校验的校验和,而ASCII格式采用纵向冗余校验的校验和.
被配置为RTU变种的节点不会和设置为ASCII变种的节点通信,反之亦然。
对于通过TCP/IP的连接,存在多个Modbus/TCP变种,这种方式不需要校验和的计算.
对于所有的这三种通信协议在数据模型和功能调用上都是相同的,只有封装方式是不同的.
Modbus有一个扩展版本Modbus Plus(Modbus+或者MB+),不过此协定是Modicon专有的和Modbus不同.
它需要一个专门的协处理器来处理类似HDLC的高速令牌旋转,它使用1Mbit/s的双绞线,并且每个节点都有转换隔离装置,是一种采用转换/边缘触发而不是电压/水平触发的装置.
连接Modbus Plus到计算机需要特别的接口,通常是支持ISA,PCI或者PCMCIA总线的板卡.
二、通信和设备
Modbus协议是一个master/slave架构的协议,有一个节点是master节点,其他使用Modbus协议参与通信的节点是slave节点.
每一个slave设备都有一个唯一的地址,在串行和MB+网络中,只有被指定为主节点的节点可以启动一个命令.
在以太网上,任何一个设备都能发送一个Modbus命令,但是通常也只有一个主节点设备启动指令.
一个ModBus命令包含了打算执行的设备的Modbus地址,所有设备都会收到命令,但只有指定位置的设备会执行及回应指令.
地址0例外,指定地址0的指令是广播指令,所有收到指令的设备都会执行,不过不回应指令.
所有的Modbus命令包含了检查码,以确定到达的命令没有被破坏.
基本的ModBus命令能指令一个RTU改变它的寄存器的某个值,控制或者读取一个I/O端口,以及指挥设备回送一个或者多个其寄存器中的数据.
有许多modems和网关支持Modbus协议,因为Modbus协议很简单而且容易复制.它们当中一些为这个协议特别设计的.
有使用有线、无线通信甚至短消息和GPRS的不同实现,不过设计者需要克服一些包括高延迟和时序的问题.
相关说明,图片形式,下面会有用的,直观一点吧:
modbus栈结构
modbus帧,这个好好看看,下面调试会用到
典型的cs结构
公共功能码
三、libmodbus库安装
1、下载源码包libmodbus-3.0.6.tar.gz
http://libmodbus.org/download/
2、libmodbus移植
1)交叉编译--prefix参数
嵌入式开发板:
- # ./configure --build=i686 --host=arm-linux --enable-static --prefix=$(pwd)/libmodbus-install
- # make
- # make install
2)如果在嵌入式开发板上运行类似unit-test-xxx测试程序时,首先要测试tcp的就要修改两个文件中的IP地址,默认是回环测试的
其次要测试rtu的就要修改两个文件中的串口设备文件名,嵌入式开发板上一般是ttySx,我们的板子是ttySACx
如下位置:
unit-test-server.c
- if (use_backend == TCP) {
- ctx = modbus_new_tcp("192.168.1.200", 1502);
- query = malloc(MODBUS_TCP_MAX_ADU_LENGTH);
- } else if (use_backend == TCP_PI) {
- ctx = modbus_new_tcp_pi("::0", "1502");
- query = malloc(MODBUS_TCP_MAX_ADU_LENGTH);
- } else {
- ctx = modbus_new_rtu("/dev/ttySAC1", 115200, 'N', 8, 1);
- modbus_set_slave(ctx, SERVER_ID);
- query = malloc(MODBUS_RTU_MAX_ADU_LENGTH);
- }
unit-test-client.c
- if (use_backend == TCP) {
- ctx = modbus_new_tcp("192.168.1.200", 1502);
- } else if (use_backend == TCP_PI) {
- ctx = modbus_new_tcp_pi("::1", "1502");
- } else {
- ctx = modbus_new_rtu("/dev/ttySAC1", 115200, 'N', 8, 1);
- }
3)在tests目录下的类似unit-test-server这个不是可执行文件,而是一个脚本.
他会调用tests目录下的.lib/下的unit-test-server可执行文件,在PC中需要执行对应的脚本文件,而在嵌入式平台上直接执行tests/.lib可执行文件.
默认生成的测试可执行文件是在隐藏文件夹中的如下操作后可在samba映射中看到
- # cd ./tests/
- # cp .lib/ test-bin/
- # cd test-bin/
4)以上为基本的测试,如果想实际的使用这个库,可以自行写客户端或者服务器程序,调试可以使用对应的Modbus Poll/Slave这是windows下的可视化调试工具.
四、windows下的可视化调试软件
主要两个软件modbus poll和modbus slave,当然如果想先了解modbus通讯协议可以参考协议spec然后用vspd来连接这两个软件,先在pc上面做一些基础的实验,我想是个很好的入门方法。
注意以下软件仅仅用于学习评估,安装测试后删除。
安装软件如下:
VSPD
PC上测试软件
注意这里我们课使用localhost作为测试,选择tcp方式,方便一点不需要vspd的
串口的连接方式
五、libmodbus测试程序
可以先在板子上面测试,如下
server程序
client测试
测试通过
六、使用可视化工具来调试modbus嵌入式程序
这里我偷懒了,直接使用自带的tests下面的程序来演示如何去做这个事情吧,大家可以动手写自己的modbus主机和从机程序了,方法很简单,不懂的看docs下面的文档还有就是tests下面的例子个个都很不错,我这个帖子不是深入的教学帖子,就不进行详细的代码级别的教学了,主要是说个思路大家自己发挥吧,想搞啥搞啥,没有局限,linux是自由的。当然了实际项目完全按照这个步骤来run没问题的。
我们来看一下unit -test-client.c这个文件中的我们来分析的部分,我也只做了这部分与可视化界面的通讯演示
- /** COIL BITS **/
- /* Single */
- rc = modbus_write_bit(ctx, UT_BITS_ADDRESS, ON);
- printf("1/2 modbus_write_bit: ");
- if (rc == 1) {
- printf("OK\n");
- } else {
- printf("FAILED\n");
- goto close;
- }
- rc = modbus_read_bits(ctx, UT_BITS_ADDRESS, 1, tab_rp_bits);
- printf("2/2 modbus_read_bits: ");
- if (rc != 1) {
- printf("FAILED (nb points %d)\n", rc);
- goto close;
- }
- if (tab_rp_bits[0] != ON) {
- printf("FAILED (%0X = != %0X)\n", tab_rp_bits[0], ON);
- goto close;
- }
- printf("OK\n");
- /* End single */
我们看几个函数说明
modbus_new_rtu
modbus_set_slave
modbus_write_bit
好了需要注意unit_test.h文件中关于server-id和address的定义信息,后面需要用到
- #define SERVER_ID 17
- #define INVALID_SERVER_ID 18
- const uint16_t UT_BITS_ADDRESS = 0x13;
- const uint16_t UT_BITS_NB = 0x25;
- const uint8_t UT_BITS_TAB[] = { 0xCD, 0x6B, 0xB2, 0x0E, 0x1B };
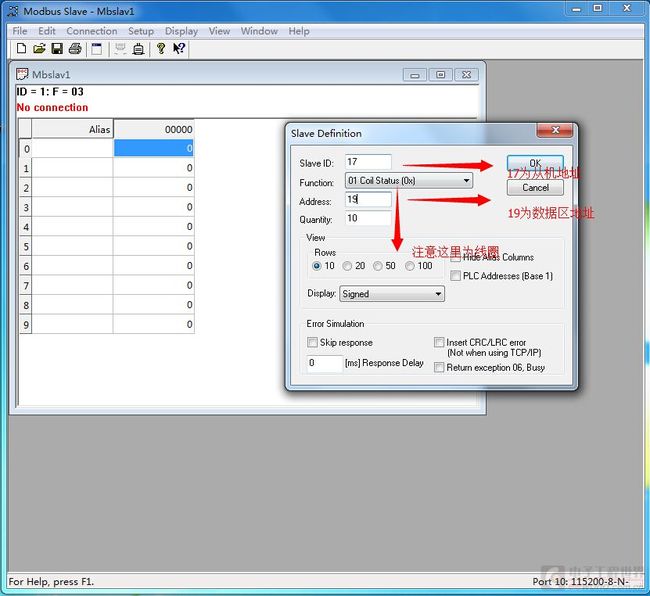
测试图,细节可以看图片中的文字说明:
1)设置slave,这里可以理解为是一个服务,是个从机
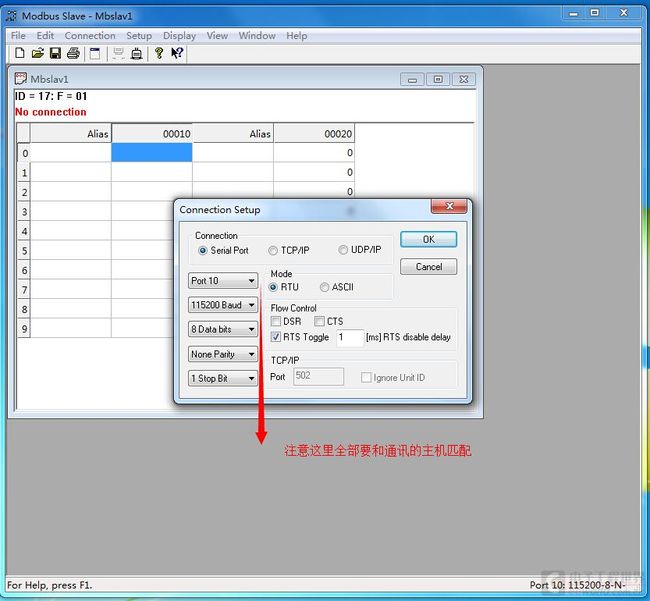
2)配置通信,注意我使用板子的COM2
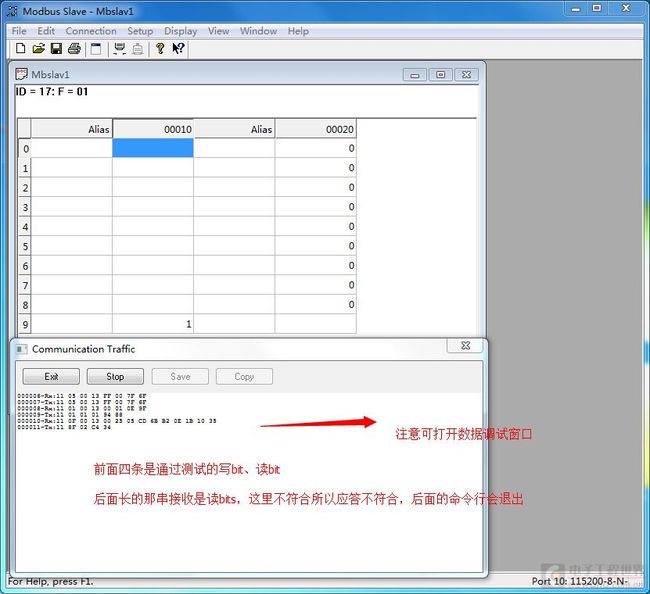
3)测试中,打开通信调试,原始数据,可比对前面的帧结构一个个对应上,还有就是后面那副图中的调试数据
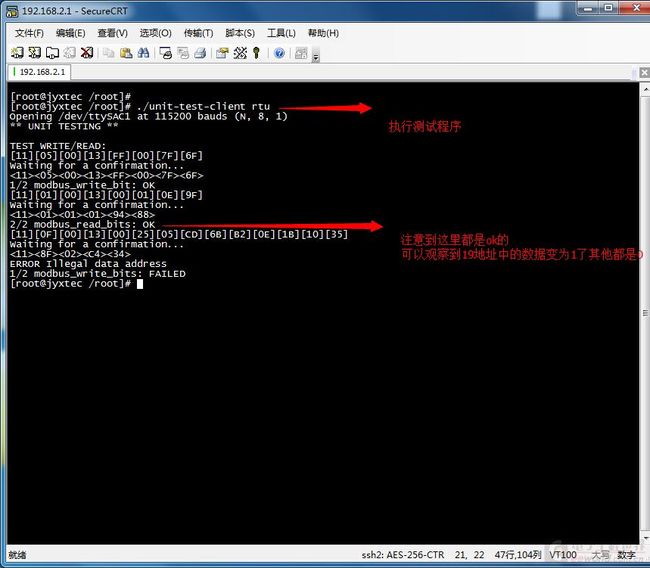
4)板子中跑的程序可以理解为主机,他对设备地址为17=0x11的从机进行bits读写操作
好了,写个帖子有点累,要说的东西很多,大家有问题跟帖说明吧,我会做出解答。