opencv 4.0 形态学图像处理(粒度测定、腐蚀膨胀、开闭运算、顶帽黑帽运算、形态学重建)C++代码实现
形态学原理原理介绍
数字图像处理 第三版》(冈萨雷斯)——第九章 形态学图像处理
本文所有程序均在ubuntu环境编写,Windows 兼容性未知,理论上不会有什么问题,如果运气不好,运行失败,建议百度。
腐蚀膨胀
opencv4.0中提供了腐蚀膨胀的函数 erode()、dilate()函数,用起来也方便。但是我的课程实践要求自己编写函数,所以这里附上不依赖opencv膨胀腐蚀函数的c++的腐蚀膨胀程序的实现代码。
//膨胀函数
void dilatetest(uchar *imageBuffer,uchar *outBuffer,int imageWidth,int imageHeight)
{
uchar *dilateBuffer = (uchar *)malloc((imageWidth+2)*(2+imageHeight)); //开辟空间 (扩展边界便于处理原图像边界)
memset(dilateBuffer,0,(imageHeight+2)*(imageWidth+2));
for (int i = 0;i < imageHeight;i++) //读取img的值,跳过边界点。
{
for (int j = 0 ; j < imageWidth; j++)
{
dilateBuffer[(i+1)*(imageWidth+2)+j+1] = imageBuffer[i*imageWidth + j];
}
}
/*以rows=cols=3为例 imageBuffer为[123456789] dilateBuffer为[0000001230045600789000000]*/
uchar *srcImage = dilateBuffer;
for (int i = 0;i < imageWidth; i++)
{
for (int j = 0;j < imageHeight;j++)
{
uchar MaxNum = 0;
srcImage = (dilateBuffer + (i*(imageWidth +2)+j)); //实现锚点的遍历
for (int m = 0;m<3;m++) //3x3的内核
{
for (int n = 0; n < 3;n++)
{
if (MaxNum < srcImage[n]) //将内核中最大的像素值提取
{
MaxNum = srcImage[n];
}
}
srcImage = (srcImage + m*(imageWidth +2)); //跳到内核下一行
}
outBuffer[i*imageWidth +j] = MaxNum; //将锚点的值付给一个动态内存空间
}
}
}
//腐蚀定义 定义与膨胀雷同 区别是提取最小像素值
void erodetest(uchar *imageBuffer,uchar *outBuffer,int imageWidth,int imageHeight)
{
uchar *erodeBuffer = (uchar *)malloc((imageWidth+2)*(2+imageHeight));
memset(erodeBuffer,255,(imageHeight+2)*(imageWidth+2));
for (int i = 0;i < imageHeight;i++)
{
for (int j = 0 ; j < imageWidth; j++)
{
erodeBuffer[(i+1)*(imageWidth+2)+j+1] = imageBuffer[i*imageWidth + j];
}
}
uchar *srcImage = erodeBuffer;
for (int i = 0;i < imageWidth; i++)
{
for (int j = 0;j < imageHeight;j++)
{
uchar tempNum = 255;
srcImage = (erodeBuffer + (i*(imageWidth +2)+j));
for (int m = 0;m<3;m++)
{
for (int n = 0; n < 3;n++)
{
if (tempNum > srcImage[n])
{
tempNum = srcImage[n];
}
}
srcImage = (srcImage + m*(imageWidth +2));
}
outBuffer[i*imageWidth +j] = tempNum;
}
}
}
开闭运算、顶帽黑帽运算
开运算、顶帽运算就是利用图像的腐蚀膨胀进行操作
开运算 :先腐蚀再膨胀。
顶帽运算:原图像减去开运算图像
开运算、顶帽运算代码(闭运算、黑帽运算类似):
#include 粒度测定
opencv里有一个很好的函数morphologyEx,我们只要往这个函数传相应的处理参数,就可以进行相应结构元素的操作了,使用起来非常方便。
morphologyEx() 函数的使用参考下面这个文章:
opencv形态学操作函数morphologyEx
opencv中 getStructuringElement()函数可用于构造一个特定大小和形状的结构元素,用于图像形态学处理。
介绍如下:
opencv之getStructuringElement()函数
代码如下:
#include 这里添加了一个结构元素动态调整的功能,便于观察图像的变化。
实现功能的函数是:createTrackbar()、CallBack_demo().
形态学重建
代码:
#include 这个程序有一些问题,运行的结果有一些失真,需要优化重建函数。
运行结果
膨胀腐蚀
膨胀

腐蚀

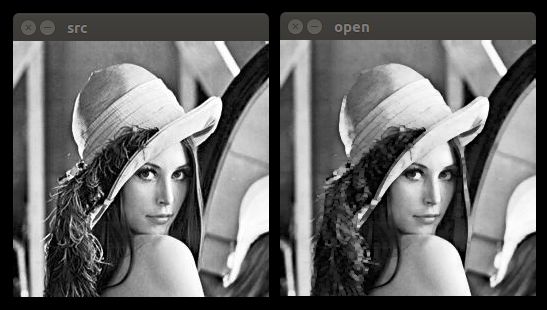
开运算、顶帽运算
开运算
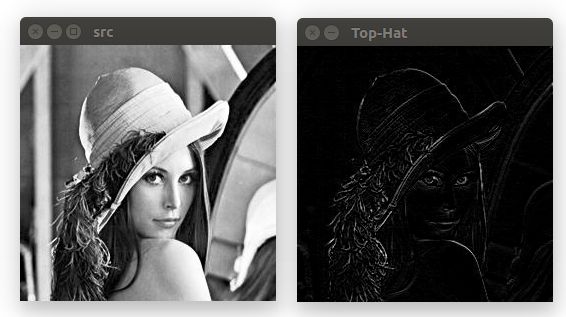
顶帽运算
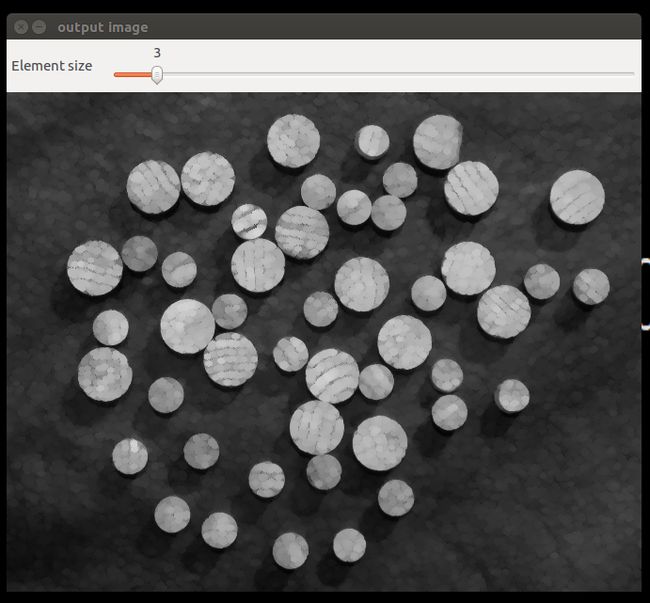
粒度测定
原图
可以看出图中有许多圆形的钉子

粒度测定
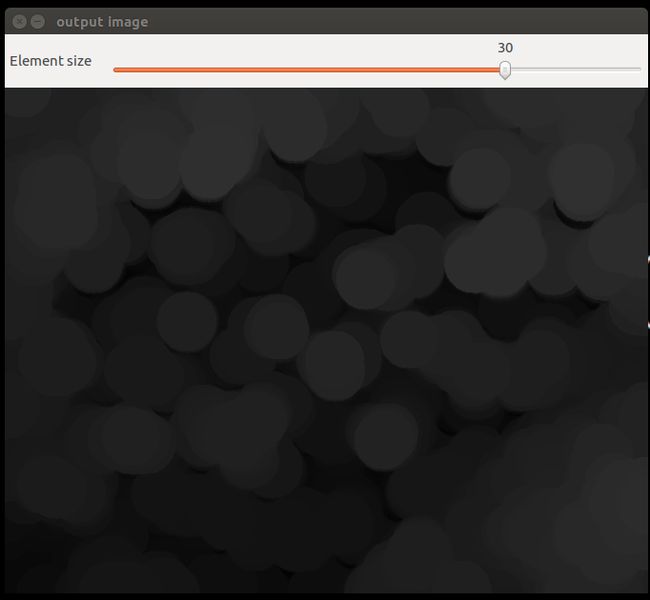
图中的拉条可以动态调整结构元素element的大小,便于观察图像的变化过程。
粒度测定,element=19:
当element的大小为19时,图中的小钉子已经基本消失

粒度测定,element=30:
当element的大小为30时,图中的大钉子也已经消失
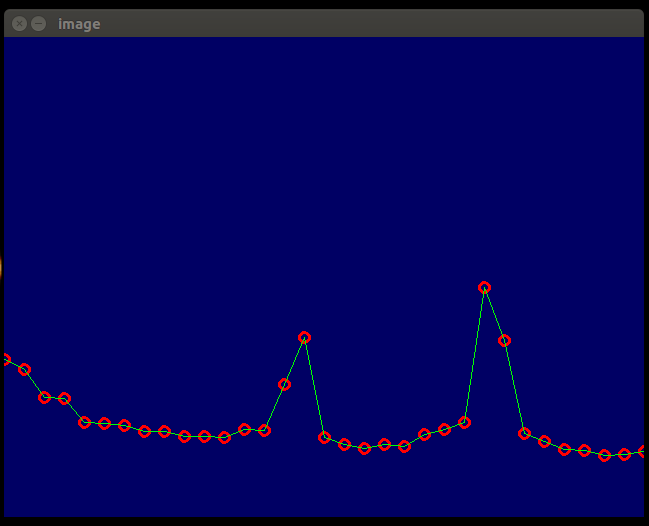
粒度测定,折线图:
通过绘制相邻像素差的与折线图,可以清晰的看到两个峰值,也就说明原图中有2种大小的钉子,且钉子的尺寸对应相应峰值点的element的大小。
参考
[1]https://blog.csdn.net/whchang8/article/details/56834608
[2]https://blog.csdn.net/lhm_19960601/article/details/82560560