图像处理基础--图像缩放(原理、C++代码)
1、最近邻插值(最最基础的方法了)
举个栗子:
假设我们有一张原始图(源图,source),大小为3*3。
| 225 | 46 | 77 |
| 56 | 88 | 77 |
| 45 | 125 | 35 |
想要放大为4*4的目标图(destination)。
| ? | ? | ? | ? |
| ? | ? | ? | ? |
| ? | ? | ? | ? |
| ? | ? | ? | ? |
接着就该考虑怎么由源图填充目标图的像素了。
以左上角(0,0)为例,由公式
![]()
![]()
得到应该由源图中的(0,0)点像素值进行填充。以此类推目标图片中(1,0)点由源图中(1*(3/4),0*(3/4))=>(0.75,0)=>(1,0)填充(四舍五入),其它点类推可得到放大的图。
这种放大图像的方法会引起严重的失真,根源在于当坐标是浮点数时直接四舍五入取最近的整数。
代码:
# include
# include
using namespace std;
using namespace cv;
Mat NearInter(Mat &srcImage, double kx, double ky)
{
int rows = cvRound(srcImage.rows*kx);
int cols = cvRound(srcImage.cols*ky);
Mat resultImg(rows, cols, srcImage.type());
int i, j, x, y;
for (i = 0; i < rows; i++)
{
x = static_cast((i + 1) / kx + 0.5) - 1;
for (j = 0; j < cols; j++)
{
y = static_cast((j + 1) / ky + 0.5) - 1;
resultImg.at(i, j) = srcImage.at(x, y);
}
}
return resultImg;
}
int main()
{
Mat srcImg = imread("文件路径");
Mat resultImg = NearInter(srcImg, 0.6, 1.2);
imshow("src", srcImg);
imshow("0.6,1.2", resultImg);
waitKey(0);
return 0;
}
2、 双线性插值
在最近邻插值时,对于源图中坐标为浮点数的点,直接四舍五入取整带来了严重的失真。比如0.75直接取1,更科学的方法是,0.75距离1为0.25,距离0为0.75,按照距离的占比取相应点像素值的找比。
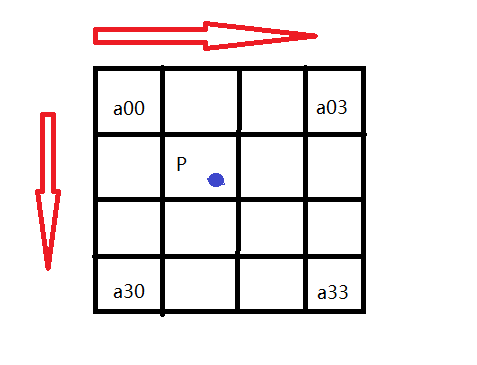
对于目标图通过反向变换得到的源图中浮点坐标为(i+u,j+v)(其中i,j为浮点数的整数部分,u,v为浮点数的小数部分);
这个点的像素值f(i+u,j+v)=(1-u)(1-v)f(i,j)+(1-u)vf(i,j+1)+u(1-v)f(i+1,j)+uvf(i+1,j+1),临近四个点按照横纵轴离(i+u,j+v)的距离的占比得到需要点的像素值。

则点P处像素值:


代码:
# include
# include
using namespace cv;
Mat LinerInter(Mat &srcImage, double kx, double ky);
int main()
{
Mat srcImg = imread("图片路径");
Mat resultImg = LinerInter(srcImg, 0.6, 1.2);
imshow("src", srcImg);
imshow("0.6, 1.2", resultImg);
waitKey(0);
return 0;
}
Mat LinerInter(Mat &srcImage, double kx, double ky)
{
int rows = cvRound(srcImage.rows*kx);
int cols = cvRound(srcImage.cols*ky);
Mat resultImg(rows, cols, srcImage.type());
int i, j;
int xi;
int yi;
int x11;
int y11;
double xm;
double ym;
double dx;
double dy;
for (i = 0; i < rows; i++)
{
xm = i / kx;
xi = (int)xm;
x11 = xi + 1;
dx = xm - xi;
for (j = 0; j < cols; j++)
{
ym = j / ky;
yi = (int)ym;
y11 = yi + 1;
dy = ym - yi;
//判断边界
if (x11 >(srcImage.rows - 1))
{
x11 = xi - 1;
}
if (y11 > (srcImage.cols - 1))
{
y11 = yi - 1;
}
//bgr
resultImg.at(i, j)[0] = (int)(srcImage.at(xi, yi)[0] * (1 - dx)*(1 - dy)
+ srcImage.at(x11, yi)[0] * dx*(1 - dy)
+ srcImage.at(xi, y11)[0] * (1 - dx)*dy
+ srcImage.at(x11, y11)[0] * dx*dy);
resultImg.at(i, j)[1] = (int)(srcImage.at(xi, yi)[1] * (1 - dx)*(1 - dy)
+ srcImage.at(x11, yi)[1] * dx*(1 - dy)
+ srcImage.at(xi, y11)[1] * (1 - dx)*dy
+ srcImage.at(x11, y11)[1] * dx*dy);
resultImg.at(i, j)[2] = (int)(srcImage.at(xi, yi)[2] * (1 - dx)*(1 - dy)
+ srcImage.at(x11, yi)[2] * dx*(1 - dy)
+ srcImage.at(xi, y11)[2] * (1 - dx)*dy
+ srcImage.at(x11, y11)[2] * dx*dy);
}
}
return resultImg;
}
3、双三次插值
思想同二次插值一样,不过是使用了周围的16个点的像素值。
双三次插值又称立方卷积插值。三次卷积插值是一种更加复杂的插值方式。该算法利用待采样点周围16个点的灰度值作三次插值,不仅考虑到4 个直接相邻点的灰度影响,而且考虑到各邻点间灰度值变化率的影响。三次运算可以得到更接近高分辨率图像的放大效果,但也导致了运算量的急剧增加。这种算法需要选取插值基函数来拟合数据,其最常用的插值基函数(BiCubic基函数)如图1所示.
构造BiCubic函数:(其中a=-0.5)
对待插值的像素点(x,y)(x和y可以为浮点数),取其附近的4x4邻域点(xi,yj), i,j = 0,1,2,3。按如下公式进行插值计算:

代码:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include
#include
#include
using namespace cv;
using namespace std;
#define PI 3.14159265
float BiCubicPoly(float x);
void MyScaleBiCubicInter(Mat& src, Mat& dst, float TransMat[3][3]);
/**
* @function main
*/
int main( int argc, char** argv )
{
// load image
char* imageName = "images/Lenna_256.png";
Mat image;
image = imread(imageName,1);
if(!image.data)
{
cout << "No image data" << endl;
return -1;
}
// show image
namedWindow("image", CV_WINDOW_AUTOSIZE);
imshow("image", image);
Mat dst;
float transMat[3][3] = { {2.0, 0, 0}, {0, 2.0, 0}, {0, 0, 1} };
MyScaleBiCubicInter(image, dst, transMat);
namedWindow("out_image", CV_WINDOW_AUTOSIZE);
imshow("out_image", dst);
imwrite("Lenna_scale_biCubic2.jpg", dst);
waitKey(0);
return 0;
}
float BiCubicPoly(float x)
{
float abs_x = abs(x);
float a = -0.5;
if( abs_x <= 1.0 )
{
return (a+2)*pow(abs_x,3) - (a+3)*pow(abs_x,2) + 1;
}
else if( abs_x < 2.0 )
{
return a*pow(abs_x,3) - 5*a*pow(abs_x,2) + 8*a*abs_x - 4*a;
}
else
return 0.0;
}
void MyScaleBiCubicInter(Mat& src, Mat& dst, float TransMat[3][3])
{
CV_Assert(src.data);
CV_Assert(src.depth() != sizeof(uchar));
// calculate margin point of dst image
float left = 0;
float right = 0;
float top = 0;
float down = 0;
float x = src.cols * 1.0f;
float y = 0.0f;
float u1 = x * TransMat[0][0] + y * TransMat[0][1];
float v1 = x * TransMat[1][0] + y * TransMat[1][1];
x = src.cols * 1.0f;
y = src.rows * 1.0f;
float u2 = x * TransMat[0][0] + y * TransMat[0][1];
float v2 = x * TransMat[1][0] + y * TransMat[1][1];
x = 0.0f;
y = src.rows * 1.0f;
float u3 = x * TransMat[0][0] + y * TransMat[0][1];
float v3 = x * TransMat[1][0] + y * TransMat[1][1];
left = min( min( min(0.0f,u1), u2 ), u3);
right = max( max( max(0.0f,u1), u2 ), u3);
top = min( min( min(0.0f,v1), v2 ), v3);
down = max( max( max(0.0f,v1), v2 ), v3);
// create dst image
dst.create(int(abs(right-left)), int(abs(down-top)), src.type());
CV_Assert( dst.channels() == src.channels() );
int channels = dst.channels();
int i,j;
uchar* p;
uchar* q0;
uchar* q1;
uchar* q2;
uchar* q3;
for( i = 0; i < dst.rows; ++i)
{
p = dst.ptr(i);
for ( j = 0; j < dst.cols; ++j)
{
//
x = (j+left)/TransMat[0][0] ;
y = (i+top)/TransMat[1][1] ;
int x0 = int(x) - 1;
int y0 = int(y) - 1;
int x1 = int(x);
int y1 = int(y);
int x2 = int(x) + 1;
int y2 = int(y) + 1;
int x3 = int(x) + 2;
int y3 = int(y) + 2;
if( (x0 >= 0) && (x3 < src.cols) && (y0 >= 0) && (y3 < src.rows) )
{
q0 = src.ptr(y0);
q1 = src.ptr(y1);
q2 = src.ptr(y2);
q3 = src.ptr(y3);
float dist_x0 = BiCubicPoly(x-x0);
float dist_x1 = BiCubicPoly(x-x1);
float dist_x2 = BiCubicPoly(x-x2);
float dist_x3 = BiCubicPoly(x-x3);
float dist_y0 = BiCubicPoly(y-y0);
float dist_y1 = BiCubicPoly(y-y1);
float dist_y2 = BiCubicPoly(y-y2);
float dist_y3 = BiCubicPoly(y-y3);
float dist_x0y0 = dist_x0 * dist_y0;
float dist_x0y1 = dist_x0 * dist_y1;
float dist_x0y2 = dist_x0 * dist_y2;
float dist_x0y3 = dist_x0 * dist_y3;
float dist_x1y0 = dist_x1 * dist_y0;
float dist_x1y1 = dist_x1 * dist_y1;
float dist_x1y2 = dist_x1 * dist_y2;
float dist_x1y3 = dist_x1 * dist_y3;
float dist_x2y0 = dist_x2 * dist_y0;
float dist_x2y1 = dist_x2 * dist_y1;
float dist_x2y2 = dist_x2 * dist_y2;
float dist_x2y3 = dist_x2 * dist_y3;
float dist_x3y0 = dist_x3 * dist_y0;
float dist_x3y1 = dist_x3 * dist_y1;
float dist_x3y2 = dist_x3 * dist_y2;
float dist_x3y3 = dist_x3 * dist_y3;
switch(channels)
{
case 1:
{
break;
}
case 3:
{
p[3*j] = (uchar)(q0[3*x0] * dist_x0y0 +
q1[3*x0] * dist_x0y1 +
q2[3*x0] * dist_x0y2 +
q3[3*x0] * dist_x0y3 +
q0[3*x1] * dist_x1y0 +
q1[3*x1] * dist_x1y1 +
q2[3*x1] * dist_x1y2 +
q3[3*x1] * dist_x1y3 +
q0[3*x2] * dist_x2y0 +
q1[3*x2] * dist_x2y1 +
q2[3*x2] * dist_x2y2 +
q3[3*x2] * dist_x2y3 +
q0[3*x3] * dist_x3y0 +
q1[3*x3] * dist_x3y1 +
q2[3*x3] * dist_x3y2 +
q3[3*x3] * dist_x3y3 ) ;
p[3*j+1] = (uchar)(q0[3*x0+1] * dist_x0y0 +
q1[3*x0+1] * dist_x0y1 +
q2[3*x0+1] * dist_x0y2 +
q3[3*x0+1] * dist_x0y3 +
q0[3*x1+1] * dist_x1y0 +
q1[3*x1+1] * dist_x1y1 +
q2[3*x1+1] * dist_x1y2 +
q3[3*x1+1] * dist_x1y3 +
q0[3*x2+1] * dist_x2y0 +
q1[3*x2+1] * dist_x2y1 +
q2[3*x2+1] * dist_x2y2 +
q3[3*x2+1] * dist_x2y3 +
q0[3*x3+1] * dist_x3y0 +
q1[3*x3+1] * dist_x3y1 +
q2[3*x3+1] * dist_x3y2 +
q3[3*x3+1] * dist_x3y3 ) ;
p[3*j+2] = (uchar)(q0[3*x0+2] * dist_x0y0 +
q1[3*x0+2] * dist_x0y1 +
q2[3*x0+2] * dist_x0y2 +
q3[3*x0+2] * dist_x0y3 +
q0[3*x1+2] * dist_x1y0 +
q1[3*x1+2] * dist_x1y1 +
q2[3*x1+2] * dist_x1y2 +
q3[3*x1+2] * dist_x1y3 +
q0[3*x2+2] * dist_x2y0 +
q1[3*x2+2] * dist_x2y1 +
q2[3*x2+2] * dist_x2y2 +
q3[3*x2+2] * dist_x2y3 +
q0[3*x3+2] * dist_x3y0 +
q1[3*x3+2] * dist_x3y1 +
q2[3*x3+2] * dist_x3y2 +
q3[3*x3+2] * dist_x3y3 ) ;
float thre = 198.0f;
if( (abs(p[3*j]-q1[3*x1]) > thre) || (abs(p[3*j+1]-q1[3*x1+1]) > thre) ||
(abs(p[3*j+2]-q1[3*x1+2]) > thre) )
{
p[3*j] = q1[3*x1];
p[3*j+1] = q1[3*x1+1];
p[3*j+2] = q1[3*x1+2];
}
break;
}
}
}
}
}
}