【时空序列预测第十篇】Cubic LSTMs for Video Prediction
一、Address
AAAI2019的一篇文章
Cubic LSTMs for Video Prediction
论文链接地址: https://arxiv.org/pdf/1904.09412.pdf
二、Introduction and Model
2.1 LSTM以及ConvLSTM
这里简单列举下,其实我已经写过很多次了,只是为了方便大家阅读
LSTM结构具体参考文章:
公式为:
F C − L S T M { i t = σ ( W i ⋅ [ X t , H t − 1 ] + b i ) f t = σ ( W f ⋅ [ X t , H t − 1 ] + b f ) o t = σ ( W o ⋅ [ X t , H t − 1 ] + b o ) c t = tanh ( W c ⋅ [ X t , H t − 1 ] + b c ) C t = f t ⊙ C t + i t ⊙ c t H t = o t ⊙ tanh ( C t ) \mathrm{FC}-\mathrm{LSTM}\left\{\begin{array}{l} i_{t}=\sigma\left(\mathcal{W}_{i} \cdot\left[\mathcal{X}_{t}, \mathcal{H}_{t-1}\right]+b_{i}\right) \\ f_{t}=\sigma\left(\mathcal{W}_{f} \cdot\left[\mathcal{X}_{t}, \mathcal{H}_{t-1}\right]+b_{f}\right) \\ o_{t}=\sigma\left(\mathcal{W}_{o} \cdot\left[\mathcal{X}_{t}, \mathcal{H}_{t-1}\right]+b_{o}\right) \\ c_{t}=\tanh \left(\mathcal{W}_{c} \cdot\left[\mathcal{X}_{t}, \mathcal{H}_{t-1}\right]+b_{c}\right) \\ \mathcal{C}_{t}=f_{t} \odot \mathcal{C}_{t}+i_{t} \odot c_{t} \\ \mathcal{H}_{t}=o_{t} \odot \tanh \left(\mathcal{C}_{t}\right) \end{array}\right. FC−LSTM⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧it=σ(Wi⋅[Xt,Ht−1]+bi)ft=σ(Wf⋅[Xt,Ht−1]+bf)ot=σ(Wo⋅[Xt,Ht−1]+bo)ct=tanh(Wc⋅[Xt,Ht−1]+bc)Ct=ft⊙Ct+it⊙ctHt=ot⊙tanh(Ct)
缩写可以表示为:
F C − L S T M : ( C t , H t ) = L S T M ( X t , ( C t − 1 , H t − 1 ) ; W , b ; ⋅ ) \begin{array}{l} \mathrm{FC}-\mathrm{LSTM}: \\ \quad\left(\mathcal{C}_{t}, \mathcal{H}_{t}\right)=\mathrm{LSTM}\left(\mathcal{X}_{t},\left(\mathcal{C}_{t-1}, \mathcal{H}_{t-1}\right) ; \mathcal{W}, b ; \cdot\right) \end{array} FC−LSTM:(Ct,Ht)=LSTM(Xt,(Ct−1,Ht−1);W,b;⋅)
ConvLSTM论文解读具体参考文章:
缩写可以表示为:
( C t , H t ) = LSTM ( X t , ( C t − 1 , H t − 1 ) ; W , b ; ∗ ) \left(\mathcal{C}_{t}, \mathcal{H}_{t}\right)=\operatorname{LSTM}\left(\mathcal{X}_{t},\left(\mathcal{C}_{t-1}, \mathcal{H}_{t-1}\right) ; \mathcal{W}, b ; *\right) (Ct,Ht)=LSTM(Xt,(Ct−1,Ht−1);W,b;∗)
2.2 CubicLSTM
2.2.1 结构
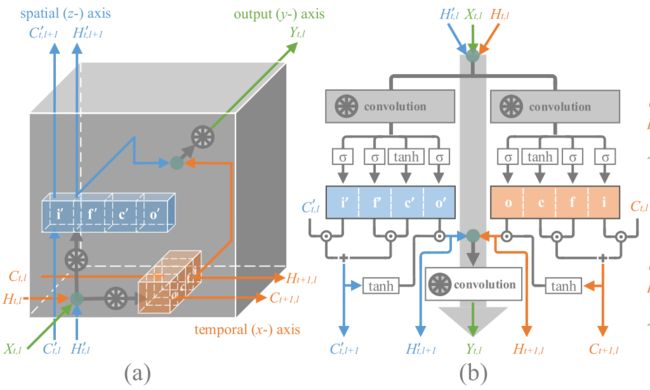
左面是一个立体图,很难看明白其中的结构,咱们主要看右边的b,拓扑图。
整理的cell最主要的特点是将temporal和spatial的信息分开处理,即左图中的sptial axis和temporal axis两个轴方向。
CnbicLSTM包括三个branch:temporal branch, spatial branch, output branch,顾名思义temporal branch主要是获得动作的,也就是目标之间的变化即时间的运动信息,spatial branch主要是获取本身目标的结构信息即目标空间信息,output branch就是把二者做了个整合,之后输出prediction

再仔细看一下结构,感觉不需要多说,这幅图画的很清楚了,大致来讲就是蓝色为spatial,橘黄色为temporal。
可以看到空间上,主要是layer的变化,也就是L->L+1,而时间上主要是step的变化,也就是t->t+1
大致说下流程,就是temporal的hidden state和spatial的hidden state以及输入x经过两个conv分别得到时间维度和空间维度的三个门控以及内部状态,之后接下来的各种操作和convLSTM里面基本上一样,最后得到两个hidden state经过conv得到最终的Yt
其实换一个角度本篇的这个结构本质上就是个两个convLSTM的拼接cell,只是生成门控的输入为三个值所决定的。
所以公式也很好得出。
2.2.2 公式
CubicLSTM { temporal branch : ( C t , l , H t , l ) = LSTM ( X t , l , H t , l − 1 ′ , ( C t − 1 , l , H t − 1 , l ) ; W , b ; ∗ ) spatial branch : ( C t , l ′ , H t , l ′ ) = LSTM ( X t , l , H t − 1 , l , ( C t , l − 1 ′ , H t , l − 1 ′ ) ; W ′ , b ′ ; ∗ ) output branch : Y t , l = W ′ ′ ∗ [ H t , l , H t , l ′ ] + b ′ ′ \text { CubicLSTM }\left\{\begin{array}{l} \text { temporal branch }:\left(\mathcal{C}_{t, l}, \mathcal{H}_{t, l}\right)=\operatorname{LSTM}\left(\mathcal{X}_{t, l}, \mathcal{H}_{t, l-1}^{\prime},\left(\mathcal{C}_{t-1, l}, \mathcal{H}_{t-1, l}\right) ; \mathcal{W}, b ; *\right) \\ \text { spatial branch : }\left(\mathcal{C}_{t, l}^{\prime}, \mathcal{H}_{t, l}^{\prime}\right)=\operatorname{LSTM}\left(\mathcal{X}_{t, l}, \mathcal{H}_{t-1, l},\left(\mathcal{C}_{t, l-1}^{\prime}, \mathcal{H}_{t, l-1}^{\prime}\right) ; \mathcal{W}^{\prime}, b^{\prime} ; *\right) \\ \text { output branch : } \mathcal{Y}_{t, l}=\mathcal{W}^{\prime \prime} *\left[\mathcal{H}_{t, l}, \mathcal{H}_{t, l}^{\prime}\right]+b^{\prime \prime} \end{array}\right. CubicLSTM ⎩⎪⎪⎪⎨⎪⎪⎪⎧ temporal branch :(Ct,l,Ht,l)=LSTM(Xt,l,Ht,l−1′,(Ct−1,l,Ht−1,l);W,b;∗) spatial branch : (Ct,l′,Ht,l′)=LSTM(Xt,l,Ht−1,l,(Ct,l−1′,Ht,l−1′);W′,b′;∗) output branch : Yt,l=W′′∗[Ht,l,Ht,l′]+b′′
2.2.3 Cubic RNN
这种rnn的提出少不了stacking结构。
我们先看个细节图,玩多了rnn的应该都清楚一般来说temporal的轴线,也就是time step的逐步处理的时候temporal的参数肯定是共享的。
所以下图其实就是一个两层的结构,即红框中的结构
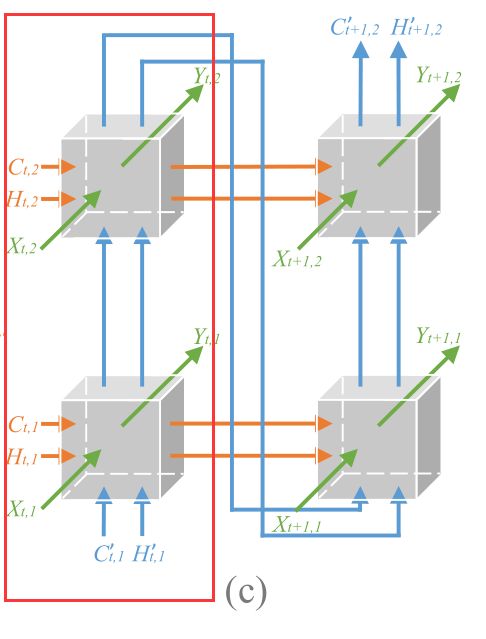
除了这个以外,在spatial上叠加几层,也是为了让objection的信息更加突出,得到更好的空间信息。
并且前一步的spatial的信息会传给下一步的最初的层,即蓝色线部分。

这个输入设计的就很有趣了,因为层数主要代表的是spatial,如图这么输入的话也就是说每层考虑了之前的临近的objection的信息,相当于多了一些目标的信息,这个输入称之为slide window。
预测规律如图所示。

这个结构总体来讲就很有趣了,看着像个立体的网
三、Experiments
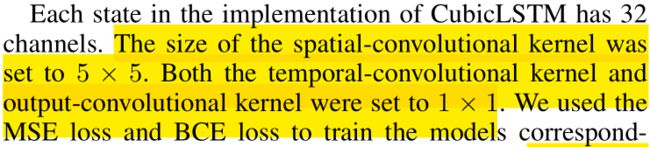
还是做得Moving MNIST数据集,和predrnn++做的类似,应用了三个数字和两个数字的序列图,以及应用了mse和bce两个评价指标
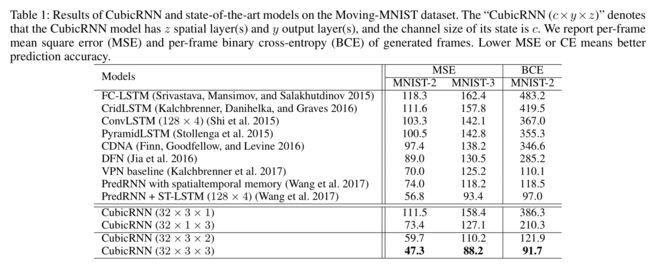
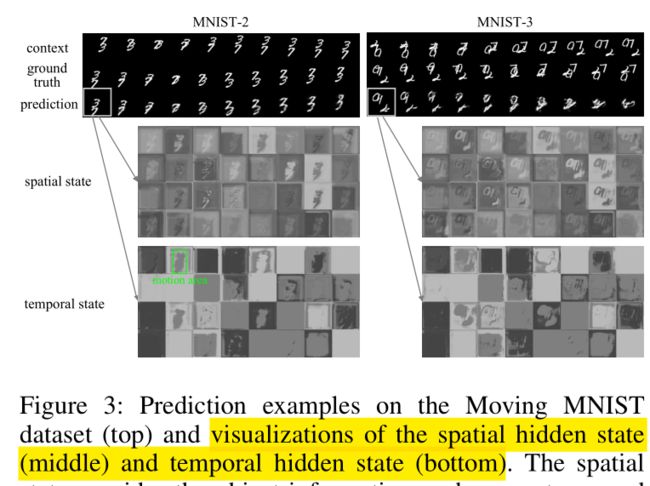
也做了一些可视化工作。
四、Conclusions
- 文中其实强调了很多次convlstm的目前无法动摇的地位,之后决定在convlstm上做创新,想到的点子出发点就是如何把temporal和spatial分开
- 分开之后分别得到c和h,经过前后各一个conv得到门控和c以及最终融合h得到最终的prediction
- 把结构设计为了一个立体的结构,和平时的平面有一些不同,所以在stacking的时候会感觉像一个立体的网一样的结构