STM32F103单片机生成16路PWM波
单片机输出pwm波在项目中是恨常用的一个功能,今天就总结一下用STM32F103C8T6单片机输出16路 pwm波。
使用keil5软件,用标准库函数来实现。
首先看定时器初始化
void TIM1_PWM_Init(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitSturcture;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE);
//初始化IO口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//设置 TIM ARR PSC
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
//TIM1_CH1 PWM1 模式
TIM_OCInitSturcture.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitSturcture.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitSturcture.TIM_OCPolarity = TIM_OCPolarity_High; //输出高电平有效
TIM_OC1Init(TIM1, &TIM_OCInitSturcture);
//TIM1_CH2 PWM1 模式
TIM_OCInitSturcture.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitSturcture.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitSturcture.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM1, &TIM_OCInitSturcture);
//TIM1_CH3 PWM2 模式
TIM_OCInitSturcture.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitSturcture.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitSturcture.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM1, &TIM_OCInitSturcture);
//TIM1_CH4 PWM2 模式
TIM_OCInitSturcture.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitSturcture.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitSturcture.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC4Init(TIM1, &TIM_OCInitSturcture);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //TIM1_CH1 使能预装载寄存器
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); //TIM1_CH2 使能预装载寄存器
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); //TIM1_CH3 使能预装载寄存器
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //TIM1_CH4 使能预装载寄存器
TIM_Cmd(TIM1, ENABLE); //使能计数器
TIM_CtrlPWMOutputs(TIM1, ENABLE); //主输出使能
}
初始化定时1的4个通道,对应IO口为 PA8,PA9,PA10,PA11,将这4个口都设置为PWM输出口。入口参数arr用来设置定时器的自动重装载值,psc用于设置时钟分频系数。时钟默认为72MHZ。
下来初始化定时器2
void TIM2_PWM_Init(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//初始化TIM2
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
//初始化TIM2_CH1 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
//初始化TIM2_CH2 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
//初始化TIM2_CH3 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
//初始化TIM2_CH4 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
//使能TIM2在CCR上的预装载寄存器
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
//使能TIM2
TIM_Cmd(TIM2, ENABLE);
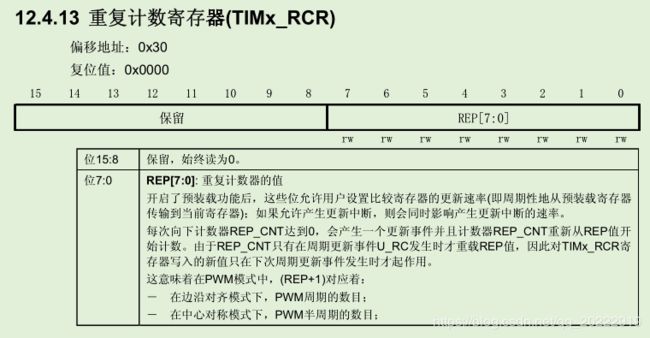
}这里要注意的是,定时器1是高级定时器,定时器2、3、4是通用定时器。只有高级定时器有重复计数寄存器,而通过定时器没有重复计数寄存器。定时器2初始化时,比定时器1少一行代码,这里要注意一下。
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00;重复计数寄存器主要作用如下:
其余设置方法和定时器1基本一样,定时器2的4个通道对应的IO口为PA0,PA1,PA2,PA3.将这四个口设置为PWM输出模式。
入口参数arr用来设置定时器的自动重装载值,psc用于设置时钟分频系数。时钟默认为72MHZ。
下来设置定时器3
void TIM3_PWM_Init(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE); //使能GPIO时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//初始化TIM3
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//初始化TIM3_CH1 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
//初始化TIM3_CH2 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
//初始化TIM3_CH3 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
//初始化TIM3_CH4 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
//使能TIM3在CCR上的预装载寄存器
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
//使能TIM3
TIM_Cmd(TIM3, ENABLE);
}设置方法和定时器2一样,定时器3的4个通道对应的IO口为PA6,PA7,PB0,PB1。将这四个口设置为PWM输出模式。
入口参数arr用来设置定时器的自动重装载值,psc用于设置时钟分频系数。时钟默认为72MHZ。
最后设置定时器4
void TIM4_PWM_Init(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); //使能GPIO时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//初始化TIM4
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStructure);
//初始化TIM4_CH1 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM4, &TIM_OCInitStructure);
//初始化TIM4_CH2 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM4, &TIM_OCInitStructure);
//初始化TIM4_CH3 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM4, &TIM_OCInitStructure);
//初始化TIM4_CH4 PWM 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC4Init(TIM4, &TIM_OCInitStructure);
//使能TIM4在CCR上的预装载寄存器
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable);
//使能TIM4
TIM_Cmd(TIM4, ENABLE);
}设置方法和定时器2一样,定时器4的4个通道对应的IO口为PB6,PB7,PB8,PB9。将这四个口设置为PWM输出模式。
入口参数arr用来设置定时器的自动重装载值,psc用于设置时钟分频系数。时钟默认为72MHZ。
这样总共16路的PWM初始化就完成了,下来看主函数设置
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "pwm.h"
int main(void)
{
u16 led_pwm_val = 0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//不分频。PWM频率=72000000/9000=8Khz
TIM1_PWM_Init(8999, 0);
TIM2_PWM_Init(8999, 0);
TIM3_PWM_Init(8999, 0);
TIM4_PWM_Init(8999, 0);
led_pwm_val = 899;
while(1)
{
if(led_pwm_val < 8999)
led_pwm_val++;
else
led_pwm_val = 0;
TIM_SetCompare1(TIM1, led_pwm_val); //TIM1_CH1 PA8
TIM_SetCompare2(TIM1, led_pwm_val); //TIM1_CH2 PA9
TIM_SetCompare3(TIM1, led_pwm_val); //TIM1_CH3 PA10
TIM_SetCompare4(TIM1, led_pwm_val); //TIM1_CH4 PA11
TIM_SetCompare1(TIM2, led_pwm_val); //TIM2_CH1 PA0
TIM_SetCompare2(TIM2, led_pwm_val); //TIM2_CH2 PA1
TIM_SetCompare3(TIM2, led_pwm_val); //TIM2_CH3 PA2
TIM_SetCompare4(TIM2, led_pwm_val); //TIM2_CH4 PA3
TIM_SetCompare1(TIM3, led_pwm_val); //TIM3_CH1 PA6
TIM_SetCompare2(TIM3, led_pwm_val); //TIM3_CH2 PA7
TIM_SetCompare3(TIM3, led_pwm_val); //TIM3_CH3 PB0
TIM_SetCompare4(TIM3, led_pwm_val); //TIM3_CH4 PB1
TIM_SetCompare1(TIM4, led_pwm_val); //TIM4_CH1 PB6
TIM_SetCompare2(TIM4, led_pwm_val); //TIM4_CH2 PB7
TIM_SetCompare3(TIM4, led_pwm_val); //TIM4_CH3 PB8
TIM_SetCompare4(TIM4, led_pwm_val); //TIM4_CH4 PB9
delay_ms(1);
}
}
初始化时设置4个定时器的频率为8K,在while循环中调节占空比从0---100%变化。程序编译后烧写到单片机中,通过示波器就能观察到PWM波形变化了。
这里先用软件仿真看一下效果