车位状态检测
一、分割图像得到样本(这一步至关重要)
学习:https://deeplearninganalytics.org/blog/page/4
给定若干副图像,如何得到样本点?----传统图像的经验
如下一副图像


1)颜色提取,得到白色黄色的RGB图像
效果如下:
2)灰度化(技巧利用map函数,map(func,iter))
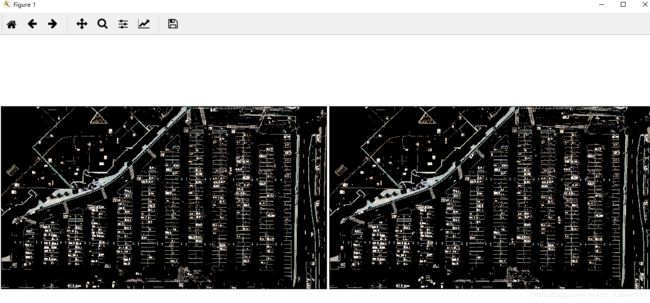
3)利用canny边缘检测
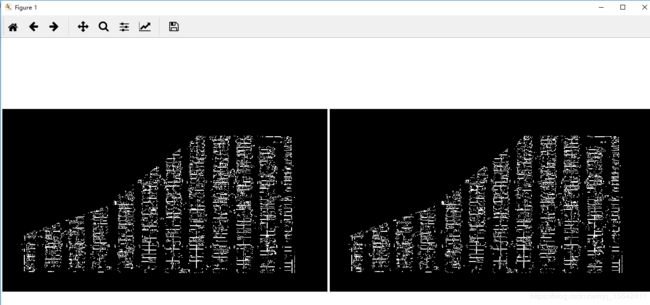
4)提取感兴趣区域
效果图如下:
5)霍夫直线检测(给予边缘检测后的图像)
6)得到每个车位的块(一列)
(1)对霍夫直线过滤
(2)对起点坐标(根据起点x1)排序
(3)聚类找到距离起点(x1)最近的点
(4)得到每个parking rect的坐标,建立缓冲得到每个车位块
效果图如下
7)得到每个车位
如下图:
8)裁剪图得到训练样本
二、利用CNN训练模型(keras就可以)
第一部分代码如下
#coding= utf-8
from __future__ import division
import matplotlib.pyplot as plt
import cv2
import os, glob
import numpy as np
cwd = os.getcwd()
def show_images(images, cmap=None):
cols = 2
rows = (len(images)+1)//cols
plt.figure(figsize=(15, 12))
for i, image in enumerate(images):
plt.subplot(rows, cols, i+1)
# 只有一个通道的时候用gray
cmap = 'gray' if len(image.shape)==2 else cmap
plt.imshow(image, cmap=cmap)
plt.xticks([])
plt.yticks([])
plt.tight_layout(pad=0, h_pad=0, w_pad=0)
plt.show()
test_images = [cv2.imread(os.path.abspath(cwd+"\\"+path)) for path in glob.glob('test_images/*.jpg')]
# show_images(test_images)
def select_rgb_white_yellow(image):
# 白色提取,mask
lower = np.uint8([120, 120, 120])
upper = np.uint8([255, 255, 255])
white_mask = cv2.inRange(image, lower, upper)
# 黄色提取mask
lower = np.uint8([190, 190, 0])
upper = np.uint8([255, 255, 255])
yellow_mask = cv2.inRange(image, lower, upper)
# 联合mask
mask = cv2.bitwise_or(white_mask, yellow_mask)
masked = cv2.bitwise_and(image, image, mask = mask)
return masked
white_yellow_images = list(map(select_rgb_white_yellow, test_images))
show_images(white_yellow_images)
#图像转换
def convert_gray_scale(image):
return cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
gray_images = list(map(convert_gray_scale, white_yellow_images))
show_images(gray_images)
#使用canny 检测边缘
def detect_edges(image, low_threshold=50, high_threshold=200):
return cv2.Canny(image, low_threshold, high_threshold)
edge_images = list(map(lambda image: detect_edges(image), gray_images))
show_images(edge_images)
#识别感兴趣区域
def filter_region(image, vertices):
"""
利用输入图像的顶点创建一个mask
"""
mask = np.zeros_like(image)
if len(mask.shape)==2:
cv2.fillPoly(mask, vertices, 255)#单通道,255是颜色
else:
cv2.fillPoly(mask, vertices, (255,)*mask.shape[2]) # 以免图像是多通道。
return cv2.bitwise_and(image, mask)
def select_region(image):
"""
"""
# 定义顶点
rows, cols = image.shape[:2]
pt_1 = [cols*0.05, rows*0.90]
pt_2 = [cols*0.05, rows*0.70]
pt_3 = [cols*0.30, rows*0.55]
pt_4 = [cols*0.6, rows*0.15]
pt_5 = [cols*0.90, rows*0.15]
pt_6 = [cols*0.90, rows*0.90]
# 顶点坐标虚整形,因为像素。
vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]], dtype=np.int32)
return filter_region(image, vertices)
roi_images = list(map(select_region, edge_images))
show_images(roi_images)
'''
'''
def hough_lines(image):
"""
图像应该是边缘检测后的
"""
return cv2.HoughLinesP(image, rho=0.1, theta=np.pi/10, threshold=15, minLineLength=9, maxLineGap=4)
list_of_lines = list(map(hough_lines, roi_images))
#画线
def draw_lines(image, lines, color=[255, 0, 0], thickness=2, make_copy=True):
# cv2.HoughLinesP 变换检测出来的线形状如下: (-1, 1, 4)
if make_copy:
image = np.copy(image) # don't want to modify the original
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:#delta y<1说明是水平线,线的长度大于25,小于55
cleaned.append((x1,y1,x2,y2))
cv2.line(image, (x1, y1), (x2, y2), color, thickness)
print(" 检测到的线的数目: ", len(cleaned))
return image
line_images = []
for image, lines in zip(test_images, list_of_lines):#这里用的是原图,testimages,list_of_line是利用roiimage检测出来的
line_images.append(draw_lines(image, lines))
show_images(line_images)
############
############
def identify_blocks(image, lines, make_copy=True):
if make_copy:
new_image = np.copy(image)
#Step 1: 收集纯线,即是满足要求的线
cleaned = []
for line in lines:
for x1,y1,x2,y2 in line:
#水平线,长度鉴于25,55之间
if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55:
cleaned.append((x1,y1,x2,y2))
#Step 2: 对起点坐标排序,x1
'''
operator.itemgetter是获取哪一维数据
'''
import operator
list1 = sorted(cleaned, key=operator.itemgetter(0, 1))
#Step 3: 找到距离x1最近的点
clusters = {}
dIndex = 0
clus_dist = 10
for i in range(len(list1) - 1):
distance = abs(list1[i+1][0] - list1[i][0])
# print(distance)
if distance <= clus_dist:
if not dIndex in clusters.keys(): clusters[dIndex] = []
clusters[dIndex].append(list1[i])
clusters[dIndex].append(list1[i + 1])
else:
dIndex += 1
#Step 4:
rects = {}
i = 0
for key in clusters:
all_list = clusters[key]
cleaned = list(set(all_list))
if len(cleaned) > 5:
cleaned = sorted(cleaned, key=lambda tup: tup[1])
avg_y1 = cleaned[0][1]
avg_y2 = cleaned[-1][1]
# print(avg_y1, avg_y2)
avg_x1 = 0
avg_x2 = 0
for tup in cleaned:
avg_x1 += tup[0]
avg_x2 += tup[2]
avg_x1 = avg_x1/len(cleaned)
avg_x2 = avg_x2/len(cleaned)
rects[i] = (avg_x1, avg_y1, avg_x2, avg_y2)
i += 1
# print(clusters)
print("parking 数目: ", len(rects))
#Step 5: 画图
buff = 7#建立缓冲区
for key in rects:
tup_topLeft = (int(rects[key][0] - buff), int(rects[key][1]))
tup_botRight = (int(rects[key][2] + buff), int(rects[key][3]))
# cv2.rectangle(new_image,(int(rects[key][0]),int(rects[key][1])),(int(rects[key][2]),int(rects[key][3])),(0,0,255),3)
cv2.rectangle(new_image, tup_topLeft,tup_botRight,(0,255,0),3)
return new_image, rects
####
rect_images = []
rect_coords = []
for image, lines in zip(test_images, list_of_lines):
new_image, rects = identify_blocks(image, lines)
rect_images.append(new_image)
rect_coords.append(rects)
show_images(rect_images)
#########
'''
识别每个停车场区域的每个车位
'''
#########
def draw_parking(image, rects, make_copy = True, color=[255, 0, 0], thickness=2, save = True):
if make_copy:
new_image = np.copy(image)
gap = 15.5
spot_dict = {} # 储存每个车位的id
tot_spots = 0
adj_y1 = {0: 20, 1:-10, 2:0, 3:-11, 4:28, 5:5, 6:-15, 7:-15, 8:-10, 9:-30, 10:9, 11:-32}
adj_y2 = {0: 30, 1: 50, 2:15, 3:10, 4:-15, 5:15, 6:15, 7:-20, 8:15, 9:15, 10:0, 11:30}
adj_x1 = {0: -8, 1:-15, 2:-15, 3:-15, 4:-15, 5:-15, 6:-15, 7:-15, 8:-10, 9:-10, 10:-10, 11:0}
adj_x2 = {0: 0, 1: 15, 2:15, 3:15, 4:15, 5:15, 6:15, 7:15, 8:10, 9:10, 10:10, 11:0}
for key in rects:
# 水平线
if key<12:
tup = rects[key]
x1 = int(tup[0]+ adj_x1[key])
x2 = int(tup[2]+ adj_x2[key])
y1 = int(tup[1] + adj_y1[key])
y2 = int(tup[3] + adj_y2[key])
cv2.rectangle(new_image, (x1, y1),(x2,y2),(0,255,0),2)
num_splits = int(abs(y2-y1)//gap)
for i in range(0, num_splits+1):
y = int(y1 + i*gap)
cv2.line(new_image, (x1, y), (x2, y), color, thickness)
if key > 0 and key < len(rects) -1 :
#画上竖直线
x = int((x1 + x2)/2)
cv2.line(new_image, (x, y1), (x, y2), color, thickness)
#
if key == 0 or key == (len(rects) -1):
tot_spots += num_splits +1
else:
tot_spots += 2*(num_splits +1)
#
if key == 0 or key == (len(rects) -1):
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
spot_dict[(x1, y, x2, y+gap)] = cur_len +1
else:
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i*gap)
x = int((x1 + x2)/2)
spot_dict[(x1, y, x, y+gap)] = cur_len +1
spot_dict[(x, y, x2, y+gap)] = cur_len +2
print("总的停车位: ", tot_spots, cur_len)
if save:
filename = 'with_parking.jpg'
cv2.imwrite(filename, new_image)
return new_image, spot_dict
#
delineated = []
spot_pos = []
for image, rects in zip(test_images, rect_coords):
new_image, spot_dict = draw_parking(image, rects)
delineated.append(new_image)
spot_pos.append(spot_dict)
# print(spot_pos)
show_images(delineated)
#
final_spot_dict = spot_pos[1]
def assign_spots_map(image, spot_dict=final_spot_dict, make_copy = True, color=[255, 0, 0], thickness=2):
if make_copy:
new_image = np.copy(image)
for spot in spot_dict.keys():
(x1, y1, x2, y2) = spot
cv2.rectangle(new_image, (int(x1),int(y1)), (int(x2),int(y2)), color, thickness)
return new_image
marked_spot_images = list(map(assign_spots_map, test_images))
show_images(marked_spot_images)
#
import pickle
with open('spot_dict.pickle', 'wb') as handle:
pickle.dump(final_spot_dict, handle, protocol=pickle.HIGHEST_PROTOCOL)
## 得到训练样本
def save_images_for_cnn(image, spot_dict = final_spot_dict, folder_name ='for_cnn'):
for spot in spot_dict.keys():
(x1, y1, x2, y2) = spot
(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))
#crop this image
# print(image.shape)
spot_img = image[y1:y2, x1:x2]
spot_img = cv2.resize(spot_img, (0,0), fx=2.0, fy=2.0)
spot_id = spot_dict[spot]
filename = 'spot' + str(spot_id) +'.jpg'
print(spot_img.shape, filename, (x1,x2,y1,y2))
# print(os.path.join(cwd+"\\"+folder_name, filename))
cv2.imwrite(os.path.join(cwd+"\\"+folder_name, filename), spot_img)
save_images_for_cnn(test_images[0])