动手学习深度学习-----笔记二
1 过拟合、欠拟合及其解决方案
- 一类是模型无法得到较低的训练误差,我们将这一现象称作欠拟合(underfitting);
- 另一类是模型的训练误差远小于它在测试数据集上的误差,我们称该现象为过拟合(overfitting)。训练误差(training error)指模型在训练数据集上表现出的误差和泛化误差(generalization error)。指模型在任意一个测试数据样本上表现出的误差的期望,并常常通过测试数据集上的误差来近似。
在实践中,我们要尽可能同时应对欠拟合和过拟合。虽然有很多因素可能导致这两种拟合问题,在这里我们重点讨论两个因素:模型复杂度和训练数据集大小。
给定训练数据集,模型复杂度和误差之间的关系:

一般来说,如果训练数据集中样本数过少,特别是比模型参数数量(按元素计)更少时,过拟合更容易发生。此外,泛化误差不会随训练数据集里样本数量增加而增大。
1.1 权重衰减方法
权重衰减等价于 L 2 L_2 L2 范数正则化(regularization)。正则化通过为模型损失函数添加惩罚项使学出的模型参数值较小,是应对过拟合的常用手段。
1.1.1 L2 范数正则化(regularization)
L 2 L_2 L2范数正则化在模型原损失函数基础上添加 L 2 L_2 L2范数惩罚项,从而得到训练所需要最小化的函数。 L 2 L_2 L2范数惩罚项指的是模型权重参数每个元素的平方和与一个正的常数的乘积。以线性回归中的线性回归损失函数为例
ℓ ( w 1 , w 2 , b ) = 1 n ∑ i = 1 n 1 2 ( x 1 ( i ) w 1 + x 2 ( i ) w 2 + b − y ( i ) ) 2 \ell(w_1, w_2, b) = \frac{1}{n} \sum_{i=1}^n \frac{1}{2}\left(x_1^{(i)} w_1 + x_2^{(i)} w_2 + b - y^{(i)}\right)^2 ℓ(w1,w2,b)=n1i=1∑n21(x1(i)w1+x2(i)w2+b−y(i))2
其中 w 1 , w 2 w_1, w_2 w1,w2是权重参数, b b b是偏差参数,样本 i i i的输入为 x 1 ( i ) , x 2 ( i ) x_1^{(i)}, x_2^{(i)} x1(i),x2(i),标签为 y ( i ) y^{(i)} y(i),样本数为 n n n。将权重参数用向量 w = [ w 1 , w 2 ] \boldsymbol{w} = [w_1, w_2] w=[w1,w2]表示,带有 L 2 L_2 L2范数惩罚项的新损失函数为
ℓ ( w 1 , w 2 , b ) + λ 2 n ∣ w ∣ 2 , \ell(w_1, w_2, b) + \frac{\lambda}{2n} |\boldsymbol{w}|^2, ℓ(w1,w2,b)+2nλ∣w∣2,
其中超参数 λ > 0 \lambda > 0 λ>0。当权重参数均为0时,惩罚项最小。当 λ \lambda λ较大时,惩罚项在损失函数中的比重较大,这通常会使学到的权重参数的元素较接近0。当 λ \lambda λ设为0时,惩罚项完全不起作用。上式中 L 2 L_2 L2范数平方 ∣ w ∣ 2 |\boldsymbol{w}|^2 ∣w∣2展开后得到 w 1 2 + w 2 2 w_1^2 + w_2^2 w12+w22。
有了 L 2 L_2 L2范数惩罚项后,在小批量随机梯度下降中,我们将线性回归一节中权重 w 1 w_1 w1和 w 2 w_2 w2的迭代方式更改为
w 1 ← ( 1 − η λ ∣ B ∣ ) w 1 − η ∣ B ∣ ∑ i ∈ B x 1 ( i ) ( x 1 ( i ) w 1 + x 2 ( i ) w 2 + b − y ( i ) ) , w 2 ← ( 1 − η λ ∣ B ∣ ) w 2 − η ∣ B ∣ ∑ i ∈ B x 2 ( i ) ( x 1 ( i ) w 1 + x 2 ( i ) w 2 + b − y ( i ) ) . \begin{aligned} w_1 &\leftarrow \left(1- \frac{\eta\lambda}{|\mathcal{B}|} \right)w_1 - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}}x_1^{(i)} \left(x_1^{(i)} w_1 + x_2^{(i)} w_2 + b - y^{(i)}\right),\\ w_2 &\leftarrow \left(1- \frac{\eta\lambda}{|\mathcal{B}|} \right)w_2 - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}}x_2^{(i)} \left(x_1^{(i)} w_1 + x_2^{(i)} w_2 + b - y^{(i)}\right). \end{aligned} w1w2←(1−∣B∣ηλ)w1−∣B∣ηi∈B∑x1(i)(x1(i)w1+x2(i)w2+b−y(i)),←(1−∣B∣ηλ)w2−∣B∣ηi∈B∑x2(i)(x1(i)w1+x2(i)w2+b−y(i)).
可见, L 2 L_2 L2范数正则化令权重 w 1 w_1 w1和 w 2 w_2 w2先自乘小于1的数,再减去不含惩罚项的梯度。因此, L 2 L_2 L2范数正则化又叫权重衰减。权重衰减通过惩罚绝对值较大的模型参数为需要学习的模型增加了限制,这可能对过拟合有效。
1.2 丢弃法
多层感知机中神经网络图描述了一个单隐藏层的多层感知机。其中输入个数为4,隐藏单元个数为5,且隐藏单元 h i h_i hi( i = 1 , … , 5 i=1, \ldots, 5 i=1,…,5)的计算表达式为
h i = ϕ ( x 1 w 1 i + x 2 w 2 i + x 3 w 3 i + x 4 w 4 i + b i ) h_i = \phi\left(x_1 w_{1i} + x_2 w_{2i} + x_3 w_{3i} + x_4 w_{4i} + b_i\right) hi=ϕ(x1w1i+x2w2i+x3w3i+x4w4i+bi)
这里 ϕ \phi ϕ是激活函数, x 1 , … , x 4 x_1, \ldots, x_4 x1,…,x4是输入,隐藏单元 i i i的权重参数为 w 1 i , … , w 4 i w_{1i}, \ldots, w_{4i} w1i,…,w4i,偏差参数为 b i b_i bi。当对该隐藏层使用丢弃法时,该层的隐藏单元将有一定概率被丢弃掉。设丢弃概率为 p p p,那么有 p p p的概率 h i h_i hi会被清零,有 1 − p 1-p 1−p的概率 h i h_i hi会除以 1 − p 1-p 1−p做拉伸。丢弃概率是丢弃法的超参数。具体来说,设随机变量 ξ i \xi_i ξi为0和1的概率分别为 p p p和 1 − p 1-p 1−p。使用丢弃法时我们计算新的隐藏单元 h i ′ h_i' hi′
h i ′ = ξ i 1 − p h i h_i' = \frac{\xi_i}{1-p} h_i hi′=1−pξihi
由于 E ( ξ i ) = 1 − p E(\xi_i) = 1-p E(ξi)=1−p,因此
E ( h i ′ ) = E ( ξ i ) 1 − p h i = h i E(h_i') = \frac{E(\xi_i)}{1-p}h_i = h_i E(hi′)=1−pE(ξi)hi=hi
即丢弃法不改变其输入的期望值。让我们对之前多层感知机的神经网络中的隐藏层使用丢弃法,一种可能的结果如图所示,其中 h 2 h_2 h2和 h 5 h_5 h5被清零。这时输出值的计算不再依赖 h 2 h_2 h2和 h 5 h_5 h5,在反向传播时,与这两个隐藏单元相关的权重的梯度均为0。由于在训练中隐藏层神经元的丢弃是随机的,即 h 1 , … , h 5 h_1, \ldots, h_5 h1,…,h5都有可能被清零,输出层的计算无法过度依赖 h 1 , … , h 5 h_1, \ldots, h_5 h1,…,h5中的任一个,从而在训练模型时起到正则化的作用,并可以用来应对过拟合。在测试模型时,我们为了拿到更加确定性的结果,一般不使用丢弃法

2 梯度消失和爆炸及其他问题
深度模型有关数值稳定性的典型问题是消失(vanishing)和爆炸(explosion)。
当神经网络的层数较多时,模型的数值稳定性容易变差。
假设一个层数为 L L L的多层感知机的第 l l l层 H ( l ) \boldsymbol{H}^{(l)} H(l)的权重参数为 W ( l ) \boldsymbol{W}^{(l)} W(l),输出层 H ( L ) \boldsymbol{H}^{(L)} H(L)的权重参数为 W ( L ) \boldsymbol{W}^{(L)} W(L)。为了便于讨论,不考虑偏差参数,且设所有隐藏层的激活函数为恒等映射(identity mapping) ϕ ( x ) = x \phi(x) = x ϕ(x)=x。给定输入 X \boldsymbol{X} X,多层感知机的第 l l l层的输出 H ( l ) = X W ( 1 ) W ( 2 ) … W ( l ) \boldsymbol{H}^{(l)} = \boldsymbol{X} \boldsymbol{W}^{(1)} \boldsymbol{W}^{(2)} \ldots \boldsymbol{W}^{(l)} H(l)=XW(1)W(2)…W(l)。此时,如果层数 l l l较大, H ( l ) \boldsymbol{H}^{(l)} H(l)的计算可能会出现衰减或爆炸。举个例子,假设输入和所有层的权重参数都是标量,如权重参数为0.2和5,多层感知机的第30层输出为输入 X \boldsymbol{X} X分别与 0. 2 30 ≈ 1 × 1 0 − 21 0.2^{30} \approx 1 \times 10^{-21} 0.230≈1×10−21(消失)和 5 30 ≈ 9 × 1 0 20 5^{30} \approx 9 \times 10^{20} 530≈9×1020(爆炸)的乘积。当层数较多时,梯度的计算也容易出现消失或爆炸。
2.1 随机初始化模型参数
在神经网络中,通常需要随机初始化模型参数。多层感知机假设输出层只保留一个输出单元 o 1 o_1 o1(删去 o 2 o_2 o2和 o 3 o_3 o3以及指向它们的箭头),且隐藏层使用相同的激活函数。如果将每个隐藏单元的参数都初始化为相等的值,那么在正向传播时每个隐藏单元将根据相同的输入计算出相同的值,并传递至输出层。在反向传播中,每个隐藏单元的参数梯度值相等。因此,这些参数在使用基于梯度的优化算法迭代后值依然相等。之后的迭代也是如此。在这种情况下,无论隐藏单元有多少,隐藏层本质上只有1个隐藏单元在发挥作用。因此,正如在前面的实验中所做的那样,我们通常将神经网络的模型参数,特别是权重参数,进行随机初始化。

2.1.1 PyTorch的默认随机初始化
随机初始化模型参数的方法有很多。在线性回归的简洁实现中,使用torch.nn.init.normal_()使模型net的权重参数采用正态分布的随机初始化方式。不过,PyTorch中nn.Module的模块参数都采取了较为合理的初始化策略(不同类型的layer具体采样的哪一种初始化方法的可参考源代码),因此一般不用我们考虑。
2.1.2 Xavier随机初始化
还有一种比较常用的随机初始化方法叫作Xavier随机初始化。
假设某全连接层的输入个数为 a a a,输出个数为 b b b,Xavier随机初始化将使该层中权重参数的每个元素都随机采样于均匀分布
U ( − 6 a + b , 6 a + b ) . U\left(-\sqrt{\frac{6}{a+b}}, \sqrt{\frac{6}{a+b}}\right). U(−a+b6,a+b6).
它的设计主要考虑到,模型参数初始化后,每层输出的方差不该受该层输入个数影响,且每层梯度的方差也不该受该层输出个数影响。
2.2 考虑环境因素
2.2.1 协变量偏移
这里我们假设,虽然输入的分布可能随时间而改变,但是标记函数,即条件分布P(y∣x)不会改变。虽然这个问题容易理解,但在实践中也容易忽视。
想想区分猫和狗的一个例子。我们的训练数据使用的是猫和狗的真实的照片,但是在测试时,我们被要求对猫和狗的卡通图片进行分类。
| cat | cat | dog | dog |
|---|---|---|---|
 |
 |
 |
 |
测试数据:
| cat | cat | dog | dog |
|---|---|---|---|
 |
 |
 |
 |
显然,这不太可能奏效。训练集由照片组成,而测试集只包含卡通。在一个看起来与测试集有着本质不同的数据集上进行训练,而不考虑如何适应新的情况,这是不是一个好主意。不幸的是,这是一个非常常见的陷阱。
统计学家称这种协变量变化是因为问题的根源在于特征分布的变化(即协变量的变化)。数学上,我们可以说P(x)改变了,但P(y∣x)保持不变。尽管它的有用性并不局限于此,当我们认为x导致y时,协变量移位通常是正确的假设。
2.2.2 标签偏移
当我们认为导致偏移的是标签P(y)上的边缘分布的变化,但类条件分布是不变的P(x∣y)时,就会出现相反的问题。当我们认为y导致x时,标签偏移是一个合理的假设。例如,通常我们希望根据其表现来预测诊断结果。在这种情况下,我们认为诊断引起的表现,即疾病引起的症状。有时标签偏移和协变量移位假设可以同时成立。例如,当真正的标签函数是确定的和不变的,那么协变量偏移将始终保持,包括如果标签偏移也保持。有趣的是,当我们期望标签偏移和协变量偏移保持时,使用来自标签偏移假设的方法通常是有利的。这是因为这些方法倾向于操作看起来像标签的对象,这(在深度学习中)与处理看起来像输入的对象(在深度学习中)相比相对容易一些。
病因(要预测的诊断结果)导致 症状(观察到的结果)。
训练数据集,数据很少只包含流感p(y)的样本。
而测试数据集有流感p(y)和流感q(y),其中不变的是流感症状p(x|y)。
2.2.3 概念偏移
另一个相关的问题出现在概念转换中,即标签本身的定义发生变化的情况。这听起来很奇怪,毕竟猫就是猫。的确,猫的定义可能不会改变,但我们能不能对软饮料也这么说呢?事实证明,如果我们周游美国,按地理位置转移数据来源,我们会发现,即使是如图所示的这个简单术语的定义也会发生相当大的概念转变。

美 国 软 饮 料 名 称 的 概 念 转 变 美国软饮料名称的概念转变 美国软饮料名称的概念转变
如果我们要建立一个机器翻译系统,分布P(y∣x)可能因我们的位置而异。这个问题很难发现。另一个可取之处是P(y∣x)通常只是逐渐变化。
3 卷积神经网络基础
3.1二维卷积层
3.1.1 二维互相关运算
二维互相关(cross-correlation)运算的输入是一个二维输入数组和一个二维核(kernel)数组,输出也是一个二维数组,其中核数组通常称为卷积核或过滤器(filter)。卷积核的尺寸通常小于输入数组,卷积核在输入数组上滑动,在每个位置上,卷积核与该位置处的输入子数组按元素相乘并求和,得到输出数组中相应位置的元素。图1展示了一个互相关运算的例子,阴影部分分别是输入的第一个计算区域、核数组以及对应的输出。

图1 二维互相关运算
下面我们用corr2d函数实现二维互相关运算,它接受输入数组X与核数组K,并输出数组Y。
import torch
import torch.nn as nn
def corr2d(X, K):
H, W = X.shape
h, w = K.shape
Y = torch.zeros(H - h + 1, W - w + 1)
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i: i + h, j: j + w] * K).sum()
return Y
构造上图中的输入数组X、核数组K来验证二维互相关运算的输出。
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]])
K = torch.tensor([[0, 1], [2, 3]])
Y = corr2d(X, K)
print(Y)
tensor([[19., 25.],
[37., 43.]])
3.1.2 二维卷积层
二维卷积层将输入和卷积核做互相关运算,并加上一个标量偏置来得到输出。卷积层的模型参数包括卷积核和标量偏置。
class Conv2D(nn.Module):
def __init__(self, kernel_size):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.randn(kernel_size))
self.bias = nn.Parameter(torch.randn(1))
def forward(self, x):
return corr2d(x, self.weight) + self.bias
3.1.3 互相关运算与卷积运算
卷积层得名于卷积运算,但卷积层中用到的并非卷积运算而是互相关运算。我们将核数组上下翻转、左右翻转,再与输入数组做互相关运算,这一过程就是卷积运算。由于卷积层的核数组是可学习的,所以使用互相关运算与使用卷积运算并无本质区别。
3.1.4 特征图与感受野
二维卷积层输出的二维数组可以看作是输入在空间维度(宽和高)上某一级的表征,也叫特征图(feature map)。影响元素 x x x的前向计算的所有可能输入区域(可能大于输入的实际尺寸)叫做 x x x的感受野(receptive field)。
以图1为例,输入中阴影部分的四个元素是输出中阴影部分元素的感受野。我们将图中形状为 2 × 2 2 \times 2 2×2的输出记为 Y Y Y,将 Y Y Y与另一个形状为 2 × 2 2 \times 2 2×2的核数组做互相关运算,输出单个元素 z z z。那么, z z z在 Y Y Y上的感受野包括 Y Y Y的全部四个元素,在输入上的感受野包括其中全部9个元素。可见,我们可以通过更深的卷积神经网络使特征图中单个元素的感受野变得更加广阔,从而捕捉输入上更大尺寸的特征。
3.2 填充和步幅
我们介绍卷积层的两个超参数,即填充和步幅,它们可以对给定形状的输入和卷积核改变输出形状。
3.2.1填充
填充(padding)是指在输入高和宽的两侧填充元素(通常是0元素),图2里我们在原输入高和宽的两侧分别添加了值为0的元素。

图2 在输入的高和宽两侧分别填充了0元素的二维互相关计算
如果原输入的高和宽是 n h n_h nh和 n w n_w nw,卷积核的高和宽是 k h k_h kh和 k w k_w kw,在高的两侧一共填充 p h p_h ph行,在宽的两侧一共填充 p w p_w pw列,则输出形状为:
$$
(n_h+p_h-k_h+1)\times(n_w+p_w-k_w+1)
$$
我们在卷积神经网络中使用奇数高宽的核,比如 3 × 3 3 \times 3 3×3, 5 × 5 5 \times 5 5×5的卷积核,对于高度(或宽度)为大小为 2 k + 1 2 k + 1 2k+1的核,令步幅为1,在高(或宽)两侧选择大小为 k k k的填充,便可保持输入与输出尺寸相同。
3.2.2步幅
在互相关运算中,卷积核在输入数组上滑动,每次滑动的行数与列数即是步幅(stride)。此前我们使用的步幅都是1,图3展示了在高上步幅为3、在宽上步幅为2的二维互相关运算。

图3 高和宽上步幅分别为3和2的二维互相关运算
一般来说,当高上步幅为 s h s_h sh,宽上步幅为 s w s_w sw时,输出形状为:
$$
\lfloor(n_h+p_h-k_h+s_h)/s_h\rfloor \times \lfloor(n_w+p_w-k_w+s_w)/s_w\rfloor
$$
如果 p h = k h − 1 p_h=k_h-1 ph=kh−1, p w = k w − 1 p_w=k_w-1 pw=kw−1,那么输出形状将简化为 ⌊ ( n h + s h − 1 ) / s h ⌋ × ⌊ ( n w + s w − 1 ) / s w ⌋ \lfloor(n_h+s_h-1)/s_h\rfloor \times \lfloor(n_w+s_w-1)/s_w\rfloor ⌊(nh+sh−1)/sh⌋×⌊(nw+sw−1)/sw⌋。更进一步,如果输入的高和宽能分别被高和宽上的步幅整除,那么输出形状将是 ( n h / s h ) × ( n w / s w ) (n_h / s_h) \times (n_w/s_w) (nh/sh)×(nw/sw)。
当 p h = p w = p p_h = p_w = p ph=pw=p时,我们称填充为 p p p;当 s h = s w = s s_h = s_w = s sh=sw=s时,我们称步幅为 s s s。
3.3 多输入通道和多输出通道
之前的输入和输出都是二维数组,但真实数据的维度经常更高。例如,彩色图像在高和宽2个维度外还有RGB(红、绿、蓝)3个颜色通道。假设彩色图像的高和宽分别是 h h h和 w w w(像素),那么它可以表示为一个 3 × h × w 3 \times h \times w 3×h×w的多维数组,我们将大小为3的这一维称为通道(channel)维。
3.3.1 多输入通道
卷积层的输入可以包含多个通道,图4展示了一个含2个输入通道的二维互相关计算的例子。

图4 含2个输入通道的互相关计算
假设输入数据的通道数为 c i c_i ci,卷积核形状为 k h × k w k_h\times k_w kh×kw,我们为每个输入通道各分配一个形状为 k h × k w k_h\times k_w kh×kw的核数组,将 c i c_i ci个互相关运算的二维输出按通道相加,得到一个二维数组作为输出。我们把 c i c_i ci个核数组在通道维上连结,即得到一个形状为 c i × k h × k w c_i\times k_h\times k_w ci×kh×kw的卷积核。
3.3.2多输出通道
卷积层的输出也可以包含多个通道,设卷积核输入通道数和输出通道数分别为 c i c_i ci和 c o c_o co,高和宽分别为 k h k_h kh和 k w k_w kw。如果希望得到含多个通道的输出,我们可以为每个输出通道分别创建形状为 c i × k h × k w c_i\times k_h\times k_w ci×kh×kw的核数组,将它们在输出通道维上连结,卷积核的形状即 c o × c i × k h × k w c_o\times c_i\times k_h\times k_w co×ci×kh×kw。
对于输出通道的卷积核,我们提供这样一种理解,一个 c i × k h × k w c_i \times k_h \times k_w ci×kh×kw的核数组可以提取某种局部特征,但是输入可能具有相当丰富的特征,我们需要有多个这样的 c i × k h × k w c_i \times k_h \times k_w ci×kh×kw的核数组,不同的核数组提取的是不同的特征。
3.3.3 1x1卷积层
最后讨论形状为 1 × 1 1 \times 1 1×1的卷积核,我们通常称这样的卷积运算为 1 × 1 1 \times 1 1×1卷积,称包含这种卷积核的卷积层为 1 × 1 1 \times 1 1×1卷积层。图5展示了使用输入通道数为3、输出通道数为2的 1 × 1 1\times 1 1×1卷积核的互相关计算。

图5 1x1卷积核的互相关计算。输入和输出具有相同的高和宽
1 × 1 1 \times 1 1×1卷积核可在不改变高宽的情况下,调整通道数。 1 × 1 1 \times 1 1×1卷积核不识别高和宽维度上相邻元素构成的模式,其主要计算发生在通道维上。假设我们将通道维当作特征维,将高和宽维度上的元素当成数据样本,那么 1 × 1 1\times 1 1×1卷积层的作用与全连接层等价。
3.4 卷积层与全连接层的对比
二维卷积层经常用于处理图像,与此前的全连接层相比,它主要有两个优势:
一是全连接层把图像展平成一个向量,在输入图像上相邻的元素可能因为展平操作不再相邻,网络难以捕捉局部信息。而卷积层的设计,天然地具有提取局部信息的能力。
二是卷积层的参数量更少。不考虑偏置的情况下,一个形状为 ( c i , c o , h , w ) (c_i, c_o, h, w) (ci,co,h,w)的卷积核的参数量是 c i × c o × h × w c_i \times c_o \times h \times w ci×co×h×w,与输入图像的宽高无关。假如一个卷积层的输入和输出形状分别是 ( c 1 , h 1 , w 1 ) (c_1, h_1, w_1) (c1,h1,w1)和 ( c 2 , h 2 , w 2 ) (c_2, h_2, w_2) (c2,h2,w2),如果要用全连接层进行连接,参数数量就是 c 1 × c 2 × h 1 × w 1 × h 2 × w 2 c_1 \times c_2 \times h_1 \times w_1 \times h_2 \times w_2 c1×c2×h1×w1×h2×w2。使用卷积层可以以较少的参数数量来处理更大的图像。
3.5 卷积层的简洁实现
我们使用Pytorch中的nn.Conv2d类来实现二维卷积层,主要关注以下几个构造函数参数:
in_channels(python:int) – Number of channels in the input imagout_channels(python:int) – Number of channels produced by the convolutionkernel_size(python:int or tuple) – Size of the convolving kernelstride(python:int or tuple, optional) – Stride of the convolution. Default: 1padding(python:int or tuple, optional) – Zero-padding added to both sides of the input. Default: 0bias(bool, optional) – If True, adds a learnable bias to the output. Default: True
forward函数的参数为一个四维张量,形状为 ( N , C i n , H i n , W i n ) (N, C_{in}, H_{in}, W_{in}) (N,Cin,Hin,Win),返回值也是一个四维张量,形状为 ( N , C o u t , H o u t , W o u t ) (N, C_{out}, H_{out}, W_{out}) (N,Cout,Hout,Wout),其中 N N N是批量大小, C , H , W C, H, W C,H,W分别表示通道数、高度、宽度。
代码讲解
X = torch.rand(4, 2, 3, 5)
print(X.shape)
conv2d = nn.Conv2d(in_channels=2, out_channels=3, kernel_size=(3, 5), stride=1, padding=(1, 2))
Y = conv2d(X)
print('Y.shape: ', Y.shape)
print('weight.shape: ', conv2d.weight.shape)
print('bias.shape: ', conv2d.bias.shape)
torch.Size([4, 2, 3, 5])
Y.shape: torch.Size([4, 3, 3, 5])
weight.shape: torch.Size([3, 2, 3, 5])
bias.shape: torch.Size([3])
3.6 池化
3.6.1 二维池化层
池化层主要用于缓解卷积层对位置的过度敏感性。同卷积层一样,池化层每次对输入数据的一个固定形状窗口(又称池化窗口)中的元素计算输出,池化层直接计算池化窗口内元素的最大值或者平均值,该运算也分别叫做最大池化或平均池化。图6展示了池化窗口形状为 2 × 2 2\times 2 2×2的最大池化。

图6 池化窗口形状为 2 x 2 的最大池化
二维平均池化的工作原理与二维最大池化类似,但将最大运算符替换成平均运算符。池化窗口形状为 p × q p \times q p×q的池化层称为 p × q p \times q p×q池化层,其中的池化运算叫作 p × q p \times q p×q池化。
池化层也可以在输入的高和宽两侧填充并调整窗口的移动步幅来改变输出形状。池化层填充和步幅与卷积层填充和步幅的工作机制一样。
在处理多通道输入数据时,池化层对每个输入通道分别池化,但不会像卷积层那样将各通道的结果按通道相加。这意味着池化层的输出通道数与输入通道数相等。
3.6.2 池化层的简洁实现
我们使用Pytorch中的nn.MaxPool2d实现最大池化层,关注以下构造函数参数:
kernel_size– the size of the window to take a max overstride– the stride of the window. Default value is kernel_sizepadding– implicit zero padding to be added on both sides
forward函数的参数为一个四维张量,形状为 ( N , C , H i n , W i n ) (N, C, H_{in}, W_{in}) (N,C,Hin,Win),返回值也是一个四维张量,形状为 ( N , C , H o u t , W o u t ) (N, C, H_{out}, W_{out}) (N,C,Hout,Wout),其中 N N N是批量大小, C , H , W C, H, W C,H,W分别表示通道数、高度、宽度。
代码讲解
X = torch.arange(32, dtype=torch.float32).view(1, 2, 4, 4)
pool2d = nn.MaxPool2d(kernel_size=3, padding=1, stride=(2, 1))
Y = pool2d(X)
print(X)
print(Y)
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]],
[[16., 17., 18., 19.],
[20., 21., 22., 23.],
[24., 25., 26., 27.],
[28., 29., 30., 31.]]]])
tensor([[[[ 5., 6., 7., 7.],
[13., 14., 15., 15.]],
[[21., 22., 23., 23.],
[29., 30., 31., 31.]]]])
平均池化层使用的是nn.AvgPool2d,使用方法与nn.MaxPool2d相同。
使用全连接层的局限性:
- 图像在同一列邻近的像素在这个向量中可能相距较远。它们构成的模式可能难以被模型识别。
- 对于大尺寸的输入图像,使用全连接层容易导致模型过大。
使用卷积层的优势:
- 卷积层保留输入形状。
- 卷积层通过滑动窗口将同一卷积核与不同位置的输入重复计算,从而避免参数尺寸过大。
4 LeNet 模型
LeNet分为卷积层块和全连接层块两个部分。下面我们分别介绍这两个模块。

卷积层块里的基本单位是卷积层后接平均池化层:卷积层用来识别图像里的空间模式,如线条和物体局部,之后的平均池化层则用来降低卷积层对位置的敏感性。
卷积层块由两个这样的基本单位重复堆叠构成。在卷积层块中,每个卷积层都使用 5 × 5 5 \times 5 5×5的窗口,并在输出上使用sigmoid激活函数。第一个卷积层输出通道数为6,第二个卷积层输出通道数则增加到16。
全连接层块含3个全连接层。它们的输出个数分别是120、84和10,其中10为输出的类别个数。
下面我们通过Sequential类来实现LeNet模型。
#import
import sys
sys.path.append("/home/kesci/input")
import d2lzh1981 as d2l
import torch
import torch.nn as nn
import torch.optim as optim
import time
#net
class Flatten(torch.nn.Module): #展平操作
def forward(self, x):
return x.view(x.shape[0], -1)
class Reshape(torch.nn.Module): #将图像大小重定型
def forward(self, x):
return x.view(-1,1,28,28) #(B x C x H x W)
net = torch.nn.Sequential( #Lelet
Reshape(),
nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5, padding=2), #b*1*28*28 =>b*6*28*28
nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), #b*6*28*28 =>b*6*14*14
nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5), #b*6*14*14 =>b*16*10*10
nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), #b*16*10*10 => b*16*5*5
Flatten(), #b*16*5*5 => b*400
nn.Linear(in_features=16*5*5, out_features=120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.Sigmoid(),
nn.Linear(84, 10)
)
接下来我们构造一个高和宽均为28的单通道数据样本,并逐层进行前向计算来查看每个层的输出形状。
#print
X = torch.randn(size=(1,1,28,28), dtype = torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)
Reshape output shape: torch.Size([1, 1, 28, 28])
Conv2d output shape: torch.Size([1, 6, 28, 28])
Sigmoid output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])
Conv2d output shape: torch.Size([1, 16, 10, 10])
Sigmoid output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Flatten output shape: torch.Size([1, 400])
Linear output shape: torch.Size([1, 120])
Sigmoid output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Sigmoid output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])
可以看到,在卷积层块中输入的高和宽在逐层减小。卷积层由于使用高和宽均为5的卷积核,从而将高和宽分别减小4,而池化层则将高和宽减半,但通道数则从1增加到16。全连接层则逐层减少输出个数,直到变成图像的类别数10。

卷积神经网络就是含卷积层的网络。
LeNet交替使用卷积层和最大池化层后接全连接层来进行图像分类。
5 深度卷积神经网络(AlexNet)
LeNet: 在大的真实数据集上的表现并不尽如⼈意。
1.神经网络计算复杂。
2.还没有⼤量深⼊研究参数初始化和⾮凸优化算法等诸多领域。
机器学习的特征提取:手工定义的特征提取函数
神经网络的特征提取:通过学习得到数据的多级表征,并逐级表⽰越来越抽象的概念或模式。
神经网络发展的限制:数据、硬件
5 .1 AlexNet
首次证明了学习到的特征可以超越⼿⼯设计的特征,从而⼀举打破计算机视觉研究的前状。
特征:
- 8层变换,其中有5层卷积和2层全连接隐藏层,以及1个全连接输出层。
- 将sigmoid激活函数改成了更加简单的ReLU激活函数。
- 用Dropout来控制全连接层的模型复杂度。
- 引入数据增强,如翻转、裁剪和颜色变化,从而进一步扩大数据集来缓解过拟合。

#目前GPU算力资源预计17日上线,在此之前本代码只能使用CPU运行。
#考虑到本代码中的模型过大,CPU训练较慢,
#我们还将代码上传了一份到 https://www.kaggle.com/boyuai/boyu-d2l-modernconvolutionalnetwork
#如希望提前使用gpu运行请至kaggle。
import time
import torch
from torch import nn, optim
import torchvision
import numpy as np
import sys
sys.path.append("/home/kesci/input/")
import d2lzh1981 as d2l
import os
import torch.nn.functional as F
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class AlexNet(nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 96, 11, 4), # in_channels, out_channels, kernel_size, stride, padding
nn.ReLU(),
nn.MaxPool2d(3, 2), # kernel_size, stride
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(3, 2),
# 连续3个卷积层,且使用更小的卷积窗口。除了最后的卷积层外,进一步增大了输出通道数。
# 前两个卷积层后不使用池化层来减小输入的高和宽
nn.Conv2d(256, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 256, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(3, 2)
)
# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合
self.fc = nn.Sequential(
nn.Linear(256*5*5, 4096),
nn.ReLU(),
nn.Dropout(0.5),
#由于使用CPU镜像,精简网络,若为GPU镜像可添加该层
#nn.Linear(4096, 4096),
#nn.ReLU(),
#nn.Dropout(0.5),
# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10),
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
net = AlexNet()
print(net)
AlexNet(
(conv): Sequential(
(0): Conv2d(1, 96, kernel_size=(11, 11), stride=(4, 4))
(1): ReLU()
(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(96, 256, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(4): ReLU()
(5): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(256, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU()
(8): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): ReLU()
(10): Conv2d(384, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU()
(12): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): Linear(in_features=6400, out_features=4096, bias=True)
(1): ReLU()
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=10, bias=True)
)
)
载入数据集
# 本函数已保存在d2lzh_pytorch包中方便以后使用
def load_data_fashion_mnist(batch_size, resize=None, root='/home/kesci/input/FashionMNIST2065'):
"""Download the fashion mnist dataset and then load into memory."""
trans = []
if resize:
trans.append(torchvision.transforms.Resize(size=resize))
trans.append(torchvision.transforms.ToTensor())
transform = torchvision.transforms.Compose(trans)
mnist_train = torchvision.datasets.FashionMNIST(root=root, train=True, download=True, transform=transform)
mnist_test = torchvision.datasets.FashionMNIST(root=root, train=False, download=True, transform=transform)
train_iter = torch.utils.data.DataLoader(mnist_train, batch_size=batch_size, shuffle=True, num_workers=2)
test_iter = torch.utils.data.DataLoader(mnist_test, batch_size=batch_size, shuffle=False, num_workers=2)
return train_iter, test_iter
#batchsize=128
batch_size = 16
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = load_data_fashion_mnist(batch_size,224)
for X, Y in train_iter:
print('X =', X.shape,
'\nY =', Y.type(torch.int32))
break
X = torch.Size([16, 1, 224, 224])
Y = tensor([5, 2, 9, 3, 1, 8, 3, 3, 2, 6, 1, 6, 2, 4, 4, 8], dtype=torch.int32)
训练
lr, num_epochs = 0.001, 3
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
5.2 使用重复元素的网络(VGG)
VGG:通过重复使⽤简单的基础块来构建深度模型。
Block:数个相同的填充为1、窗口形状为 3 × 3 3\times 3 3×3的卷积层,接上一个步幅为2、窗口形状为 2 × 2 2\times 2 2×2的最大池化层。
卷积层保持输入的高和宽不变,而池化层则对其减半。

5.2.1 VGG11的简单实现
def vgg_block(num_convs, in_channels, out_channels): #卷积层个数,输入通道数,输出通道数
blk = []
for i in range(num_convs):
if i == 0:
blk.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
else:
blk.append(nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1))
blk.append(nn.ReLU())
blk.append(nn.MaxPool2d(kernel_size=2, stride=2)) # 这里会使宽高减半
return nn.Sequential(*blk)
conv_arch = ((1, 1, 64), (1, 64, 128), (2, 128, 256), (2, 256, 512), (2, 512, 512))
# 经过5个vgg_block, 宽高会减半5次, 变成 224/32 = 7
fc_features = 512 * 7 * 7 # c * w * h
fc_hidden_units = 4096 # 任意
def vgg(conv_arch, fc_features, fc_hidden_units=4096):
net = nn.Sequential()
# 卷积层部分
for i, (num_convs, in_channels, out_channels) in enumerate(conv_arch):
# 每经过一个vgg_block都会使宽高减半
net.add_module("vgg_block_" + str(i+1), vgg_block(num_convs, in_channels, out_channels))
# 全连接层部分
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(),
nn.Linear(fc_features, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, 10)
))
return net
net = vgg(conv_arch, fc_features, fc_hidden_units)
X = torch.rand(1, 1, 224, 224)
# named_children获取一级子模块及其名字(named_modules会返回所有子模块,包括子模块的子模块)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
vgg_block_1 output shape: torch.Size([1, 64, 112, 112])
vgg_block_2 output shape: torch.Size([1, 128, 56, 56])
vgg_block_3 output shape: torch.Size([1, 256, 28, 28])
vgg_block_4 output shape: torch.Size([1, 512, 14, 14])
vgg_block_5 output shape: torch.Size([1, 512, 7, 7])
fc output shape: torch.Size([1, 10])
ratio = 8
small_conv_arch = [(1, 1, 64//ratio), (1, 64//ratio, 128//ratio), (2, 128//ratio, 256//ratio),
(2, 256//ratio, 512//ratio), (2, 512//ratio, 512//ratio)]
net = vgg(small_conv_arch, fc_features // ratio, fc_hidden_units // ratio)
print(net)
Sequential(
(vgg_block_1): Sequential(
(0): Conv2d(1, 8, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_2): Sequential(
(0): Conv2d(8, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_3): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_4): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_5): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): FlattenLayer()
(1): Linear(in_features=3136, out_features=512, bias=True)
(2): ReLU()
(3): Dropout(p=0.5, inplace=False)
(4): Linear(in_features=512, out_features=512, bias=True)
(5): ReLU()
(6): Dropout(p=0.5, inplace=False)
(7): Linear(in_features=512, out_features=10, bias=True)
)
)
batchsize=16
#batch_size = 64
# 如出现“out of memory”的报错信息,可减小batch_size或resize
# train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
5.3 ⽹络中的⽹络(NiN)
LeNet、AlexNet和VGG:先以由卷积层构成的模块充分抽取 空间特征,再以由全连接层构成的模块来输出分类结果。
NiN:串联多个由卷积层和“全连接”层构成的小⽹络来构建⼀个深层⽹络。
⽤了输出通道数等于标签类别数的NiN块,然后使⽤全局平均池化层对每个通道中所有元素求平均并直接⽤于分类。

1×1卷积核作用
1.放缩通道数:通过控制卷积核的数量达到通道数的放缩。
2.增加非线性。1×1卷积核的卷积过程相当于全连接层的计算过程,并且还加入了非线性激活函数,从而可以增加网络的非线性。
3.计算参数少
def nin_block(in_channels, out_channels, kernel_size, stride, padding):
blk = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU())
return blk
# 已保存在d2lzh_pytorch
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, stride=4, padding=0),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(96, 256, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(256, 384, kernel_size=3, stride=1, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, stride=1, padding=1),
GlobalAvgPool2d(),
# 将四维的输出转成二维的输出,其形状为(批量大小, 10)
d2l.FlattenLayer())
X = torch.rand(1, 1, 224, 224)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
0 output shape: torch.Size([1, 96, 54, 54])
1 output shape: torch.Size([1, 96, 26, 26])
2 output shape: torch.Size([1, 256, 26, 26])
3 output shape: torch.Size([1, 256, 12, 12])
4 output shape: torch.Size([1, 384, 12, 12])
5 output shape: torch.Size([1, 384, 5, 5])
6 output shape: torch.Size([1, 384, 5, 5])
7 output shape: torch.Size([1, 10, 5, 5])
8 output shape: torch.Size([1, 10, 1, 1])
9 output shape: torch.Size([1, 10])
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
#train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.002, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
NiN重复使⽤由卷积层和代替全连接层的1×1卷积层构成的NiN块来构建深层⽹络。
NiN去除了容易造成过拟合的全连接输出层,而是将其替换成输出通道数等于标签类别数 的NiN块和全局平均池化层。
NiN的以上设计思想影响了后⾯⼀系列卷积神经⽹络的设计。
5.4 GoogLeNet
- 由Inception基础块组成。
- Inception块相当于⼀个有4条线路的⼦⽹络。它通过不同窗口形状的卷积层和最⼤池化层来并⾏抽取信息,并使⽤1×1卷积层减少通道数从而降低模型复杂度。
- 可以⾃定义的超参数是每个层的输出通道数,我们以此来控制模型复杂度。

class Inception(nn.Module):
# c1 - c4为每条线路里的层的输出通道数
def __init__(self, in_c, c1, c2, c3, c4):
super(Inception, self).__init__()
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2d(in_c, c1, kernel_size=1)
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2d(in_c, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2d(in_c, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_c, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
return torch.cat((p1, p2, p3, p4), dim=1) # 在通道维上连结输出
5.4.1 GoogLeNet模型
完整模型结构

b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
d2l.GlobalAvgPool2d())
net = nn.Sequential(b1, b2, b3, b4, b5,
d2l.FlattenLayer(), nn.Linear(1024, 10))
net = nn.Sequential(b1, b2, b3, b4, b5, d2l.FlattenLayer(), nn.Linear(1024, 10))
X = torch.rand(1, 1, 96, 96)
for blk in net.children():
X = blk(X)
print('output shape: ', X.shape)
#batchsize=128
batch_size = 16
# 如出现“out of memory”的报错信息,可减小batch_size或resize
#train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
6 机器翻译
机器翻译(MT):将一段文本从一种语言自动翻译为另一种语言,用神经网络解决这个问题通常称为神经机器翻译(NMT)。
主要特征:输出是单词序列而不是单个单词。 输出序列的长度可能与源序列的长度不同。
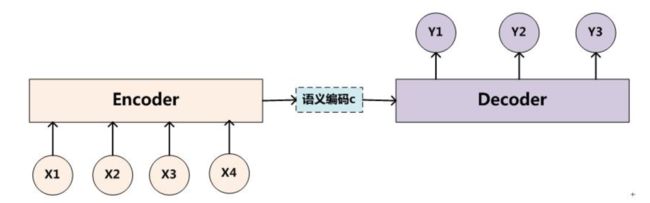
6.1 Encoder-Decoder
encoder:输入到隐藏状态
decoder:隐藏状态到输出
class Encoder(nn.Module):
def __init__(self, **kwargs):
super(Encoder, self).__init__(**kwargs)
def forward(self, X, *args):
raise NotImplementedError
class Decoder(nn.Module):
def __init__(self, **kwargs):
super(Decoder, self).__init__(**kwargs)
def init_state(self, enc_outputs, *args):
raise NotImplementedError
def forward(self, X, state):
raise NotImplementedError
class EncoderDecoder(nn.Module):
def __init__(self, encoder, decoder, **kwargs):
super(EncoderDecoder, self).__init__(**kwargs)
self.encoder = encoder
self.decoder = decoder
def forward(self, enc_X, dec_X, *args):
enc_outputs = self.encoder(enc_X, *args)
dec_state = self.decoder.init_state(enc_outputs, *args)
return self.decoder(dec_X, dec_state)
可以应用在对话系统、生成式任务中。
6.2 Sequence to Sequence模型
6.2.1模型:
训练
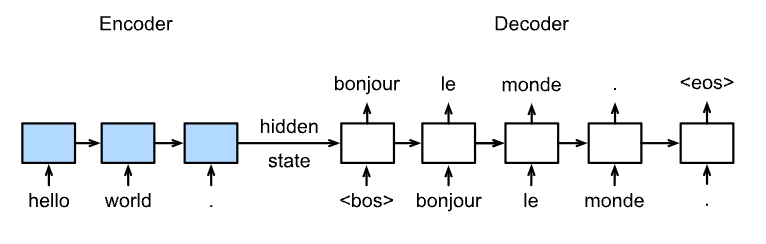
预测
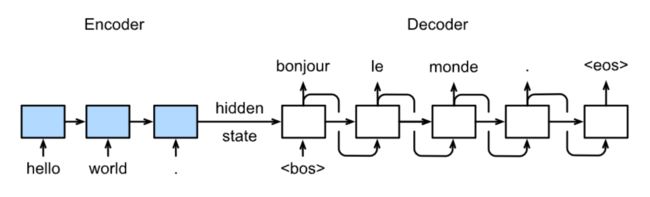
6.2.2 具体结构:
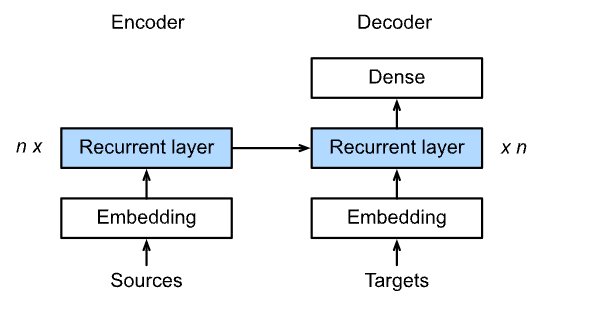
6.2.3 Encoder
class Seq2SeqEncoder(d2l.Encoder):
def __init__(self, vocab_size, embed_size, num_hiddens, num_layers,
dropout=0, **kwargs):
super(Seq2SeqEncoder, self).__init__(**kwargs)
self.num_hiddens=num_hiddens
self.num_layers=num_layers
self.embedding = nn.Embedding(vocab_size, embed_size)
self.rnn = nn.LSTM(embed_size,num_hiddens, num_layers, dropout=dropout)
def begin_state(self, batch_size, device):
return [torch.zeros(size=(self.num_layers, batch_size, self.num_hiddens), device=device),
torch.zeros(size=(self.num_layers, batch_size, self.num_hiddens), device=device)]
def forward(self, X, *args):
X = self.embedding(X) # X shape: (batch_size, seq_len, embed_size)
X = X.transpose(0, 1) # RNN needs first axes to be time
# state = self.begin_state(X.shape[1], device=X.device)
out, state = self.rnn(X)
# The shape of out is (seq_len, batch_size, num_hiddens).
# state contains the hidden state and the memory cell
# of the last time step, the shape is (num_layers, batch_size, num_hiddens)
return out, state
encoder = Seq2SeqEncoder(vocab_size=10, embed_size=8,num_hiddens=16, num_layers=2)
X = torch.zeros((4, 7),dtype=torch.long)
output, state = encoder(X)
output.shape, len(state), state[0].shape, state[1].shape
(torch.Size([7, 4, 16]), 2, torch.Size([2, 4, 16]), torch.Size([2, 4, 16]))
6.2.4 Decoder
class Seq2SeqDecoder(d2l.Decoder):
def __init__(self, vocab_size, embed_size, num_hiddens, num_layers,
dropout=0, **kwargs):
super(Seq2SeqDecoder, self).__init__(**kwargs)
self.embedding = nn.Embedding(vocab_size, embed_size)
self.rnn = nn.LSTM(embed_size,num_hiddens, num_layers, dropout=dropout)
self.dense = nn.Linear(num_hiddens,vocab_size)
def init_state(self, enc_outputs, *args):
return enc_outputs[1]
def forward(self, X, state):
X = self.embedding(X).transpose(0, 1)
out, state = self.rnn(X, state)
# Make the batch to be the first dimension to simplify loss computation.
out = self.dense(out).transpose(0, 1)
return out, state
decoder = Seq2SeqDecoder(vocab_size=10, embed_size=8,num_hiddens=16, num_layers=2)
state = decoder.init_state(encoder(X))
out, state = decoder(X, state)
out.shape, len(state), state[0].shape, state[1].shape
(torch.Size([4, 7, 10]), 2, torch.Size([2, 4, 16]), torch.Size([2, 4, 16]))
6.2.5 损失函数
def SequenceMask(X, X_len,value=0):
maxlen = X.size(1)
mask = torch.arange(maxlen)[None, :].to(X_len.device) < X_len[:, None]
X[~mask]=value
return X
X = torch.tensor([[1,2,3], [4,5,6]])
SequenceMask(X,torch.tensor([1,2]))
tensor([[1, 0, 0],
[4, 5, 0]])
X = torch.ones((2,3, 4))
SequenceMask(X, torch.tensor([1,2]),value=-1)
tensor([[[ 1., 1., 1., 1.],
[-1., -1., -1., -1.],
[-1., -1., -1., -1.]],
[[ 1., 1., 1., 1.],
[ 1., 1., 1., 1.],
[-1., -1., -1., -1.]]])
class MaskedSoftmaxCELoss(nn.CrossEntropyLoss):
# pred shape: (batch_size, seq_len, vocab_size)
# label shape: (batch_size, seq_len)
# valid_length shape: (batch_size, )
def forward(self, pred, label, valid_length):
# the sample weights shape should be (batch_size, seq_len)
weights = torch.ones_like(label)
weights = SequenceMask(weights, valid_length).float()
self.reduction='none'
output=super(MaskedSoftmaxCELoss, self).forward(pred.transpose(1,2), label)
return (output*weights).mean(dim=1)
loss = MaskedSoftmaxCELoss()
loss(torch.ones((3, 4, 10)), torch.ones((3,4),dtype=torch.long), torch.tensor([4,3,0]))
tensor([2.3026, 1.7269, 0.0000])
6.2.6 训练
def train_ch7(model, data_iter, lr, num_epochs, device): # Saved in d2l
model.to(device)
optimizer = optim.Adam(model.parameters(), lr=lr)
loss = MaskedSoftmaxCELoss()
tic = time.time()
for epoch in range(1, num_epochs+1):
l_sum, num_tokens_sum = 0.0, 0.0
for batch in data_iter:
optimizer.zero_grad()
X, X_vlen, Y, Y_vlen = [x.to(device) for x in batch]
Y_input, Y_label, Y_vlen = Y[:,:-1], Y[:,1:], Y_vlen-1
Y_hat, _ = model(X, Y_input, X_vlen, Y_vlen)
l = loss(Y_hat, Y_label, Y_vlen).sum()
l.backward()
with torch.no_grad():
d2l.grad_clipping_nn(model, 5, device)
num_tokens = Y_vlen.sum().item()
optimizer.step()
l_sum += l.sum().item()
num_tokens_sum += num_tokens
if epoch % 50 == 0:
print("epoch {0:4d},loss {1:.3f}, time {2:.1f} sec".format(
epoch, (l_sum/num_tokens_sum), time.time()-tic))
tic = time.time()
embed_size, num_hiddens, num_layers, dropout = 32, 32, 2, 0.0
batch_size, num_examples, max_len = 64, 1e3, 10
lr, num_epochs, ctx = 0.005, 300, d2l.try_gpu()
src_vocab, tgt_vocab, train_iter = d2l.load_data_nmt(
batch_size, max_len,num_examples)
encoder = Seq2SeqEncoder(
len(src_vocab), embed_size, num_hiddens, num_layers, dropout)
decoder = Seq2SeqDecoder(
len(tgt_vocab), embed_size, num_hiddens, num_layers, dropout)
model = d2l.EncoderDecoder(encoder, decoder)
train_ch7(model, train_iter, lr, num_epochs, ctx)
epoch 50,loss 0.093, time 38.2 sec
epoch 100,loss 0.046, time 37.9 sec
epoch 150,loss 0.032, time 36.8 sec
epoch 200,loss 0.027, time 37.5 sec
epoch 250,loss 0.026, time 37.8 sec
epoch 300,loss 0.025, time 37.3 sec
6.2.7 测试
def translate_ch7(model, src_sentence, src_vocab, tgt_vocab, max_len, device):
src_tokens = src_vocab[src_sentence.lower().split(' ')]
src_len = len(src_tokens)
if src_len < max_len:
src_tokens += [src_vocab.pad] * (max_len - src_len)
enc_X = torch.tensor(src_tokens, device=device)
enc_valid_length = torch.tensor([src_len], device=device)
# use expand_dim to add the batch_size dimension.
enc_outputs = model.encoder(enc_X.unsqueeze(dim=0), enc_valid_length)
dec_state = model.decoder.init_state(enc_outputs, enc_valid_length)
dec_X = torch.tensor([tgt_vocab.bos], device=device).unsqueeze(dim=0)
predict_tokens = []
for _ in range(max_len):
Y, dec_state = model.decoder(dec_X, dec_state)
# The token with highest score is used as the next time step input.
dec_X = Y.argmax(dim=2)
py = dec_X.squeeze(dim=0).int().item()
if py == tgt_vocab.eos:
break
predict_tokens.append(py)
return ' '.join(tgt_vocab.to_tokens(predict_tokens))
for sentence in ['Go .', 'Wow !', "I'm OK .", 'I won !']:
print(sentence + ' => ' + translate_ch7(
model, sentence, src_vocab, tgt_vocab, max_len, ctx))
Go . => va !
Wow ! => !
I'm OK . => ça va .
I won ! => j'ai gagné !
6.3 Beam Search
简单greedy search:

维特比算法:选择整体分数最高的句子(搜索空间太大)
集束搜索:

7 循环神经网络
7.1 GRU
RNN存在的问题:梯度较容易出现衰减或爆炸(BPTT)
⻔控循环神经⽹络:捕捉时间序列中时间步距离较⼤的依赖关系
RNN:

H t = ϕ ( X t W x h + H t − 1 W h h + b h ) H_{t} = ϕ(X_{t}W_{xh} + H_{t-1}W_{hh} + b_{h}) Ht=ϕ(XtWxh+Ht−1Whh+bh)
GRU:

R t = σ ( X t W x r + H t − 1 W h r + b r ) Z t = σ ( X t W x z + H t − 1 W h z + b z ) H ~ t = t a n h ( X t W x h + ( R t ⊙ H t − 1 ) W h h + b h ) H t = Z t ⊙ H t − 1 + ( 1 − Z t ) ⊙ H ~ t R_{t} = σ(X_tW_{xr} + H_{t−1}W_{hr} + b_r)\\ Z_{t} = σ(X_tW_{xz} + H_{t−1}W_{hz} + b_z)\\ \widetilde{H}_t = tanh(X_tW_{xh} + (R_t ⊙H_{t−1})W_{hh} + b_h)\\ H_t = Z_t⊙H_{t−1} + (1−Z_t)⊙\widetilde{H}_t Rt=σ(XtWxr+Ht−1Whr+br)Zt=σ(XtWxz+Ht−1Whz+bz)H t=tanh(XtWxh+(Rt⊙Ht−1)Whh+bh)Ht=Zt⊙Ht−1+(1−Zt)⊙H t
• 重置⻔有助于捕捉时间序列⾥短期的依赖关系;
• 更新⻔有助于捕捉时间序列⾥⻓期的依赖关系。
7.2 LSTM
**长短期记忆long short-term memory **:
遗忘门:控制上一时间步的记忆细胞
输入门:控制当前时间步的输入
输出门:控制从记忆细胞到隐藏状态
记忆细胞:⼀种特殊的隐藏状态的信息的流动

I t = σ ( X t W x i + H t − 1 W h i + b i ) F t = σ ( X t W x f + H t − 1 W h f + b f ) O t = σ ( X t W x o + H t − 1 W h o + b o ) C ~ t = t a n h ( X t W x c + H t − 1 W h c + b c ) C t = F t ⊙ C t − 1 + I t ⊙ C ~ t H t = O t ⊙ t a n h ( C t ) I_t = σ(X_tW_{xi} + H_{t−1}W_{hi} + b_i) \\ F_t = σ(X_tW_{xf} + H_{t−1}W_{hf} + b_f)\\ O_t = σ(X_tW_{xo} + H_{t−1}W_{ho} + b_o)\\ \widetilde{C}_t = tanh(X_tW_{xc} + H_{t−1}W_{hc} + b_c)\\ C_t = F_t ⊙C_{t−1} + I_t ⊙\widetilde{C}_t\\ H_t = O_t⊙tanh(C_t) It=σ(XtWxi+Ht−1Whi+bi)Ft=σ(XtWxf+Ht−1Whf+bf)Ot=σ(XtWxo+Ht−1Who+bo)C t=tanh(XtWxc+Ht−1Whc+bc)Ct=Ft⊙Ct−1+It⊙C tHt=Ot⊙tanh(Ct)
初始化参数
num_inputs, num_hiddens, num_outputs = vocab_size, 256, vocab_size
print('will use', device)
def get_params():
def _one(shape):
ts = torch.tensor(np.random.normal(0, 0.01, size=shape), device=device, dtype=torch.float32)
return torch.nn.Parameter(ts, requires_grad=True)
def _three():
return (_one((num_inputs, num_hiddens)),
_one((num_hiddens, num_hiddens)),
torch.nn.Parameter(torch.zeros(num_hiddens, device=device, dtype=torch.float32), requires_grad=True))
W_xi, W_hi, b_i = _three() # 输入门参数
W_xf, W_hf, b_f = _three() # 遗忘门参数
W_xo, W_ho, b_o = _three() # 输出门参数
W_xc, W_hc, b_c = _three() # 候选记忆细胞参数
# 输出层参数
W_hq = _one((num_hiddens, num_outputs))
b_q = torch.nn.Parameter(torch.zeros(num_outputs, device=device, dtype=torch.float32), requires_grad=True)
return nn.ParameterList([W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc, b_c, W_hq, b_q])
def init_lstm_state(batch_size, num_hiddens, device):
return (torch.zeros((batch_size, num_hiddens), device=device),
torch.zeros((batch_size, num_hiddens), device=device))
will use cpu
LSTM模型
def lstm(inputs, state, params):
[W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc, b_c, W_hq, b_q] = params
(H, C) = state
outputs = []
for X in inputs:
I = torch.sigmoid(torch.matmul(X, W_xi) + torch.matmul(H, W_hi) + b_i)
F = torch.sigmoid(torch.matmul(X, W_xf) + torch.matmul(H, W_hf) + b_f)
O = torch.sigmoid(torch.matmul(X, W_xo) + torch.matmul(H, W_ho) + b_o)
C_tilda = torch.tanh(torch.matmul(X, W_xc) + torch.matmul(H, W_hc) + b_c)
C = F * C + I * C_tilda
H = O * C.tanh()
Y = torch.matmul(H, W_hq) + b_q
outputs.append(Y)
return outputs, (H, C)
训练模型
num_epochs, num_steps, batch_size, lr, clipping_theta = 160, 35, 32, 1e2, 1e-2
pred_period, pred_len, prefixes = 40, 50, ['分开', '不分开']
d2l.train_and_predict_rnn(lstm, get_params, init_lstm_state, num_hiddens,
vocab_size, device, corpus_indices, idx_to_char,
char_to_idx, False, num_epochs, num_steps, lr,
clipping_theta, batch_size, pred_period, pred_len,
prefixes)
epoch 40, perplexity 211.457328, time 1.51 sec
- 分开 我不的我 我不的我 我不不 我不的我 我不不 我不的我 我不不 我不的我 我不不 我不的我 我不不
- 不分开 我不不 我不的我 我不不 我不的我 我不不 我不的我 我不不 我不的我 我不不 我不的我 我不不
epoch 80, perplexity 68.458662, time 1.50 sec
- 分开 我想你这你 我不要这你 我不要这你 我不要这你 我不要这你 我不要这你 我不要这你 我不要这你 我
- 不分开 我想你你的你 我想要你 我不要 我不要 我不要 我不要 我不要 我不要 我不要 我不要 我不要 我
epoch 120, perplexity 15.034657, time 1.49 sec
- 分开 我想你你的你笑 不知不觉 你你了一我不我 别发抖 快给我抬起起着你 别发抖 快给我抬起头 有你去对
- 不分开 我想你你 我不要再想我 不知不觉 你你了离不我 不知不觉 你跟了离不我 不知不觉 我该了这节活 后
epoch 160, perplexity 3.897414, time 1.49 sec
- 分开 我想带你里嵩山 学少林跟了了刚 我想就你了嵩着 我想去这生嵩 不天到双截棍 哼哼哈兮 快使用双截棍
- 不分开 我 我你你的微笑 像通 又又我 我想就这样牵着你的手不放 穿过来回单单 我 想和你样堡堡 我想
简洁实现
num_hiddens=256
num_epochs, num_steps, batch_size, lr, clipping_theta = 160, 35, 32, 1e2, 1e-2
pred_period, pred_len, prefixes = 40, 50, ['分开', '不分开']
lr = 1e-2 # 注意调整学习率
lstm_layer = nn.LSTM(input_size=vocab_size, hidden_size=num_hiddens)
model = d2l.RNNModel(lstm_layer, vocab_size)
d2l.train_and_predict_rnn_pytorch(model, num_hiddens, vocab_size, device,
corpus_indices, idx_to_char, char_to_idx,
num_epochs, num_steps, lr, clipping_theta,
batch_size, pred_period, pred_len, prefixes)
epoch 40, perplexity 1.019881, time 1.04 sec
- 分开始打呼 管家是一只会说法语举止优雅的猪 吸血前会念约翰福音做为弥补 拥有一双蓝色眼睛的凯萨琳公主 专
- 不分开的玩笑 想通 却又再考倒我 说散 你想很久了吧? 败给你的黑色幽默 不想太多 我想一定是我听错弄错搞
epoch 80, perplexity 1.013078, time 1.01 sec
- 分开的话像语言暴力 我已无能为力再提起 决定中断熟悉 然后在这里 不限日期 然后将过去 慢慢温习 让我爱
- 不分开的玩笑 想通 却又再考倒我 说散 你想很久了吧? 败给你的黑色幽默 说散 你想很久了吧? 我的认真败
epoch 120, perplexity 1.010264, time 1.01 sec
- 分开 我们儿子她人在江南等我 泪不休 语沉默 一壶好酒 再来一碗热粥 配上几斤的牛肉 我说店小二 三两银
- 不分开 我有你看棒球 想这样没担忧 唱着歌 一直走 我想就这样牵着你的手不放开 爱可不可以简简单单没有伤害
epoch 160, perplexity 1.008950, time 1.02 sec
- 分开 我才 原来我只想要你 陪我去吃汉堡 说穿了其实我的愿望就怎么小 就怎么每天祈祷我的心跳你知道
- 不分开 我才你看 我想要再这样打我妈妈 我说的话 你甘会听 不要再这样打我妈妈 难道你手不会痛吗 其实我回
7.3 深度循环神经网络
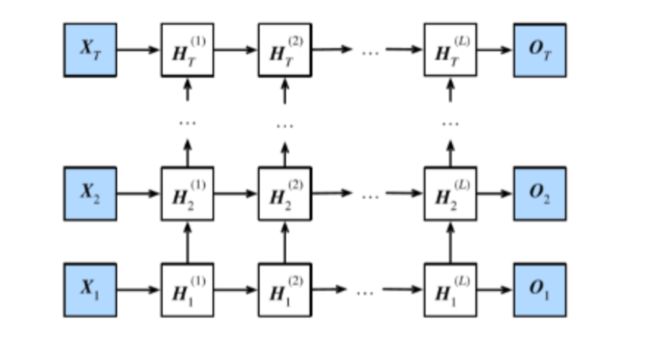
H t ( 1 ) = ϕ ( X t W x h ( 1 ) + H t − 1 ( 1 ) W h h ( 1 ) + b h ( 1 ) ) H t ( ℓ ) = ϕ ( H t ( ℓ − 1 ) W x h ( ℓ ) + H t − 1 ( ℓ ) W h h ( ℓ ) + b h ( ℓ ) ) O t = H t ( L ) W h q + b q \boldsymbol{H}_t^{(1)} = \phi(\boldsymbol{X}_t \boldsymbol{W}_{xh}^{(1)} + \boldsymbol{H}_{t-1}^{(1)} \boldsymbol{W}_{hh}^{(1)} + \boldsymbol{b}_h^{(1)})\\ \boldsymbol{H}_t^{(\ell)} = \phi(\boldsymbol{H}_t^{(\ell-1)} \boldsymbol{W}_{xh}^{(\ell)} + \boldsymbol{H}_{t-1}^{(\ell)} \boldsymbol{W}_{hh}^{(\ell)} + \boldsymbol{b}_h^{(\ell)})\\ \boldsymbol{O}_t = \boldsymbol{H}_t^{(L)} \boldsymbol{W}_{hq} + \boldsymbol{b}_q Ht(1)=ϕ(XtWxh(1)+Ht−1(1)Whh(1)+bh(1))Ht(ℓ)=ϕ(Ht(ℓ−1)Wxh(ℓ)+Ht−1(ℓ)Whh(ℓ)+bh(ℓ))Ot=Ht(L)Whq+bq
num_hiddens=256
num_epochs, num_steps, batch_size, lr, clipping_theta = 160, 35, 32, 1e2, 1e-2
pred_period, pred_len, prefixes = 40, 50, ['分开', '不分开']
lr = 1e-2 # 注意调整学习率
gru_layer = nn.LSTM(input_size=vocab_size, hidden_size=num_hiddens,num_layers=2)
model = d2l.RNNModel(gru_layer, vocab_size).to(device)
d2l.train_and_predict_rnn_pytorch(model, num_hiddens, vocab_size, device,
corpus_indices, idx_to_char, char_to_idx,
num_epochs, num_steps, lr, clipping_theta,
batch_size, pred_period, pred_len, prefixes)
epoch 40, perplexity 12.840496, time 1.52 sec
- 分开我 想你的话我在想再你的让我女疼 我想你 我有要有 想你你 想你的让我女沉 我想你你 想你的让我女沉
- 不分开的经爱女人 坏坏的让我疯狂的可爱女人 坏坏的让我疯狂的可爱女人 坏坏的让我疯狂的可爱女人 坏坏的让我
epoch 80, perplexity 1.247634, time 1.52 sec
- 分开有一条热昏头的响尾蛇 无力的躺在干枯的河 在等待雨季来临变沼泽 灰狼啃食著水鹿的骨头 秃鹰盘旋死盯着
- 不分开的会手 穿梭放受 一朵一朵因你而香 试图让夕阳飞翔 带领你我环绕大自然 迎著风 开始共渡每一天 手牵
epoch 120, perplexity 1.021974, time 1.56 sec
- 分开我妈妈 我有多重要 我后悔没让你知道 安静的听你撒娇 看你睡著一直到老 就是开不了口让她知道 就是那
- 不分开的会堡 想要将我不投 又不会掩护我 选你这种队友 瞎透了我 说你说 分数怎么停留 一直在停留 谁让
epoch 160, perplexity 1.016324, time 1.59 sec
- 分开在没有一个人身留 旧时光 一九四三 在回忆 的路上 时间变好慢 老街坊 小弄堂 是属于那年代白墙黑
- 不分开的我有 有样的要再这样打我妈妈 难道你手不会痛吗 不要再这样打我妈妈 难道你手不会痛吗 不要再这样打
gru_layer = nn.LSTM(input_size=vocab_size, hidden_size=num_hiddens,num_layers=6)
model = d2l.RNNModel(gru_layer, vocab_size).to(device)
d2l.train_and_predict_rnn_pytorch(model, num_hiddens, vocab_size, device,
corpus_indices, idx_to_char, char_to_idx,
num_epochs, num_steps, lr, clipping_theta,
batch_size, pred_period, pred_len, prefixes)
epoch 40, perplexity 276.815235, time 8.50 sec
- 分开
- 不分开
epoch 80, perplexity 276.278550, time 8.51 sec
- 分开
- 不分开
epoch 120, perplexity 276.146710, time 8.53 sec
- 分开
- 不分开
epoch 160, perplexity 275.739864, time 9.04 sec
- 分开
- 不分开
7.4 双向循环神经网络
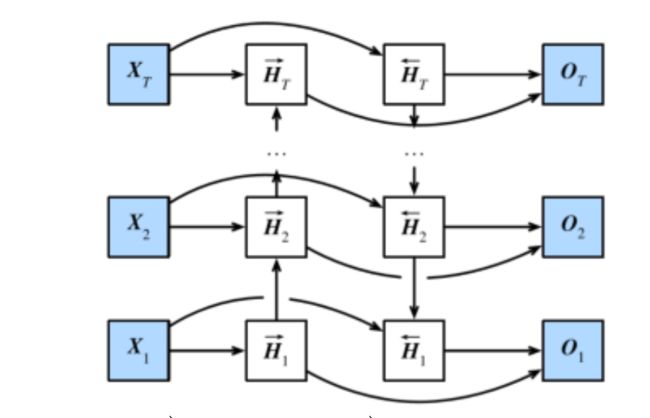
H → t = ϕ ( X t W x h ( f ) + H → t − 1 W h h ( f ) + b h ( f ) ) H ← t = ϕ ( X t W x h ( b ) + H ← t + 1 W h h ( b ) + b h ( b ) ) \begin{aligned} \overrightarrow{\boldsymbol{H}}_t &= \phi(\boldsymbol{X}_t \boldsymbol{W}_{xh}^{(f)} + \overrightarrow{\boldsymbol{H}}_{t-1} \boldsymbol{W}_{hh}^{(f)} + \boldsymbol{b}_h^{(f)})\\ \overleftarrow{\boldsymbol{H}}_t &= \phi(\boldsymbol{X}_t \boldsymbol{W}_{xh}^{(b)} + \overleftarrow{\boldsymbol{H}}_{t+1} \boldsymbol{W}_{hh}^{(b)} + \boldsymbol{b}_h^{(b)}) \end{aligned} HtHt=ϕ(XtWxh(f)+Ht−1Whh(f)+bh(f))=ϕ(XtWxh(b)+Ht+1Whh(b)+bh(b))
H t = ( H → t , H ← t ) \boldsymbol{H}_t=(\overrightarrow{\boldsymbol{H}}_{t}, \overleftarrow{\boldsymbol{H}}_t) Ht=(Ht,Ht)
O t = H t W h q + b q \boldsymbol{O}_t = \boldsymbol{H}_t \boldsymbol{W}_{hq} + \boldsymbol{b}_q Ot=HtWhq+bq
num_hiddens=128
num_epochs, num_steps, batch_size, lr, clipping_theta = 160, 35, 32, 1e-2, 1e-2
pred_period, pred_len, prefixes = 40, 50, ['分开', '不分开']
lr = 1e-2 # 注意调整学习率
gru_layer = nn.GRU(input_size=vocab_size, hidden_size=num_hiddens,bidirectional=True)
model = d2l.RNNModel(gru_layer, vocab_size).to(device)
d2l.train_and_predict_rnn_pytorch(model, num_hiddens, vocab_size, device,
corpus_indices, idx_to_char, char_to_idx,
num_epochs, num_steps, lr, clipping_theta,
batch_size, pred_period, pred_len, prefixes)
epoch 40, perplexity 1.001741, time 0.91 sec
- 分开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开
- 不分开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开
epoch 80, perplexity 1.000520, time 0.91 sec
- 分开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开
- 不分开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开
epoch 120, perplexity 1.000255, time 0.99 sec
- 分开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开
- 不分开球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我
epoch 160, perplexity 1.000151, time 0.92 sec
- 分开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开始开
- 不分开球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我球我
8 注意力机制
在“编码器—解码器(seq2seq)”⼀节⾥,解码器在各个时间步依赖相同的背景变量(context vector)来获取输⼊序列信息。当编码器为循环神经⽹络时,背景变量来⾃它最终时间步的隐藏状态。将源序列输入信息以循环单位状态编码,然后将其传递给解码器以生成目标序列。然而这种结构存在着问题,尤其是RNN机制实际中存在长程梯度消失的问题,对于较长的句子,我们很难寄希望于将输入的序列转化为定长的向量而保存所有的有效信息,所以随着所需翻译句子的长度的增加,这种结构的效果会显著下降。
与此同时,解码的目标词语可能只与原输入的部分词语有关,而并不是与所有的输入有关。例如,当把“Hello world”翻译成“Bonjour le monde”时,“Hello”映射成“Bonjour”,“world”映射成“monde”。在seq2seq模型中,解码器只能隐式地从编码器的最终状态中选择相应的信息。然而,注意力机制可以将这种选择过程显式地建模。

8.1 注意力机制框架
Attention 是一种通用的带权池化方法,输入由两部分构成:询问(query)和键值对(key-value pairs)。 k i ∈ R d k , v i ∈ R d v k_i∈ℝ^{d_k}, v_i∈ℝ^{d_v} ki∈Rdk,vi∈Rdv. Query q ∈ R d q q∈ℝ^{d_q} q∈Rdq , attention layer得到输出与value的维度一致 o ∈ R d v o∈ℝ^{d_v} o∈Rdv. 对于一个query来说,attention layer 会与每一个key计算注意力分数并进行权重的归一化,输出的向量 o o o则是value的加权求和,而每个key计算的权重与value一一对应。
为了计算输出,我们首先假设有一个函数 α \alpha α 用于计算query和key的相似性,然后可以计算所有的 attention scores a 1 , … , a n a_1, \ldots, a_n a1,…,an by
a i = α ( q , k i ) . a_i = \alpha(\mathbf q, \mathbf k_i). ai=α(q,ki).
我们使用 softmax函数 获得注意力权重:
b 1 , … , b n = softmax ( a 1 , … , a n ) . b_1, \ldots, b_n = \textrm{softmax}(a_1, \ldots, a_n). b1,…,bn=softmax(a1,…,an).
最终的输出就是value的加权求和:
o = ∑ i = 1 n b i v i . \mathbf o = \sum_{i=1}^n b_i \mathbf v_i. o=i=1∑nbivi.

不同的attetion layer的区别在于score函数的选择,在本节的其余部分,我们将讨论两个常用的注意层 Dot-product Attention 和 Multilayer Perceptron Attention;随后我们将实现一个引入attention的seq2seq模型并在英法翻译语料上进行训练与测试。
import math
import torch
import torch.nn as nn
import os
def file_name_walk(file_dir):
for root, dirs, files in os.walk(file_dir):
# print("root", root) # 当前目录路径
print("dirs", dirs) # 当前路径下所有子目录
print("files", files) # 当前路径下所有非目录子文件
file_name_walk("/home/kesci/input/fraeng6506")
dirs []
files ['_about.txt', 'fra.txt']
8.2Softmax屏蔽
在深入研究实现之前,我们首先介绍softmax操作符的一个屏蔽操作。
def SequenceMask(X, X_len,value=-1e6):
maxlen = X.size(1)
#print(X.size(),torch.arange((maxlen),dtype=torch.float)[None, :],'\n',X_len[:, None] )
mask = torch.arange((maxlen),dtype=torch.float)[None, :] >= X_len[:, None]
#print(mask)
X[mask]=value
return X
def masked_softmax(X, valid_length):
# X: 3-D tensor, valid_length: 1-D or 2-D tensor
softmax = nn.Softmax(dim=-1)
if valid_length is None:
return softmax(X)
else:
shape = X.shape
if valid_length.dim() == 1:
try:
valid_length = torch.FloatTensor(valid_length.numpy().repeat(shape[1], axis=0))#[2,2,3,3]
except:
valid_length = torch.FloatTensor(valid_length.cpu().numpy().repeat(shape[1], axis=0))#[2,2,3,3]
else:
valid_length = valid_length.reshape((-1,))
# fill masked elements with a large negative, whose exp is 0
X = SequenceMask(X.reshape((-1, shape[-1])), valid_length)
return softmax(X).reshape(shape)
masked_softmax(torch.rand((2,2,4),dtype=torch.float), torch.FloatTensor([2,3]))
tensor([[[0.5423, 0.4577, 0.0000, 0.0000],
[0.5290, 0.4710, 0.0000, 0.0000]],
[[0.2969, 0.2966, 0.4065, 0.0000],
[0.3607, 0.2203, 0.4190, 0.0000]]])
超出2维矩阵的乘法
X X X 和 Y Y Y 是维度分别为 ( b , n , m ) (b,n,m) (b,n,m) 和 ( b , m , k ) (b, m, k) (b,m,k)的张量,进行 b b b 次二维矩阵乘法后得到 Z Z Z, 维度为 ( b , n , k ) (b, n, k) (b,n,k)。
Z [ i , : , : ] = d o t ( X [ i , : , : ] , Y [ i , : , : ] ) f o r i = 1 , … , n . Z[i,:,:] = dot(X[i,:,:], Y[i,:,:])\qquad for\ i= 1,…,n\ . Z[i,:,:]=dot(X[i,:,:],Y[i,:,:])for i=1,…,n .
torch.bmm(torch.ones((2,1,3), dtype = torch.float), torch.ones((2,3,2), dtype = torch.float))
tensor([[[3., 3.]],
[[3., 3.]]])
8.3 点积注意力
The dot product 假设query和keys有相同的维度, 即 ∀ i , q , k i ∈ R d \forall i, q,k_i∈ ℝ_d ∀i,q,ki∈Rd. 通过计算query和key转置的乘积来计算attention score,通常还会除去 d \sqrt{d} d 减少计算出来的score对维度的依赖性,如下
α ( q , k ) = ⟨ q , k ⟩ / d \alpha(q,k)=⟨q,k⟩/ \sqrt{d} α(q,k)=⟨q,k⟩/d
假设 Q ∈ R m × d Q∈ℝ^{m×d} Q∈Rm×d 有 m m m 个query, K ∈ R n × d K∈ℝ^{n×d} K∈Rn×d 有 n n n 个keys. 我们可以通过矩阵运算的方式计算所有 m n mn mn 个score:
α ( Q , K ) = Q K T / d \alpha(Q,K)=QK^T/\sqrt{d} α(Q,K)=QKT/d
现在让我们实现这个层,它支持一批查询和键值对。此外,它支持作为正则化随机删除一些注意力权重.
# Save to the d2l package.
class DotProductAttention(nn.Module):
def __init__(self, dropout, **kwargs):
super(DotProductAttention, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
# query: (batch_size, #queries, d)
# key: (batch_size, #kv_pairs, d)
# value: (batch_size, #kv_pairs, dim_v)
# valid_length: either (batch_size, ) or (batch_size, xx)
def forward(self, query, key, value, valid_length=None):
d = query.shape[-1]
# set transpose_b=True to swap the last two dimensions of key
scores = torch.bmm(query, key.transpose(1,2)) / math.sqrt(d)
attention_weights = self.dropout(masked_softmax(scores, valid_length))
print("attention_weight\n",attention_weights)
return torch.bmm(attention_weights, value)
8. 3.1测试
现在我们创建了两个批,每个批有一个query和10个key-values对。我们通过valid_length指定,对于第一批,我们只关注前2个键-值对,而对于第二批,我们将检查前6个键-值对。因此,尽管这两个批处理具有相同的查询和键值对,但我们获得的输出是不同的。
atten = DotProductAttention(dropout=0)
keys = torch.ones((2,10,2),dtype=torch.float)
values = torch.arange((40), dtype=torch.float).view(1,10,4).repeat(2,1,1)
atten(torch.ones((2,1,2),dtype=torch.float), keys, values, torch.FloatTensor([2, 6]))
attention_weight
tensor([[[0.5000, 0.5000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000,
0.0000, 0.0000]],
[[0.1667, 0.1667, 0.1667, 0.1667, 0.1667, 0.1667, 0.0000, 0.0000,
0.0000, 0.0000]]])
tensor([[[ 2.0000, 3.0000, 4.0000, 5.0000]],
[[10.0000, 11.0000, 12.0000, 13.0000]]])
8.4 多层感知机注意力
在多层感知器中,我们首先将 query and keys 投影到 R h ℝ^ℎ Rh .为了更具体,我们将可以学习的参数做如下映射
W k ∈ R h × d k W_k∈ℝ^{h×d_k} Wk∈Rh×dk , W q ∈ R h × d q W_q∈ℝ^{ℎ×d_q} Wq∈Rh×dq , and v ∈ R h v∈ℝ^h v∈Rh . 将score函数定义
α ( k , q ) = v t a n h ( W k + W q ) \alpha(k,q)=v^tanh(W_k+W_q) α(k,q)=vtanh(Wk+Wq)
.
然后将key 和 value 在特征的维度上合并(concatenate),然后送至 a single hidden layer perceptron 这层中 hidden layer 为 ℎ and 输出的size为 1 .隐层激活函数为tanh,无偏置.
# Save to the d2l package.
class MLPAttention(nn.Module):
def __init__(self, units,ipt_dim,dropout, **kwargs):
super(MLPAttention, self).__init__(**kwargs)
# Use flatten=True to keep query's and key's 3-D shapes.
self.W_k = nn.Linear(ipt_dim, units, bias=False)
self.W_q = nn.Linear(ipt_dim, units, bias=False)
self.v = nn.Linear(units, 1, bias=False)
self.dropout = nn.Dropout(dropout)
def forward(self, query, key, value, valid_length):
query, key = self.W_k(query), self.W_q(key)
#print("size",query.size(),key.size())
# expand query to (batch_size, #querys, 1, units), and key to
# (batch_size, 1, #kv_pairs, units). Then plus them with broadcast.
features = query.unsqueeze(2) + key.unsqueeze(1)
#print("features:",features.size()) #--------------开启
scores = self.v(features).squeeze(-1)
attention_weights = self.dropout(masked_softmax(scores, valid_length))
return torch.bmm(attention_weights, value)
8.4.1 测试
尽管MLPAttention包含一个额外的MLP模型,但如果给定相同的输入和相同的键,我们将获得与DotProductAttention相同的输出
atten = MLPAttention(ipt_dim=2,units = 8, dropout=0)
atten(torch.ones((2,1,2), dtype = torch.float), keys, values, torch.FloatTensor([2, 6]))
tensor([[[ 2.0000, 3.0000, 4.0000, 5.0000]],
[[10.0000, 11.0000, 12.0000, 13.0000]]], grad_fn=)
- 注意力层显式地选择相关的信息。
- 注意层的内存由键-值对组成,因此它的输出接近于键类似于查询的值。
8.5 引入注意力机制的Seq2seq模型
将注意机制添加到sequence to sequence 模型中,以显式地使用权重聚合states。下图展示encoding 和decoding的模型结构,在时间步为t的时候。此刻attention layer保存着encodering看到的所有信息——即encoding的每一步输出。在decoding阶段,解码器的 t t t时刻的隐藏状态被当作query,encoder的每个时间步的hidden states作为key和value进行attention聚合. Attetion model的输出当作成上下文信息context vector,并与解码器输入 D t D_t Dt拼接起来一起送到解码器:

F i g 1 具 有 注 意 机 制 的 s e q − t o − s e q 模 型 解 码 的 第 二 步 Fig1具有注意机制的seq-to-seq模型解码的第二步 Fig1具有注意机制的seq−to−seq模型解码的第二步
下图展示了seq2seq机制的所以层的关系,下面展示了encoder和decoder的layer结构

F i g 2 具 有 注 意 机 制 的 s e q − t o − s e q 模 型 中 层 结 构 Fig2具有注意机制的seq-to-seq模型中层结构 Fig2具有注意机制的seq−to−seq模型中层结构
import sys
sys.path.append('/home/kesci/input/d2len9900')
import d2l
8.6 解码器
由于带有注意机制的seq2seq的编码器与之前章节中的Seq2SeqEncoder相同,所以在此处我们只关注解码器。我们添加了一个MLP注意层(MLPAttention),它的隐藏大小与解码器中的LSTM层相同。然后我们通过从编码器传递三个参数来初始化解码器的状态:
-
the encoder outputs of all timesteps:encoder输出的各个状态,被用于attetion layer的memory部分,有相同的key和values
-
the hidden state of the encoder’s final timestep:编码器最后一个时间步的隐藏状态,被用于初始化decoder 的hidden state
-
the encoder valid length: 编码器的有效长度,借此,注意层不会考虑编码器输出中的填充标记(Paddings)
在解码的每个时间步,我们使用解码器的最后一个RNN层的输出作为注意层的query。然后,将注意力模型的输出与输入嵌入向量连接起来,输入到RNN层。虽然RNN层隐藏状态也包含来自解码器的历史信息,但是attention model的输出显式地选择了enc_valid_len以内的编码器输出,这样attention机制就会尽可能排除其他不相关的信息。
class Seq2SeqAttentionDecoder(d2l.Decoder):
def __init__(self, vocab_size, embed_size, num_hiddens, num_layers,
dropout=0, **kwargs):
super(Seq2SeqAttentionDecoder, self).__init__(**kwargs)
self.attention_cell = MLPAttention(num_hiddens,num_hiddens, dropout)
self.embedding = nn.Embedding(vocab_size, embed_size)
self.rnn = nn.LSTM(embed_size+ num_hiddens,num_hiddens, num_layers, dropout=dropout)
self.dense = nn.Linear(num_hiddens,vocab_size)
def init_state(self, enc_outputs, enc_valid_len, *args):
outputs, hidden_state = enc_outputs
# print("first:",outputs.size(),hidden_state[0].size(),hidden_state[1].size())
# Transpose outputs to (batch_size, seq_len, hidden_size)
return (outputs.permute(1,0,-1), hidden_state, enc_valid_len)
#outputs.swapaxes(0, 1)
def forward(self, X, state):
enc_outputs, hidden_state, enc_valid_len = state
#("X.size",X.size())
X = self.embedding(X).transpose(0,1)
# print("Xembeding.size2",X.size())
outputs = []
for l, x in enumerate(X):
# print(f"\n{l}-th token")
# print("x.first.size()",x.size())
# query shape: (batch_size, 1, hidden_size)
# select hidden state of the last rnn layer as query
query = hidden_state[0][-1].unsqueeze(1) # np.expand_dims(hidden_state[0][-1], axis=1)
# context has same shape as query
# print("query enc_outputs, enc_outputs:\n",query.size(), enc_outputs.size(), enc_outputs.size())
context = self.attention_cell(query, enc_outputs, enc_outputs, enc_valid_len)
# Concatenate on the feature dimension
# print("context.size:",context.size())
x = torch.cat((context, x.unsqueeze(1)), dim=-1)
# Reshape x to (1, batch_size, embed_size+hidden_size)
# print("rnn",x.size(), len(hidden_state))
out, hidden_state = self.rnn(x.transpose(0,1), hidden_state)
outputs.append(out)
outputs = self.dense(torch.cat(outputs, dim=0))
return outputs.transpose(0, 1), [enc_outputs, hidden_state,
enc_valid_len]
现在我们可以用注意力模型来测试seq2seq。为了与上节中的模型保持一致,我们对vocab_size、embed_size、num_hiddens和num_layers使用相同的超参数。结果,我们得到了相同的解码器输出形状,但是状态结构改变了。
encoder = d2l.Seq2SeqEncoder(vocab_size=10, embed_size=8,
num_hiddens=16, num_layers=2)
# encoder.initialize()
decoder = Seq2SeqAttentionDecoder(vocab_size=10, embed_size=8,
num_hiddens=16, num_layers=2)
X = torch.zeros((4, 7),dtype=torch.long)
print("batch size=4\nseq_length=7\nhidden dim=16\nnum_layers=2\n")
print('encoder output size:', encoder(X)[0].size())
print('encoder hidden size:', encoder(X)[1][0].size())
print('encoder memory size:', encoder(X)[1][1].size())
state = decoder.init_state(encoder(X), None)
out, state = decoder(X, state)
out.shape, len(state), state[0].shape, len(state[1]), state[1][0].shape
batch size=4
seq_length=7
hidden dim=16
num_layers=2
encoder output size: torch.Size([7, 4, 16])
encoder hidden size: torch.Size([2, 4, 16])
encoder memory size: torch.Size([2, 4, 16])
(torch.Size([4, 7, 10]), 3, torch.Size([4, 7, 16]), 2, torch.Size([2, 4, 16]))
8.7 训练
通过应用相同的训练超参数和相同的训练损失来尝试一个简单的娱乐模型。从结果中我们可以看出,由于训练数据集中的序列相对较短,额外的注意层并没有带来显著的改进。由于编码器和解码器的注意层的计算开销,该模型比没有注意的seq2seq模型慢得多。
import zipfile
import torch
import requests
from io import BytesIO
from torch.utils import data
import sys
import collections
class Vocab(object): # This class is saved in d2l.
def __init__(self, tokens, min_freq=0, use_special_tokens=False):
# sort by frequency and token
counter = collections.Counter(tokens)
token_freqs = sorted(counter.items(), key=lambda x: x[0])
token_freqs.sort(key=lambda x: x[1], reverse=True)
if use_special_tokens:
# padding, begin of sentence, end of sentence, unknown
self.pad, self.bos, self.eos, self.unk = (0, 1, 2, 3)
tokens = ['', '', '', '']
else:
self.unk = 0
tokens = ['']
tokens += [token for token, freq in token_freqs if freq >= min_freq]
self.idx_to_token = []
self.token_to_idx = dict()
for token in tokens:
self.idx_to_token.append(token)
self.token_to_idx[token] = len(self.idx_to_token) - 1
def __len__(self):
return len(self.idx_to_token)
def __getitem__(self, tokens):
if not isinstance(tokens, (list, tuple)):
return self.token_to_idx.get(tokens, self.unk)
else:
return [self.__getitem__(token) for token in tokens]
def to_tokens(self, indices):
if not isinstance(indices, (list, tuple)):
return self.idx_to_token[indices]
else:
return [self.idx_to_token[index] for index in indices]
def load_data_nmt(batch_size, max_len, num_examples=1000):
"""Download an NMT dataset, return its vocabulary and data iterator."""
# Download and preprocess
def preprocess_raw(text):
text = text.replace('\u202f', ' ').replace('\xa0', ' ')
out = ''
for i, char in enumerate(text.lower()):
if char in (',', '!', '.') and text[i-1] != ' ':
out += ' '
out += char
return out
with open('/home/kesci/input/fraeng6506/fra.txt', 'r') as f:
raw_text = f.read()
text = preprocess_raw(raw_text)
# Tokenize
source, target = [], []
for i, line in enumerate(text.split('\n')):
if i >= num_examples:
break
parts = line.split('\t')
if len(parts) >= 2:
source.append(parts[0].split(' '))
target.append(parts[1].split(' '))
# Build vocab
def build_vocab(tokens):
tokens = [token for line in tokens for token in line]
return Vocab(tokens, min_freq=3, use_special_tokens=True)
src_vocab, tgt_vocab = build_vocab(source), build_vocab(target)
# Convert to index arrays
def pad(line, max_len, padding_token):
if len(line) > max_len:
return line[:max_len]
return line + [padding_token] * (max_len - len(line))
def build_array(lines, vocab, max_len, is_source):
lines = [vocab[line] for line in lines]
if not is_source:
lines = [[vocab.bos] + line + [vocab.eos] for line in lines]
array = torch.tensor([pad(line, max_len, vocab.pad) for line in lines])
valid_len = (array != vocab.pad).sum(1)
return array, valid_len
src_vocab, tgt_vocab = build_vocab(source), build_vocab(target)
src_array, src_valid_len = build_array(source, src_vocab, max_len, True)
tgt_array, tgt_valid_len = build_array(target, tgt_vocab, max_len, False)
train_data = data.TensorDataset(src_array, src_valid_len, tgt_array, tgt_valid_len)
train_iter = data.DataLoader(train_data, batch_size, shuffle=True)
return src_vocab, tgt_vocab, train_iter
embed_size, num_hiddens, num_layers, dropout = 32, 32, 2, 0.0
batch_size, num_steps = 64, 10
lr, num_epochs, ctx = 0.005, 500, d2l.try_gpu()
src_vocab, tgt_vocab, train_iter = load_data_nmt(batch_size, num_steps)
encoder = d2l.Seq2SeqEncoder(
len(src_vocab), embed_size, num_hiddens, num_layers, dropout)
decoder = Seq2SeqAttentionDecoder(
len(tgt_vocab), embed_size, num_hiddens, num_layers, dropout)
model = d2l.EncoderDecoder(encoder, decoder)
8.8 训练和预测
d2l.train_s2s_ch9(model, train_iter, lr, num_epochs, ctx)
epoch 50,loss 0.104, time 54.7 sec
epoch 100,loss 0.046, time 54.8 sec
epoch 150,loss 0.031, time 54.7 sec
epoch 200,loss 0.027, time 54.3 sec
epoch 250,loss 0.025, time 54.3 sec
epoch 300,loss 0.024, time 54.4 sec
epoch 350,loss 0.024, time 54.4 sec
epoch 400,loss 0.024, time 54.5 sec
epoch 450,loss 0.023, time 54.4 sec
epoch 500,loss 0.023, time 54.7 sec
for sentence in ['Go .', 'Good Night !', "I'm OK .", 'I won !']:
print(sentence + ' => ' + d2l.predict_s2s_ch9(
model, sentence, src_vocab, tgt_vocab, num_steps, ctx))
Go . => va !
Good Night ! => !
I'm OK . => ça va .
I won ! => j'ai gagné !
9 Transformer
- CNNs 易于并行化,却不适合捕捉变长序列内的依赖关系。
- RNNs 适合捕捉长距离变长序列的依赖,但是却难以实现并行化处理序列。
为了整合CNN和RNN的优势,[Vaswani et al., 2017] 创新性地使用注意力机制设计了Transformer模型。该模型利用attention机制实现了并行化捕捉序列依赖,并且同时处理序列的每个位置的tokens,上述优势使得Transformer模型在性能优异的同时大大减少了训练时间。
图9.1展示了Transformer模型的架构,与上节的seq2seq模型相似,Transformer同样基于编码器-解码器架构,其区别主要在于以下三点:
- Transformer blocks:将seq2seq模型重的循环网络替换为了Transformer Blocks,该模块包含一个多头注意力层(Multi-head Attention Layers)以及两个position-wise feed-forward networks(FFN)。对于解码器来说,另一个多头注意力层被用于接受编码器的隐藏状态。
- Add and norm:多头注意力层和前馈网络的输出被送到两个“add and norm”层进行处理,该层包含残差结构以及层归一化。
- Position encoding:由于自注意力层并没有区分元素的顺序,所以一个位置编码层被用于向序列元素里添加位置信息。

F i g . 9.1 T r a n s f o r m e r 架 构 . Fig.9.1\ Transformer 架构. Fig.9.1 Transformer架构.
在接下来的部分,我们将会带领大家实现Transformer里全新的子结构,并且构建一个神经机器翻译模型用以训练和测试。
import os
import math
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
import sys
sys.path.append('/home/kesci/input/d2len9900')
import d2l
以下是复制了上一小节中 masked softmax 实现,这里就不再赘述了。
def SequenceMask(X, X_len,value=-1e6):
maxlen = X.size(1)
X_len = X_len.to(X.device)
#print(X.size(),torch.arange((maxlen),dtype=torch.float)[None, :],'\n',X_len[:, None] )
mask = torch.arange((maxlen), dtype=torch.float, device=X.device)
mask = mask[None, :] < X_len[:, None]
#print(mask)
X[~mask]=value
return X
def masked_softmax(X, valid_length):
# X: 3-D tensor, valid_length: 1-D or 2-D tensor
softmax = nn.Softmax(dim=-1)
if valid_length is None:
return softmax(X)
else:
shape = X.shape
if valid_length.dim() == 1:
try:
valid_length = torch.FloatTensor(valid_length.numpy().repeat(shape[1], axis=0))#[2,2,3,3]
except:
valid_length = torch.FloatTensor(valid_length.cpu().numpy().repeat(shape[1], axis=0))#[2,2,3,3]
else:
valid_length = valid_length.reshape((-1,))
# fill masked elements with a large negative, whose exp is 0
X = SequenceMask(X.reshape((-1, shape[-1])), valid_length)
return softmax(X).reshape(shape)
# Save to the d2l package.
class DotProductAttention(nn.Module):
def __init__(self, dropout, **kwargs):
super(DotProductAttention, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
# query: (batch_size, #queries, d)
# key: (batch_size, #kv_pairs, d)
# value: (batch_size, #kv_pairs, dim_v)
# valid_length: either (batch_size, ) or (batch_size, xx)
def forward(self, query, key, value, valid_length=None):
d = query.shape[-1]
# set transpose_b=True to swap the last two dimensions of key
scores = torch.bmm(query, key.transpose(1,2)) / math.sqrt(d)
attention_weights = self.dropout(masked_softmax(scores, valid_length))
return torch.bmm(attention_weights, value)
9.1 多头注意力层
在我们讨论多头注意力层之前,先来迅速理解以下自注意力(self-attention)的结构。自注意力模型是一个正规的注意力模型,序列的每一个元素对应的key,value,query是完全一致的。如图9.2 自注意力输出了一个与输入长度相同的表征序列,与循环神经网络相比,自注意力对每个元素输出的计算是并行的,所以我们可以高效的实现这个模块。

F i g . 9.2 自 注 意 力 结 构 Fig.9.2\ 自注意力结构 Fig.9.2 自注意力结构
多头注意力层包含 h h h个并行的自注意力层,每一个这种层被成为一个head。对每个头来说,在进行注意力计算之前,我们会将query、key和value用三个现行层进行映射,这 h h h个注意力头的输出将会被拼接之后输入最后一个线性层进行整合。

F i g . 9.3 多 头 注 意 力 Fig.9.3\ 多头注意力 Fig.9.3 多头注意力
假设query,key和value的维度分别是 d q d_q dq、 d k d_k dk和 d v d_v dv。那么对于每一个头 i = 1 , … , h i=1,\ldots,h i=1,…,h,我们可以训练相应的模型权重 W q ( i ) ∈ R p q × d q W_q^{(i)} \in \mathbb{R}^{p_q\times d_q} Wq(i)∈Rpq×dq、 W k ( i ) ∈ R p k × d k W_k^{(i)} \in \mathbb{R}^{p_k\times d_k} Wk(i)∈Rpk×dk和 W v ( i ) ∈ R p v × d v W_v^{(i)} \in \mathbb{R}^{p_v\times d_v} Wv(i)∈Rpv×dv,以得到每个头的输出:
o ( i ) = a t t e n t i o n ( W q ( i ) q , W k ( i ) k , W v ( i ) v ) o^{(i)} = attention(W_q^{(i)}q, W_k^{(i)}k, W_v^{(i)}v) o(i)=attention(Wq(i)q,Wk(i)k,Wv(i)v)
这里的attention可以是任意的attention function,比如前一节介绍的dot-product attention以及MLP attention。之后我们将所有head对应的输出拼接起来,送入最后一个线性层进行整合,这个层的权重可以表示为 W o ∈ R d 0 × h p v W_o\in \mathbb{R}^{d_0 \times hp_v} Wo∈Rd0×hpv
o = W o [ o ( 1 ) , … , o ( h ) ] o = W_o[o^{(1)}, \ldots, o^{(h)}] o=Wo[o(1),…,o(h)]
接下来我们就可以来实现多头注意力了,假设我们有h个头,隐藏层权重 h i d d e n _ s i z e = p q = p k = p v hidden\_size = p_q = p_k = p_v hidden_size=pq=pk=pv 与query,key,value的维度一致。除此之外,因为多头注意力层保持输入与输出张量的维度不变,所以输出feature的维度也设置为 d 0 = h i d d e n _ s i z e d_0 = hidden\_size d0=hidden_size。
class MultiHeadAttention(nn.Module):
def __init__(self, input_size, hidden_size, num_heads, dropout, **kwargs):
super(MultiHeadAttention, self).__init__(**kwargs)
self.num_heads = num_heads
self.attention = DotProductAttention(dropout)
self.W_q = nn.Linear(input_size, hidden_size, bias=False)
self.W_k = nn.Linear(input_size, hidden_size, bias=False)
self.W_v = nn.Linear(input_size, hidden_size, bias=False)
self.W_o = nn.Linear(hidden_size, hidden_size, bias=False)
def forward(self, query, key, value, valid_length):
# query, key, and value shape: (batch_size, seq_len, dim),
# where seq_len is the length of input sequence
# valid_length shape is either (batch_size, )
# or (batch_size, seq_len).
# Project and transpose query, key, and value from
# (batch_size, seq_len, hidden_size * num_heads) to
# (batch_size * num_heads, seq_len, hidden_size).
query = transpose_qkv(self.W_q(query), self.num_heads)
key = transpose_qkv(self.W_k(key), self.num_heads)
value = transpose_qkv(self.W_v(value), self.num_heads)
if valid_length is not None:
# Copy valid_length by num_heads times
device = valid_length.device
valid_length = valid_length.cpu().numpy() if valid_length.is_cuda else valid_length.numpy()
if valid_length.ndim == 1:
valid_length = torch.FloatTensor(np.tile(valid_length, self.num_heads))
else:
valid_length = torch.FloatTensor(np.tile(valid_length, (self.num_heads,1)))
valid_length = valid_length.to(device)
output = self.attention(query, key, value, valid_length)
output_concat = transpose_output(output, self.num_heads)
return self.W_o(output_concat)
def transpose_qkv(X, num_heads):
# Original X shape: (batch_size, seq_len, hidden_size * num_heads),
# -1 means inferring its value, after first reshape, X shape:
# (batch_size, seq_len, num_heads, hidden_size)
X = X.view(X.shape[0], X.shape[1], num_heads, -1)
# After transpose, X shape: (batch_size, num_heads, seq_len, hidden_size)
X = X.transpose(2, 1).contiguous()
# Merge the first two dimensions. Use reverse=True to infer shape from
# right to left.
# output shape: (batch_size * num_heads, seq_len, hidden_size)
output = X.view(-1, X.shape[2], X.shape[3])
return output
# Saved in the d2l package for later use
def transpose_output(X, num_heads):
# A reversed version of transpose_qkv
X = X.view(-1, num_heads, X.shape[1], X.shape[2])
X = X.transpose(2, 1).contiguous()
return X.view(X.shape[0], X.shape[1], -1)
cell = MultiHeadAttention(5, 9, 3, 0.5)
X = torch.ones((2, 4, 5))
valid_length = torch.FloatTensor([2, 3])
cell(X, X, X, valid_length).shape
torch.Size([2, 4, 9])
9.2 基于位置的前馈网络
Transformer 模块另一个非常重要的部分就是基于位置的前馈网络(FFN),它接受一个形状为(batch_size,seq_length, feature_size)的三维张量。Position-wise FFN由两个全连接层组成,他们作用在最后一维上。因为序列的每个位置的状态都会被单独地更新,所以我们称他为position-wise,这等效于一个1x1的卷积。
下面我们来实现PositionWiseFFN:
# Save to the d2l package.
class PositionWiseFFN(nn.Module):
def __init__(self, input_size, ffn_hidden_size, hidden_size_out, **kwargs):
super(PositionWiseFFN, self).__init__(**kwargs)
self.ffn_1 = nn.Linear(input_size, ffn_hidden_size)
self.ffn_2 = nn.Linear(ffn_hidden_size, hidden_size_out)
def forward(self, X):
return self.ffn_2(F.relu(self.ffn_1(X)))
与多头注意力层相似,FFN层同样只会对最后一维的大小进行改变;除此之外,对于两个完全相同的输入,FFN层的输出也将相等。
ffn = PositionWiseFFN(4, 4, 8)
out = ffn(torch.ones((2,3,4)))
print(out, out.shape)
tensor([[[ 0.2040, -0.1118, -0.1163, 0.1494, 0.3978, -0.5561, 0.4662,
-0.6598],
[ 0.2040, -0.1118, -0.1163, 0.1494, 0.3978, -0.5561, 0.4662,
-0.6598],
[ 0.2040, -0.1118, -0.1163, 0.1494, 0.3978, -0.5561, 0.4662,
-0.6598]],
[[ 0.2040, -0.1118, -0.1163, 0.1494, 0.3978, -0.5561, 0.4662,
-0.6598],
[ 0.2040, -0.1118, -0.1163, 0.1494, 0.3978, -0.5561, 0.4662,
-0.6598],
[ 0.2040, -0.1118, -0.1163, 0.1494, 0.3978, -0.5561, 0.4662,
-0.6598]]], grad_fn=) torch.Size([2, 3, 8])
9.3 Add and Norm
除了上面两个模块之外,Transformer还有一个重要的相加归一化层,它可以平滑地整合输入和其他层的输出,因此我们在每个多头注意力层和FFN层后面都添加一个含残差连接的Layer Norm层。这里 Layer Norm 与Batch Norm很相似,唯一的区别在于Batch Norm是对于batch size这个维度进行计算均值和方差的,而Layer Norm则是对最后一维进行计算。层归一化可以防止层内的数值变化过大,从而有利于加快训练速度并且提高泛化性能。 (ref)
layernorm = nn.LayerNorm(normalized_shape=2, elementwise_affine=True)
batchnorm = nn.BatchNorm1d(num_features=2, affine=True)
X = torch.FloatTensor([[1,2], [3,4]])
print('layer norm:', layernorm(X))
print('batch norm:', batchnorm(X))
layer norm: tensor([[-1.0000, 1.0000],
[-1.0000, 1.0000]], grad_fn=)
batch norm: tensor([[-1.0000, -1.0000],
[ 1.0000, 1.0000]], grad_fn=)
# Save to the d2l package.
class AddNorm(nn.Module):
def __init__(self, hidden_size, dropout, **kwargs):
super(AddNorm, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
self.norm = nn.LayerNorm(hidden_size)
def forward(self, X, Y):
return self.norm(self.dropout(Y) + X)
由于残差连接,X和Y需要有相同的维度。
add_norm = AddNorm(4, 0.5)
add_norm(torch.ones((2,3,4)), torch.ones((2,3,4))).shape
torch.Size([2, 3, 4])
9.4 位置编码
与循环神经网络不同,无论是多头注意力网络还是前馈神经网络都是独立地对每个位置的元素进行更新,这种特性帮助我们实现了高效的并行,却丢失了重要的序列顺序的信息。为了更好的捕捉序列信息,Transformer模型引入了位置编码去保持输入序列元素的位置。
假设输入序列的嵌入表示 X ∈ R l × d X\in \mathbb{R}^{l\times d} X∈Rl×d, 序列长度为 l l l嵌入向量维度为 d d d,则其位置编码为 P ∈ R l × d P \in \mathbb{R}^{l\times d} P∈Rl×d ,输出的向量就是二者相加 X + P X + P X+P。
位置编码是一个二维的矩阵,i对应着序列中的顺序,j对应其embedding vector内部的维度索引。我们可以通过以下等式计算位置编码:
P i , 2 j = s i n ( i / 1000 0 2 j / d ) P_{i,2j} = sin(i/10000^{2j/d}) Pi,2j=sin(i/100002j/d)
P i , 2 j + 1 = c o s ( i / 1000 0 2 j / d ) P_{i,2j+1} = cos(i/10000^{2j/d}) Pi,2j+1=cos(i/100002j/d)
f o r i = 0 , … , l − 1 a n d j = 0 , … , ⌊ ( d − 1 ) / 2 ⌋ for\ i=0,\ldots, l-1\ and\ j=0,\ldots,\lfloor (d-1)/2 \rfloor for i=0,…,l−1 and j=0,…,⌊(d−1)/2⌋

F i g . 9.4 位 置 编 码 Fig. 9.4\ 位置编码 Fig.9.4 位置编码
class PositionalEncoding(nn.Module):
def __init__(self, embedding_size, dropout, max_len=1000):
super(PositionalEncoding, self).__init__()
self.dropout = nn.Dropout(dropout)
self.P = np.zeros((1, max_len, embedding_size))
X = np.arange(0, max_len).reshape(-1, 1) / np.power(
10000, np.arange(0, embedding_size, 2)/embedding_size)
self.P[:, :, 0::2] = np.sin(X)
self.P[:, :, 1::2] = np.cos(X)
self.P = torch.FloatTensor(self.P)
def forward(self, X):
if X.is_cuda and not self.P.is_cuda:
self.P = self.P.cuda()
X = X + self.P[:, :X.shape[1], :]
return self.dropout(X)
9.5 编码器
我们已经有了组成Transformer的各个模块,现在我们可以开始搭建了!编码器包含一个多头注意力层,一个position-wise FFN,和两个 Add and Norm层。对于attention模型以及FFN模型,我们的输出维度都是与embedding维度一致的,这也是由于残差连接天生的特性导致的,因为我们要将前一层的输出与原始输入相加并归一化。
class EncoderBlock(nn.Module):
def __init__(self, embedding_size, ffn_hidden_size, num_heads,
dropout, **kwargs):
super(EncoderBlock, self).__init__(**kwargs)
self.attention = MultiHeadAttention(embedding_size, embedding_size, num_heads, dropout)
self.addnorm_1 = AddNorm(embedding_size, dropout)
self.ffn = PositionWiseFFN(embedding_size, ffn_hidden_size, embedding_size)
self.addnorm_2 = AddNorm(embedding_size, dropout)
def forward(self, X, valid_length):
Y = self.addnorm_1(X, self.attention(X, X, X, valid_length))
return self.addnorm_2(Y, self.ffn(Y))
# batch_size = 2, seq_len = 100, embedding_size = 24
# ffn_hidden_size = 48, num_head = 8, dropout = 0.5
X = torch.ones((2, 100, 24))
encoder_blk = EncoderBlock(24, 48, 8, 0.5)
encoder_blk(X, valid_length).shape
torch.Size([2, 100, 24])
现在我们来实现整个Transformer 编码器模型,整个编码器由n个刚刚定义的Encoder Block堆叠而成,因为残差连接的缘故,中间状态的维度始终与嵌入向量的维度d一致;同时注意到我们把嵌入向量乘以 d \sqrt{d} d 以防止其值过小。
class TransformerEncoder(d2l.Encoder):
def __init__(self, vocab_size, embedding_size, ffn_hidden_size,
num_heads, num_layers, dropout, **kwargs):
super(TransformerEncoder, self).__init__(**kwargs)
self.embedding_size = embedding_size
self.embed = nn.Embedding(vocab_size, embedding_size)
self.pos_encoding = PositionalEncoding(embedding_size, dropout)
self.blks = nn.ModuleList()
for i in range(num_layers):
self.blks.append(
EncoderBlock(embedding_size, ffn_hidden_size,
num_heads, dropout))
def forward(self, X, valid_length, *args):
X = self.pos_encoding(self.embed(X) * math.sqrt(self.embedding_size))
for blk in self.blks:
X = blk(X, valid_length)
return X
# test encoder
encoder = TransformerEncoder(200, 24, 48, 8, 2, 0.5)
encoder(torch.ones((2, 100)).long(), valid_length).shape
torch.Size([2, 100, 24])
9.6 解码器
Transformer 模型的解码器与编码器结构类似,然而,除了之前介绍的几个模块之外,编码器部分有另一个子模块。该模块也是多头注意力层,接受编码器的输出作为key和value,decoder的状态作为query。与编码器部分相类似,解码器同样是使用了add and norm机制,用残差和层归一化将各个子层的输出相连。
仔细来讲,在第t个时间步,当前输入 x t x_t xt是query,那么self attention接受了第t步以及前t-1步的所有输入 x 1 , … , x t − 1 x_1,\ldots, x_{t-1} x1,…,xt−1。在训练时,由于第t位置的输入可以观测到全部的序列,这与预测阶段的情形项矛盾,所以我们要通过将第t个时间步所对应的可观测长度设置为t,以消除不需要看到的未来的信息。

class DecoderBlock(nn.Module):
def __init__(self, embedding_size, ffn_hidden_size, num_heads,dropout,i,**kwargs):
super(DecoderBlock, self).__init__(**kwargs)
self.i = i
self.attention_1 = MultiHeadAttention(embedding_size, embedding_size, num_heads, dropout)
self.addnorm_1 = AddNorm(embedding_size, dropout)
self.attention_2 = MultiHeadAttention(embedding_size, embedding_size, num_heads, dropout)
self.addnorm_2 = AddNorm(embedding_size, dropout)
self.ffn = PositionWiseFFN(embedding_size, ffn_hidden_size, embedding_size)
self.addnorm_3 = AddNorm(embedding_size, dropout)
def forward(self, X, state):
enc_outputs, enc_valid_length = state[0], state[1]
# state[2][self.i] stores all the previous t-1 query state of layer-i
# len(state[2]) = num_layers
# If training:
# state[2] is useless.
# If predicting:
# In the t-th timestep:
# state[2][self.i].shape = (batch_size, t-1, hidden_size)
# Demo:
# love dogs ! [EOS]
# | | | |
# Transformer
# Decoder
# | | | |
# I love dogs !
if state[2][self.i] is None:
key_values = X
else:
# shape of key_values = (batch_size, t, hidden_size)
key_values = torch.cat((state[2][self.i], X), dim=1)
state[2][self.i] = key_values
if self.training:
batch_size, seq_len, _ = X.shape
# Shape: (batch_size, seq_len), the values in the j-th column are j+1
valid_length = torch.FloatTensor(np.tile(np.arange(1, seq_len+1), (batch_size, 1)))
valid_length = valid_length.to(X.device)
else:
valid_length = None
X2 = self.attention_1(X, key_values, key_values, valid_length)
Y = self.addnorm_1(X, X2)
Y2 = self.attention_2(Y, enc_outputs, enc_outputs, enc_valid_length)
Z = self.addnorm_2(Y, Y2)
return self.addnorm_3(Z, self.ffn(Z)), state
decoder_blk = DecoderBlock(24, 48, 8, 0.5, 0)
X = torch.ones((2, 100, 24))
state = [encoder_blk(X, valid_length), valid_length, [None]]
decoder_blk(X, state)[0].shape
torch.Size([2, 100, 24])
对于Transformer解码器来说,构造方式与编码器一样,除了最后一层添加一个dense layer以获得输出的置信度分数。下面让我们来实现一下Transformer Decoder,除了常规的超参数例如vocab_size embedding_size 之外,解码器还需要编码器的输出 enc_outputs 和句子有效长度 enc_valid_length。
class TransformerDecoder(d2l.Decoder):
def __init__(self, vocab_size, embedding_size, ffn_hidden_size,
num_heads, num_layers, dropout, **kwargs):
super(TransformerDecoder, self).__init__(**kwargs)
self.embedding_size = embedding_size
self.num_layers = num_layers
self.embed = nn.Embedding(vocab_size, embedding_size)
self.pos_encoding = PositionalEncoding(embedding_size, dropout)
self.blks = nn.ModuleList()
for i in range(num_layers):
self.blks.append(
DecoderBlock(embedding_size, ffn_hidden_size, num_heads,
dropout, i))
self.dense = nn.Linear(embedding_size, vocab_size)
def init_state(self, enc_outputs, enc_valid_length, *args):
return [enc_outputs, enc_valid_length, [None]*self.num_layers]
def forward(self, X, state):
X = self.pos_encoding(self.embed(X) * math.sqrt(self.embedding_size))
for blk in self.blks:
X, state = blk(X, state)
return self.dense(X), state
9.7 训练
import zipfile
import torch
import requests
from io import BytesIO
from torch.utils import data
import sys
import collections
class Vocab(object): # This class is saved in d2l.
def __init__(self, tokens, min_freq=0, use_special_tokens=False):
# sort by frequency and token
counter = collections.Counter(tokens)
token_freqs = sorted(counter.items(), key=lambda x: x[0])
token_freqs.sort(key=lambda x: x[1], reverse=True)
if use_special_tokens:
# padding, begin of sentence, end of sentence, unknown
self.pad, self.bos, self.eos, self.unk = (0, 1, 2, 3)
tokens = ['', '', '', '']
else:
self.unk = 0
tokens = ['']
tokens += [token for token, freq in token_freqs if freq >= min_freq]
self.idx_to_token = []
self.token_to_idx = dict()
for token in tokens:
self.idx_to_token.append(token)
self.token_to_idx[token] = len(self.idx_to_token) - 1
def __len__(self):
return len(self.idx_to_token)
def __getitem__(self, tokens):
if not isinstance(tokens, (list, tuple)):
return self.token_to_idx.get(tokens, self.unk)
else:
return [self.__getitem__(token) for token in tokens]
def to_tokens(self, indices):
if not isinstance(indices, (list, tuple)):
return self.idx_to_token[indices]
else:
return [self.idx_to_token[index] for index in indices]
def load_data_nmt(batch_size, max_len, num_examples=1000):
"""Download an NMT dataset, return its vocabulary and data iterator."""
# Download and preprocess
def preprocess_raw(text):
text = text.replace('\u202f', ' ').replace('\xa0', ' ')
out = ''
for i, char in enumerate(text.lower()):
if char in (',', '!', '.') and text[i-1] != ' ':
out += ' '
out += char
return out
with open('/home/kesci/input/fraeng6506/fra.txt', 'r') as f:
raw_text = f.read()
text = preprocess_raw(raw_text)
# Tokenize
source, target = [], []
for i, line in enumerate(text.split('\n')):
if i >= num_examples:
break
parts = line.split('\t')
if len(parts) >= 2:
source.append(parts[0].split(' '))
target.append(parts[1].split(' '))
# Build vocab
def build_vocab(tokens):
tokens = [token for line in tokens for token in line]
return Vocab(tokens, min_freq=3, use_special_tokens=True)
src_vocab, tgt_vocab = build_vocab(source), build_vocab(target)
# Convert to index arrays
def pad(line, max_len, padding_token):
if len(line) > max_len:
return line[:max_len]
return line + [padding_token] * (max_len - len(line))
def build_array(lines, vocab, max_len, is_source):
lines = [vocab[line] for line in lines]
if not is_source:
lines = [[vocab.bos] + line + [vocab.eos] for line in lines]
array = torch.tensor([pad(line, max_len, vocab.pad) for line in lines])
valid_len = (array != vocab.pad).sum(1)
return array, valid_len
src_vocab, tgt_vocab = build_vocab(source), build_vocab(target)
src_array, src_valid_len = build_array(source, src_vocab, max_len, True)
tgt_array, tgt_valid_len = build_array(target, tgt_vocab, max_len, False)
train_data = data.TensorDataset(src_array, src_valid_len, tgt_array, tgt_valid_len)
train_iter = data.DataLoader(train_data, batch_size, shuffle=True)
return src_vocab, tgt_vocab, train_iter
import os
import d2l
# 平台暂时不支持gpu,现在会自动使用cpu训练,gpu可以用了之后会使用gpu来训练
os.environ["CUDA_VISIBLE_DEVICES"] = "1"
embed_size, embedding_size, num_layers, dropout = 32, 32, 2, 0.05
batch_size, num_steps = 64, 10
lr, num_epochs, ctx = 0.005, 250, d2l.try_gpu()
print(ctx)
num_hiddens, num_heads = 64, 4
src_vocab, tgt_vocab, train_iter = load_data_nmt(batch_size, num_steps)
encoder = TransformerEncoder(
len(src_vocab), embedding_size, num_hiddens, num_heads, num_layers,
dropout)
decoder = TransformerDecoder(
len(src_vocab), embedding_size, num_hiddens, num_heads, num_layers,
dropout)
model = d2l.EncoderDecoder(encoder, decoder)
d2l.train_s2s_ch9(model, train_iter, lr, num_epochs, ctx)
cpu
epoch 50,loss 0.048, time 53.3 sec
epoch 100,loss 0.040, time 53.4 sec
epoch 150,loss 0.037, time 53.5 sec
epoch 200,loss 0.036, time 53.6 sec
epoch 250,loss 0.035, time 53.5 sec
model.eval()
for sentence in ['Go .', 'Wow !', "I'm OK .", 'I won !']:
print(sentence + ' => ' + d2l.predict_s2s_ch9(
model, sentence, src_vocab, tgt_vocab, num_steps, ctx))
Go . => !
Wow ! => !
I'm OK . => ça va .
I won ! => j'ai gagné !