opencv实战从0到N (2)—— 边缘检测
边缘检测
1,Sobel 算子是一个离散微分算子 (discrete differentiation operator)。 它用来计算图像灰度函数的近似梯度。
Sobel 算子结合了高斯平滑和微分求导。图像在边缘变化明显,所以用一阶微分求极值就可以得到边缘。
2,Laplacian算子使用二阶导数可以用来 检测边缘 。图像在边缘时,一阶导数是极值,而二阶导数过零点。
因为图像是 “2维”, 我们需要在两个方向求导。使用Laplacian算子将会使求导过程变得简单。
3,canny算子 是 John F. Canny 于 1986年开发出来的一个多级边缘检测算法,也被很多人认为是边缘检测的 最优算法,
最优边缘检测的三个主要评价标准是:
低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
最小响应: 图像中的边缘只能标识一次。
*滞后阈值: 最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
如果某一像素位置的幅值超过 高 阈值, 该像素被保留为边缘像素。
如果某一像素位置的幅值小于 低 阈值, 该像素被排除。
如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高 阈值的像素时被保留。
*Canny 推荐的 高:低 阈值比在 2:1 到3:1之间。
4,源码:
Mat edge_sobel(Mat src)
{
Mat dst, src_gray;
GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT);
/// 转换为灰度图
if (src.channels() > 1)
{
cvtColor(src, src_gray, CV_RGB2GRAY);
}
else
{
src_gray = src.clone();
}
Mat grad;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
/// 创建 grad_x 和 grad_y 矩阵
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
/// 求 X方向梯度
Sobel(src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
/// 求Y方向梯度
Sobel(src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_y, abs_grad_y);
/// 合并梯度(近似)
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
//imshow("x", abs_grad_x);
//imshow("y", abs_grad_y);
imshow("Sobel", grad);
return grad;
}
Mat edge_laplacian(Mat src)
{
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
Mat src_gray;
if (src.channels() > 1)
{
cvtColor(src, src_gray, CV_RGB2GRAY);
}
else
{
src_gray = src.clone();
}
Mat edge;
GaussianBlur(src_gray, src_gray, Size(3, 3), 0, 0, BORDER_DEFAULT);
Laplacian(src_gray, edge, ddepth, 3, scale, delta, BORDER_DEFAULT);
convertScaleAbs(edge, edge);
imshow("Laplacian", edge);
return edge;
}
Mat edge_canny(Mat src,double th1,double th2)
{
Mat edge;
GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT);
Canny(src, edge, th1, th2);
imshow("Canny", edge);
return edge;
}
int main(int argc, char** argv)
{
Mat img = imread("2.jpg", IMREAD_COLOR);
imshow("img", img);
edge_sobel(img);
edge_laplacian(img);
edge_canny(img,20,60);
waitKey(0);
}
5,运行结果
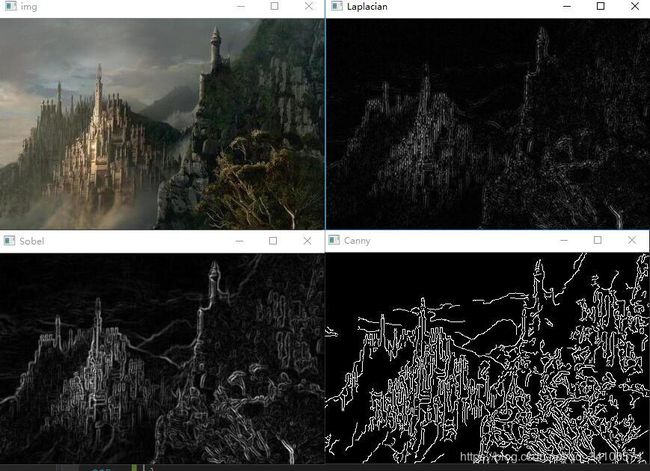
更多内容关注微信公众号:ML_Study