python学习之双目图像得到景深图(及遇到的问题)
双目视觉测距主要是利用了目标点在左右两幅图像上成像的横向坐标存在的视差,视差与目标点到成像平面的距离Z存在着反比关系:Z=fT/d
首先下载一些先关的软件包(有就不用安装了):
pip install --upgrade setuptools
pip install numpy Matplotlib
pip install opencv-python
pip install --user opencv-contrib-python
需要说明的是;采用pip安装对网速的是有要求的,有时会导致安装失败,有时也可能是其他原因导致失败;解决方法之一就是继续重新安装,直到成功!
在进行一个简单测试的代码是,出现问题:
raceback (most recent call last):
File "G:\WangLuoRuanJian\Myapp\shiyan\chuankoult\theone\leftjiaoz.py", line 22, in
disparity = stereo.compute(img_L, img_R)
cv2.error: OpenCV(4.1.0) C:\projects\opencv-python\opencv\modules\calib3d\src\stereobm.cpp:1110: error: (-209:Sizes of input arguments do not match) All the images must have the same size in function 'cv::StereoBMImpl::compute'
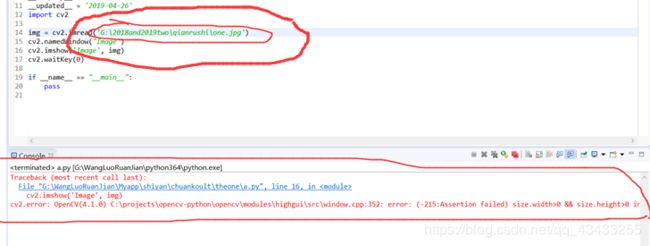
改变文件的读取路径的方式;将‘\’变为’/'就不会出错了!
测试结果:

测试代码:
#!/usr/bin/env python3
# -*- coding:utf-8 -*-
u'''
Created on 2019年4月22日
@author: wuluo
'''
__author__ = 'wuluo'
__version__ = '1.0.0'
__company__ = u'重庆交大'
__updated__ = '2019-04-26'
import cv2
import numpy as np
from matplotlib import pyplot as plt
img_L = cv2.imread('G:\2018and2019two\qianrushi\one.jpg', 0)
img_R = cv2.imread('G:/2018and2019two/qianrushi/two.jpg', 0)
# OpenCV 3.0的函数为StereoBM_create
stereo = cv2.StereoBM_create(numDisparities=16, blockSize=15)
disparity = stereo.compute(img_L, img_R)
plt.subplot(121), plt.imshow(img_L, 'gray'), plt.title(
'img_left'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(disparity, 'gray'), plt.title(
'disparity'), plt.xticks([]), plt.yticks([])
plt.show()
if __name__ == "__main__":
pass
从网址:http://vision.middlebury.edu/stereo/data/ 中任意选择两组双目图像(各left-right两张图片);
双目景深图代码:
#!/usr/bin/env python3
# -*- coding:utf-8 -*-
u'''
Created on 2019年4月22日
@author: wuluo
'''
__author__ = 'wuluo'
__version__ = '1.0.0'
__company__ = u'重庆交大'
__updated__ = '2019-04-26'
# 原始jpg已经畸变矫正
import numpy as np
import cv2
IMAGE_WIDTH = 800
IMAGE_HEIGHT = 600
capL = cv2.VideoCapture(2)
capR = cv2.VideoCapture(0)
imgL = np.zeros((IMAGE_WIDTH, IMAGE_HEIGHT, 3), np.uint8)
imgR = np.zeros((IMAGE_WIDTH, IMAGE_HEIGHT, 3), np.uint8)
stereo = None
opencv_measure_version = int(cv2.__version__.split('.')[0])
windowSize = 5
minDisp = 10
numDisp = 250 - minDisp
stereo = cv2.StereoSGBM_create(
minDisparity=minDisp,
numDisparities=numDisp,
blockSize=16,
P1=8 * 3 * windowSize**2,
P2=32 * 3 * windowSize**2,
disp12MaxDiff=1,
uniquenessRatio=10,
speckleWindowSize=100,
speckleRange=32
)
capL.set(cv2.CAP_PROP_FRAME_WIDTH, IMAGE_WIDTH)
capL.set(cv2.CAP_PROP_FRAME_HEIGHT, IMAGE_HEIGHT)
capR.set(cv2.CAP_PROP_FRAME_WIDTH, IMAGE_WIDTH)
capR.set(cv2.CAP_PROP_FRAME_HEIGHT, IMAGE_HEIGHT)
imgL = cv2.imread('G:/2018and2019two/qianrushi/one.jpg')
imgR = cv2.imread('G:/2018and2019two/qianrushi/two.jpg')
# create gray images
imgGrayL = cv2.cvtColor(imgL, cv2.COLOR_BGR2GRAY)
imgGrayR = cv2.cvtColor(imgR, cv2.COLOR_BGR2GRAY)
# calculate histogram
imtGrayL = cv2.equalizeHist(imgGrayL)
imtGrayR = cv2.equalizeHist(imgGrayR)
# through gausiann filter
imgGrayL = cv2.GaussianBlur(imgGrayL, (5, 5), 0)
imgGrayR = cv2.GaussianBlur(imgGrayR, (5, 5), 0
cv2.imshow("image left", imgGrayL)
cv2.imshow("image right", imgGrayR)
# calculate disparity
disparity = stereo.compute(imgGrayL, imgGrayR).astype(np.float32) / 16
disparity = (disparity - minDisp) / numDisp
cv2.imshow("disparity", disparity)
cv2.waitKey(0)
if __name__ == "__main__":
pass
运行的结果图:
