ubuntu16.04下使用Modbus RTU协议控制Robotiq
ubuntu16.04下使用Modbus RTU协议控制Robotiq
- 一、设备配置
- 二、创建工作空间
- 三、安装驱动
- 四、配置串口
- 五、 ROS节点控制夹爪
- 六、RVIZ显示模型
一、设备配置
操作系统:Ubuntu 16.04
夹爪型号:Robotiq 2f-140
转换线:RS485转USB
通过RS485转USB建立两指夹爪和上位机通讯,此时Robotiq指示灯显示红色。
二、创建工作空间
在创建工作空间是注意在不同的文件夹下执行终端命令
1.创建robotiq_ws工作空间:
mkdir -p robotiq_ws/src
-----执行命令后,home下会新创建robotiq_ws文件夹,robotiq_ws文件夹下出现src文件夹。
2.这时返回robotiq_ws文件夹下,在robotiq_ws文件夹下编译工作空间:
cd ~/robotiq_ws/
catkin_make
-----此时会出现三个文件夹

3.配置环境变量:
gedit ~/.bashrc
在文末添加
source ~/robotiq_ws/devel/setup.bash

4.下载robotiq功能包
cd ~/robotiq_ws/src/
git clone https://github.com/ros-industrial/robotiq.git
5.编译功能包
cd ~/robotiq_ws
catkin_make
三、安装驱动
cd ~/.robotiq_ws
rosdep install robotiq_modbus_rtu
四、配置串口
1.提供权限
sudo usermod -a -G dialout YOURUSERNAME
2.找出连接的端口
dmesg | grep tty
大部分为ttyUSB0,可以根据显示的串口修改接下来的命令。
五、 ROS节点控制夹爪
1.运行双指夹持器驱动程序节点
roscore
rosrun robotiq_2f_gripper_control Robotiq2FGripperRtuNode.py / dev / ttyUSB0
-----此时夹爪指示灯由红色变为蓝色。
2.运行2-Finger Gripper简单控制器节点
rosrun robotiq_2f_gripper_control Robotiq2FGripperSimpleController.py
-----输入a初始化夹爪,然后输入0-250之间的一个数字,夹爪根据命令执行动作;还可以输入o或c执行张开闭合动作。

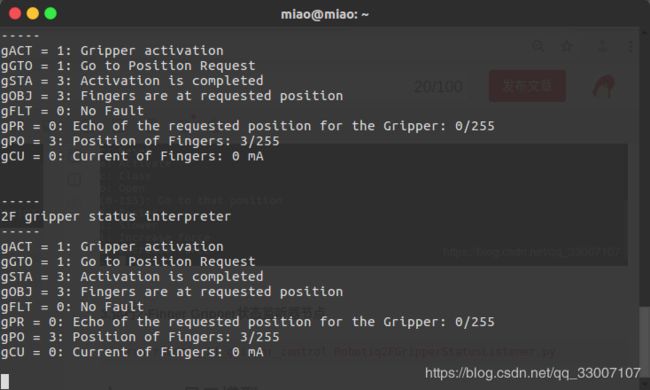
3.运行2-Finger Gripper状态监听器节点
rosrun robotiq_2f_gripper_control Robotiq2FGripperStatusListener.py
可以实现当前夹爪位置、电流等状态。
六、RVIZ显示模型
roslaunch robotiq_2f_140_gripper_visualization test_2f_140_model.launch
在joint_state_publisher窗口下可以调节夹爪模型的张开、闭合动作。
